 六段段存储介绍
六段段存储介绍

.text
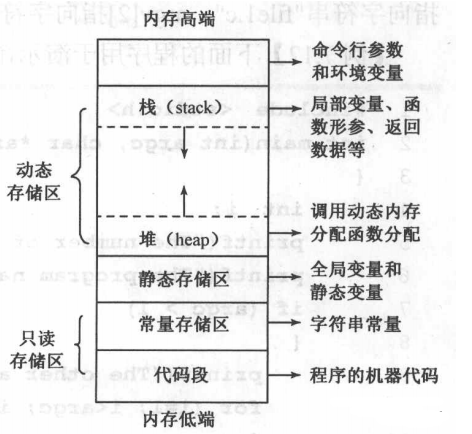
.text代码段: 用来放程序代码(code), 在代码编译完成后, 长久只读存放于此,属于图中的代码段
.constdata
.constdata只读常量数据段: const限定的数据类型存放在此,属于图中的常量存储区
.data
用来存放初始化不为0的全局变量(global)和静态变量(static),它是可读可写的,属于图中的静态存储区
.bss
.bss的英文是Block Started by Symbol,翻译过来就是由符号开始的块。此部分类似于数据部分,只是它不占用可执行文件中的空间。
bss通常是指用来存放程序中没有初始化或初始化为0的全局变量和静态变量的一块内存区域,可读可写,属于图中的静态存储区,如果变量未初始化,系统会将变量初始化为0。
heap
heap堆区: 通常我们说的动态内存分配,使用malloc/free进行申请和释放,属于动态存储区。
stack
stack栈区: 在代码执行时用来保存函数的局部变量和参数,属于动态存储区。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
存储
+关注
关注
13文章
4935浏览量
90396
发布评论请先 登录
相关推荐
热点推荐
静态型液晶屏驱动点阵式液晶显示驱动VKS118静态扫描段码驱动
产品品牌:永嘉微电/VINKA
产品型号:VKS118
封装形式:LQFP128
VKS118是一个点阵式存储映射的LCD驱动器,可支持静态扫
描点数最大118点(118SEGx1COM)的LCD屏
发表于 05-22 11:20
变频器多段速间跳变时间怎么设定
变频器多段速间的切换速度,实际上是由 加/减速时间 这个参数控制的。它决定了频率变化时的过渡斜坡,而非一个独立的“跳变时间”参数。 不过,具体怎么设置,取决于你的控制方式是 外部端子切换 还是 内部

液晶段码LCD驱动段码屏控制电路单相电表液晶驱动VK0192
产品品牌:永嘉微电/VINKA
产品型号:VK0192封装形式:LQFP44概述VK0192是一个点阵式存储映射的LCD驱动器,可支持最大192点(24SEGx8COM)的LCD屏。单片机可通过3
发表于 04-16 10:10
液晶段码屏驱动器抗干扰段码屏驱动适用于暖风机LCD驱动VK0192
产品品牌:永嘉微电/VINKA
产品型号:VK0192封装形式:LQFP44概述VK0192是一个点阵式存储映射的LCD驱动器,可支持最大192点(24SEGx8COM)的LCD屏。单片机可通过3
发表于 04-15 17:22
线激光轮廓传感器助力笔记本缝隙段差检测
检测需求笔记本的侧边缝隙大小和平面段差情况直接反映了产品的装配工艺水平。过大的缝隙可能使灰尘、水分等容易进入笔记本内部,影响其使用寿命;而明显的平面段差会破坏产品的整体美感,降低用户对产品的满意度

德州仪器BCD到七段译码器/驱动器深度剖析
德州仪器BCD到七段译码器/驱动器深度剖析 在数字电路设计中,BCD到七段译码器/驱动器是实现数字显示的关键组件。德州仪器(TI)的SN5446A、’47A、’48、SN54LS47、’LS48
FDCAN 数据段波特率增加后发送失败的问题分析
客户在使用 FDCAN 协议,仲裁段波特率配置位 1Mbit/s,数据段波特率配置为 5Mbit/s时,发现 FDCAN 发送功能异常。首先建议客户使用 IC 内部回环模式进行测试发现 5M
发表于 01-04 11:16
•0次下载
汇编程序段的定义介绍
操作数不能同时是存储器操作数,也不能同时是段寄存器;
目的操作数不能是立即数;
代码段基址寄存器CS不能作目的操作数;
使用立即数作为源操作数时,立即数会按照目的操作数的类型进行扩展。
强制类型转换语法(要谨慎使用):
数
发表于 11-21 08:19
编译器如何指定代码的地址段?
我在官方 gcc 的基础上添加了自定义指令,目前可以正确编译出汇编代码,但是我该如何指定汇编结果的地址段,让生成的代码符合蜂鸟的地址分配呢?求助大神帮助指导一下,thx~
发表于 11-10 06:06
关于系统链接脚本的介绍
起来后所处于的地址,程序中的相对寻址都会遵从此虚拟地址。
四、关于ITCM和DTCM(若使用FLASH下载模式)
(1) 代码段上载到ITCM,ITCM起始地址(0x80000000)存储的代码就是主函数的入口。
(2)数据段
发表于 10-30 08:26
自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?
[首发于智驾最前沿微信公众号]最近有小伙伴提问,一段式端到端和二段式端到端有什么区别。其实说到自动驾驶里的“端到端”,很多人第一反应其就是把传感器的原始数据直接变成车辆的控制指令。比如在大模型中输入

自动驾驶中常提的一段式(单段)端到端是个啥?
自动驾驶技术的发展,催生出端到端技术的应用,一段式端到端(end-to-end single-stage)作为端到端技术的一种实现方式,指的是用一个学习模型把传感器输入(比如摄像头图像、激光雷达点云、惯导数据等)直接映射到车辆控制指令(例如转向角、油门、制动)。
STM32驱动段码屏,有一个14段数字,有4个段位没有显示是怎么回事?
背景:STM32L433驱动37引脚的段码,第7个数字和8个数字某些段不显示。不显示段如下
7B7K7CK4[td]8F8J8EK7现象:
对应引脚的波形:
(单个数字显示时)正常显示引脚的波形
求各位大佬帮忙看一下
发表于 06-20 06:26



评论