 如何用RC发射器和接收器控制机器人
如何用RC发射器和接收器控制机器人

步骤1:连接起来

电机:
如果每侧有不止一个电机:请在每个电机上接线并联
将电动机导线连接到RoboClaw电动机控制器上的螺钉端子,如图
有刷直流电动机是可逆的。如果一侧没有朝您期望的方向移动,则只需在连接到马达控制器的位置交换+和-线即可。
接收器:
将接收器连接到RoboClaw,如图所示。黄线朝向机器人爪的外边缘,并朝向接收器上的标签(例如CH1)。
BEC:
看一下电动机2个标有“ LB-MB”的引脚的控制器,并确保它们之间有跳线。 LB-MB代表逻辑电池-电动机电池。使用跳线意味着无需连接单独的电池为电动机控制器逻辑供电,而是可以使用为电动机供电的同一电池。这称为BEC(电池消除器电路)。
电池:
准备将电池连接到电动机控制器,但不要暂时将其连接。只要它与电动机和电动机控制器的电压范围相匹配,并且具有足够高的mAh额定值即可为电动机供电,几乎任何小型LiPo都可以使用。
关于LiPo的一些注意事项(
锂聚合物
)电池:
它们具有几种不同的度量标准,它们的等级分别为:
mAh (毫安小时): mAh额定值使您的机器人可以运行的时间越长。有关详细说明,请参见http://electronics.stackexchange.com/questions/792 。..
假设您要使用这种610mAh电池作为电池有6个电机的转向架。每个电动机将在190mA(无负载)至250mA(最大负载)之间汲取功率。乘以6,您将得到这些电机汲取的1,140mA-1,500mA范围。由于使用此电池和机器人组合,您可以通过将电池的mAh除以负载的mA来估算运行时间,因此您可以在24分钟至1小时52分钟的运行时间之间进行选择。
S (串联):表示串联连接了多少个单个电池。由于每个电池的标准电压为3.7v,因此2S电池将为7.4v,而3s电池将为11.1v,依此类推。请记住,充满电的LiPo电池每节将输出约4.2v的电量,因此在充电后,您将在2s的LiPo中获得的确更像8.4v,而在3s的LiPo中得到的则是12.6v。
V (伏特):锂电池通常只列出S而不是伏特,因为它可以由S值确定。 电压越高,电动机旋转得越快。
C (容量):电池的最大安全放电率。 。具有20C的1,000mAh电池可以处理20A的负载。有关详细说明,请参见https://www.commonsenserc.com/page.php?page=c_ratings_explained.html。
永远不要让您的LiPo电池电压降至或低于3v 。..。..这意味着,如果您使用的是2S LiPo,则不想让它获得降至6v。
为LiPo电池充电时始终要小心。
第2步:配置
但是首先要注意通道混合:
变送器上每个操纵杆的x和y轴都有自己的通道(这就是我们的2个操纵杆变送器有4个通道的原因)。我们将只使用正确的操纵杆。
如果我们不混合通道,则向前或向后推动操纵杆将驱动机器人的一侧,向左和向右推动操纵杆将驱动机器人的另一侧。因此,我们将要混合通道1和2,以便向前推动操纵杆可推动两侧向前,向后推动将推动两个通道都向后移动,向左和向右推动操纵杆将使机器人的油箱风格得到控制。
有使用此设置进行通道混合的2种方法:要么让变送器进行混合,要么让电动机控制器进行混合。经过对两者的试验,我发现让电动机控制器进行混合对于驱动机器人来说效果更好。这是因为当我让发射器进行混合(以下称为“混合模式B”)时,对角线(左上,右上,右下,左下)移动操纵杆根本不会驱动机器人,如果这不是您期望的行为,这可能会令人迷惑。我猜想Tactic之所以这样做是因为它在RC飞机世界中是有意义的。..我之所以得出这样的推测,是因为用户手册似乎非常偏向RC飞机(基于命名法)。
RoboClaw电动机控制器设置:
您可以通过板上的瞬时按钮或通过USB电缆插入PC并使用IonMotion设置应用程序来更改RoboClaw设置,但请确保首先安装USB Roboclaw Windows驱动程序。
现在,我假设您正在使用板上按钮。您可以更改“模式”,“选项”和“电池”设置。
单击“模式”或“设置”或“ LIPO”分别进入“模式设置”,“选项设置”或“电池设置”。
无论使用哪种设置您输入的STAT2指示灯将开始闪烁,以告诉您当前选择的设置。
当您处于三种设置之一时,SET和MODE按钮将分别增加和减少设置。单击LIPO按钮将应用设置并退出设置。
您需要模式2(带有混合功能的RC模式)和适当的电池设置。
打开RoboClaw的电源
将模式设置为具有混合功能的RC模式(模式2):
单击MODE按钮
单击“模式”或“设置”,直到出现以下闪烁模式:(2次快速闪烁,暂停,重复)。
单击LIPO保存更改并退出设置
设置电池设置以匹配您的电池,让我们假装您正在使用3S LiPo:
单击LIPO按钮
单击MODE或SET按钮,直到出现以下闪烁模式:(4次快速闪烁,暂停,重复) 。
单击LIPO按钮退出设置
关闭RoboClaw的电源
我们不需要设置
您可以在RoboClaw用户手册中了解有关所有这些设置的更多信息。
Tactic TTX410 发射机设置:
开箱即用的Tactic TTX410发射机未配置为混合通道。正如我上面提到的,我们要这样离开。但是,Tactic TTX410上有不同的通道混合模式,如果打开时听到一声以上的哔哔声,则说明您正在发射机上使用通道混合,并且将需要知道如何将其关闭。
要更改/禁用混合模式:
关闭发射机电源,将右摇杆移至右下角,将左摇杆移至左下角,然后按住这些位置。
打开发射机电源开关。您会听到一系列哔声(现在可以松开操纵杆)。如果您的耳朵听到的哔哔声数量不符合您的期望,请将其关闭并再次进行。
1声哔哔声=不混合
2声哔哔声=混合模式A(混合左摇杆X轴和右摇杆Y轴)
3声哔哔声=混合模式B(混合右摇杆X和Y轴)
有关更多信息,请参阅《 Tactic TTX410用户手册》。
第3步:对其进行测试

打开变送器,然后向电动机控制器供电并进行测试!
记住始终先打开变送器。
RoboClaw将花费大约一秒钟的时间来校准中性位置,具体取决于
如果一侧或两侧与您想要的方向相反,您可以执行以下两项操作之一:
您可以在连接速度控制器的地方交换红色和黑色电动机导线。
或者您可以按下发射器上的相应DIP开关。在我使用的Tactic TTX410系统上,您可以通过切换电池面板来访问DIP开关,通道1可以被DIP开关1颠倒,依此类推。
-
机器人
+关注
关注
213文章
31527浏览量
223933 -
接收器
+关注
关注
15文章
2652浏览量
77599 -
发射器
+关注
关注
7文章
921浏览量
55459
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
机器人竞技幕后:磁传感器芯片激活 “精准感知力”

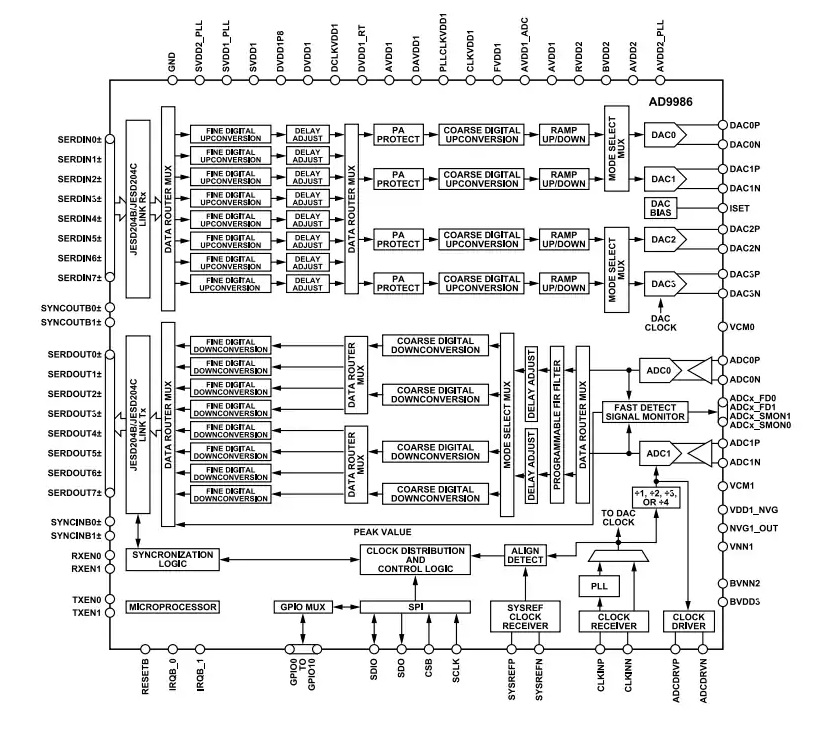
Analog Devices Inc. AD9986 4T2R射频发射器和观察接收器数据手册
LE 发射器和接收器测试返回错误结果是什么原因导致的?
15KV ESD保护 RS-232发射器/接收器ICL3237E数据手册
ESD保护 RS-232发射器/接收器HIN208E数据手册
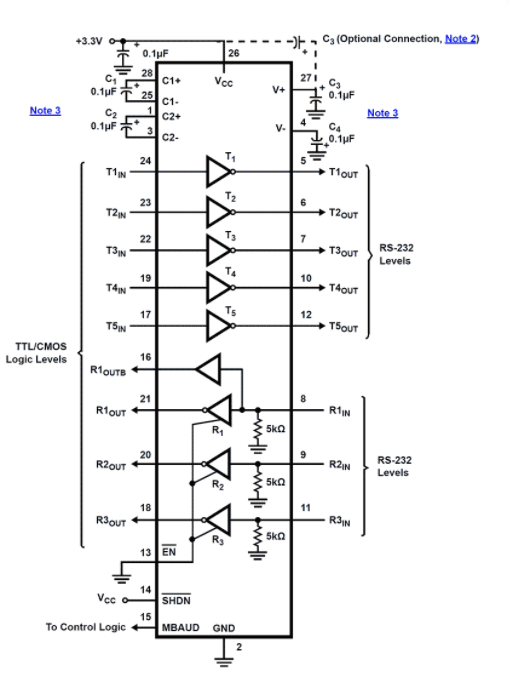
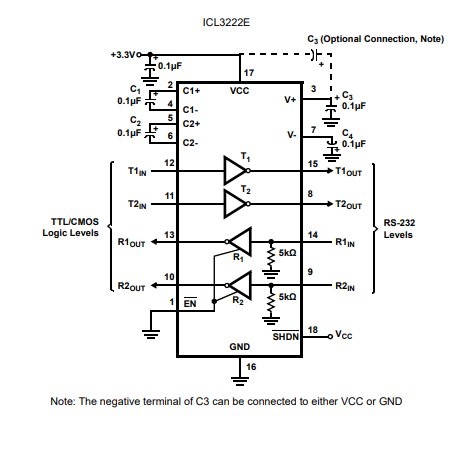
15kV ESD保护RS-232发射器/接收器ICL3222E数据手册
HIN206E RS-232发射器/接收器数据手册
HIN202E RS-232发射器/接收器数据手册
带0.1F外部电容的+5V供电RS-232发射器/接收器HIN202数据手册
+5V供电的RS-232发射器/接收器HIN232数据手册
15kV ESD保护RS-232发射器/接收器HIN211E数据手册



评论