完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > ethercat

EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation Technology(控制自动化技术)首字母的缩写。
EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation Technology(控制自动化技术)首字母的缩写。最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。
EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation Technology(控制自动化技术)首字母的缩写。最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。
原理
目前有多种用于提供实时功能的以太网方案:例如,通过较高级的协议层禁止CSMA/CD存取过程,并使用时间片或轮询过程来取代它。其它方案使用专用交换机,并采用精确的时间控制方式分配以太网数据包。尽管这些解决方案能够比较快和比较准确地将数据包传送到所连接的以太网节点,但带宽的利用率却很低,特别是对于典型的自动化设备,因为即使对于非常小的数据量,也必须要发送一个完整的以太网帧。而且,重新定向到输出或驱动控制器,以及读取输入数据所需的时间主要取决于执行方式。通常也需要使用一条子总线,特别是在模块化I/O系统中,这些系统与Beckhoff K-总线一样,通过同步子总线系统加快传输速度,但是这样的同步将无法避免引起通讯总线传输的延迟。
通过采用EtherCAT技术, Beckhoff突破了其它以太网解决方案的这些系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。当帧通过每一个设备(包括底层端子设备)时,EtherCAT从站控制器读取对于该设备十分重要的数据。同样,输入数据可以在报文通过时插入至报文中。在帧被传递 (仅被延迟几位)过去的时候,从站会识别出相关命令,并进行处理。此过程是在从站控制器中通过硬件实现的,因此与协议堆栈软件的实时运行系统或处理器性能无关。网段中的最后一个EtherCAT从站将经过充分处理的报文返回,这样该报文就作为一个响应报文由第一个从站返回到主站。
从以太网的角度看,EtherCAT总线网段只是一个可接收和发送以太网帧的大型以太网设备。但是,该“设备”不包含带下游微处理器的单个以太网控制器,而只包含大量的EtherCAT从站。与其它任何以太网一样,EtherCAT不需要通过交换机就可以建立通讯,因而产生一个纯粹的EtherCAT系统。


人形机器人开发加速器:EC-Engineer Web + Jetson AGX Orin 的远程诊断新玩法
在全球工业与机器人领域,人形机器人的研发正迎来高速发展。这类机器人不仅依赖强大的AI算力,更要求底层控制系统具备高实时性与高可靠性。在此趋势下,Nvid...

开发者分享 | HPM5E-EC-DEV:基于HPM5E00的EtherCAT开发板分享
Azure一名业余单片机爱好者,平时喜欢折腾各种开发板和新出的MCU。本职工作是一名软件工程师,日常主要从事软件应用开发,更多是和系统、应用打交道。相比...

在工业自动化领域,系统灵活性和维护性至关重要。本文将探讨EtherCAT从站热插拔技术,介绍其如何通过动态管理从站设备,提高系统的灵活性和维护性。Eth...
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
在工业自动化领域,运动控制的精度和稳定性直接决定了生产效率和产品质量。近日,睿擎SDKV1.5.0版本重磅发布,其中EtherCAT多轴控制技术的升级尤...

讲解一、工业常用网口协议分类工业场景中,网口协议需兼顾“通信稳定性”“同步精度”“抗干扰能力”三大核心需求,不同协议因设计目标差异,在防护方案选型上存在...

新能源产线中,发那科机器人通过协议转换网关与EtherCAT运动控制卡协同作业实例
一、项目背景 在新能源锂电池电芯装配车间,某企业引入发那科M-10iA系列机器人负责极片搬运与堆叠工序,该机器人采用EtherNet/IP协议作为从站设...
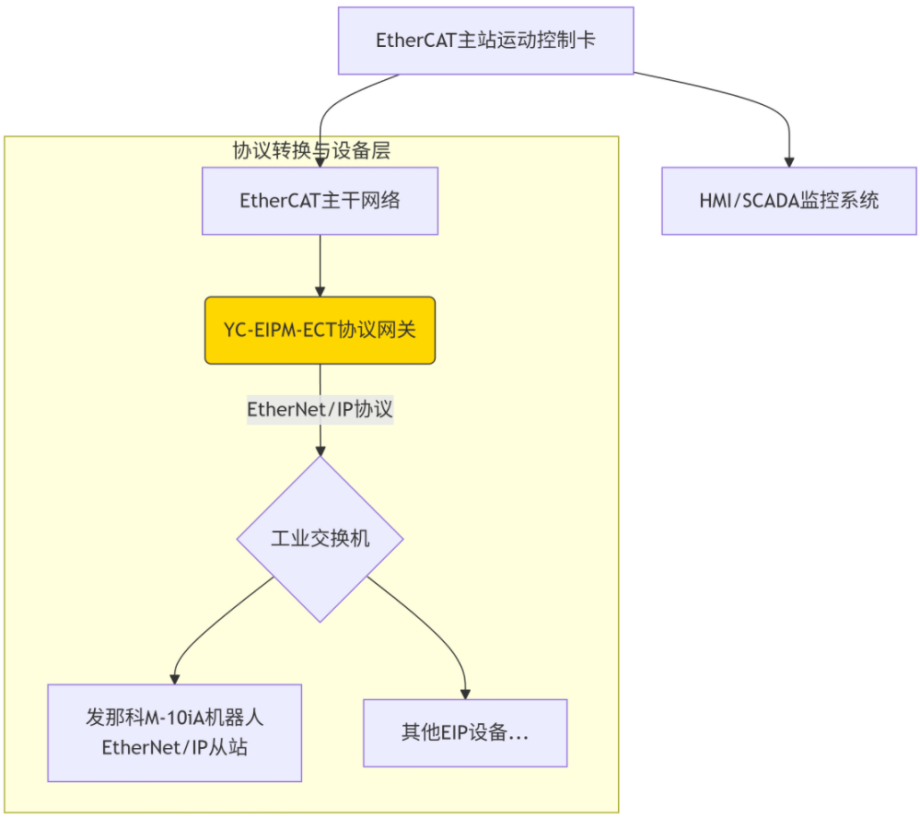
发那科机器人借助EtherNet/IP转EtherCAT网关,实现与EtherCAT运动卡的高效互联案例
一、项目背景 在新能源锂电池电芯装配车间,某企业引入发那科M-10iA系列机器人负责极片搬运与堆叠工序,该机器人采用EtherNet/IP协议作为从站设...

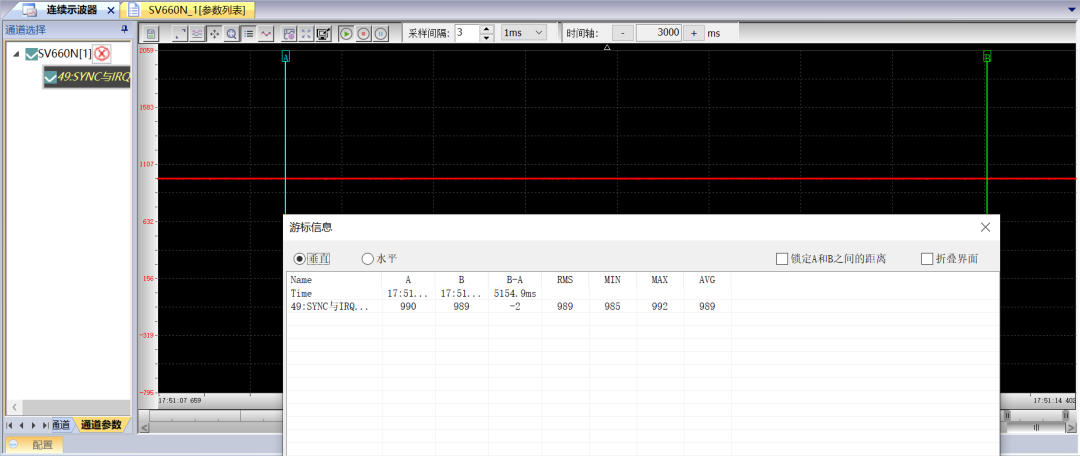
上篇提到利用EtherCAT产生的sync信号,同步所有从站节点系统,完成在同一时刻的电机指令更新。那么,今天跟大家介绍的是如何利用sync信号去同步电...
恩智浦i.MX RT1180跨界MCU驱动EtherCAT的工作流程
上周的分享已经介绍了整个参考设计的概况和相关硬件资源。那么,本次会从软件工程角度进行分享。首先来了解EtherCAT Slave工作流程。
使用虹科协议开发方案和瑞萨 RZ T2M实现下一代工厂自动化立即下载
类别:电子资料 2022-06-22 标签:ProfinetethercatEthernet IP

12月10日 晚8点:手把手实战EtherCAT,用睿擎平台搞定多轴精密运动控制|问学直播
还在为多轴同步精度发愁?这场直播带你从协议原理到代码实操,一次学透工业级运动控制核心。在工业自动化领域,运动控制的精度与实时性直接决定了设备性能的上限。...
EtherCAT转RS485协议转换网关:倍福CX5140PLC 与汇川 MD300变频器通讯案例
一、项目背景 在自动化设备制造行业,某企业专注于生产高精度的自动化装配设备。其新研发的设备中,倍福的CX5140PLC作为EtherCAT协议的主站,用...
CCLinkIE转EtherCAT协议转换网关:三菱PLC与倍福系列IO模块通讯案例
一、项目背景 在汽车制造行业,某汽车零部件制造企业正在建设一条高度自动化的汽车车身焊接生产线。该生产线上,三菱PLC作为CCLinkIE协议的主站,...

VFBOX协议转换网关支持PLC,modbus,EthernetIP,Profinet,CCLink,EtherCAT,IEC61850,IEC104,...

IGH EtherCAT 主站上 ARMxy的真实表现:稳定、快到离谱
一、EtherCAT 是什么?一个精妙的比喻 首先,忘掉传统网络的想法。您可以这样想象: 传统以太网(如TCP/IP): 就像邮差给一栋公寓楼的每家每...
EtherCAT转ProfiNet:协议转换网关赋能倍福控制器与西门子 PLC 电子装配线实战
一、 项目背景与需求分析 随着全球能源结构向清洁化转型,储能系统(ESS)成为新能源并网的核心基础设施。某新能源科技公司在其50MWh集装箱式储能项目中...

倍福 CX5140 与汇川 MD300 通讯:EtherCAT 转 MODBUS 协议转换网关实战
一、项目背景 在机器人制造行业,某工业机器人制造企业正在建设一条高度自动化的工业机器人装配生产线。该生产线上广泛应用了各种先进的自动化工设备,如高精...
跨协议工业联动:EtherCAT 转 CAN 网关赋能 CX5140 控制器 + MD300 变频器数据互通
一,项目背景 在新能源汽车制造行业,某汽车零部件生产企业的生产线面临着设备通信不畅的难题。其生产线上的PLC主站采用的是EtherCAT协议,而部分变频...
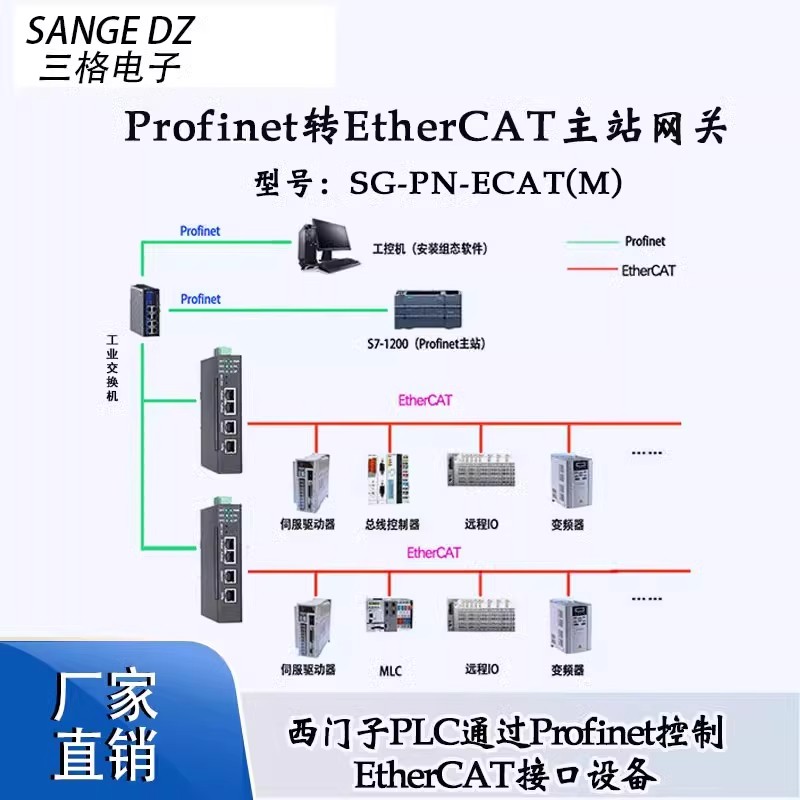
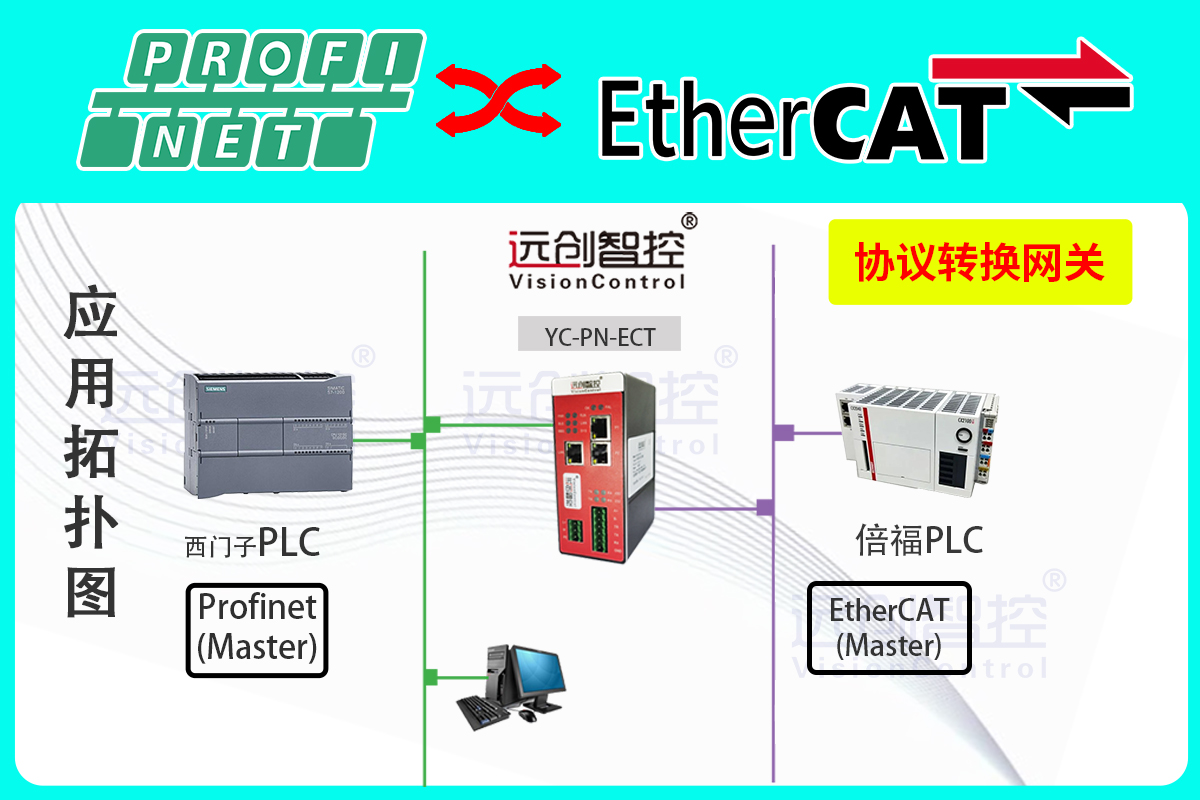
Profinet 转 EtherCAT 主站网关:工业通信的无缝桥梁
在现代工业自动化系统中,多种工业以太网协议并存已成为常态。Profinet和EtherCAT作为两种广泛应用但技术架构迥异的工业以太网协议,往往需要在同...
Delta并联机器人高速抓放应用解决方案:基于BL350与EtherCAT的硬实时控制
在 食品、药品、电子元器件 等行业的包装与分拣产线上,Delta并联机器人(又称“蜘蛛手”)因其高速度、高重复定位精度,已成为实现高效 抓放作业 的核心...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1