 IGH EtherCAT 主站上 ARMxy的真实表现:稳定、快到离谱
IGH EtherCAT 主站上 ARMxy的真实表现:稳定、快到离谱

一、EtherCAT 是什么?一个精妙的比喻
首先,忘掉传统网络的想法。您可以这样想象:传统以太网(如TCP/IP):就像邮差给一栋公寓楼的每家每户送信。邮差需要走到每一户门口(节点),敲门,等待,把信(数据)交给住户。效率低,延迟高。
EtherCAT:就像一列高速行驶的“数据火车”。这列火车只有一个车头(主站),它沿着轨道(网络)飞驰。每个站台(从站设备)都有一个工人,当火车经过时,工人以闪电般的速度:
取走车上指定给自己的“货物”(输出数据/指令)。
放上自己要发送的“货物”(输入数据/状态)。 火车在整个环线上跑一圈回到车头时,所有数据的交换就完成了。
这个“数据火车”的机制,就是 EtherCAT 高性能的核心。

二、EtherCAT 的核心优势
基于上述原理,EtherCAT 带来了革命性的优势:
极致的速度与超低延迟
数据:更新1000个数字量I/O的时间小于30微秒(μs)。更新100个伺服轴的位置指令只需100微秒。这比传统的现场总线(如Profibus, DeviceNet)快数十甚至数百倍。
极高的同步精度
技术:内置分布式时钟机制,可以校准网络中所有从站的本地时钟。
效果:可以实现纳秒级的同步精度。这意味着网络上成百上千个设备(如伺服驱动器)可以像同一个大脑指挥一样,实现绝对同步的动作。
出色的灵活性与拓扑结构
支持线型、树型、星型、环型等多种拓扑,使用标准的以太网线缆(如CAT5e)和连接器。现场布线极其方便,无需昂贵的交换机。
极高的带宽利用率
由于数据帧不需要在每个节点被接收、解包、再打包,而是“穿行而过”,有效数据带宽利用率高达90%以上,远高于传统以太网。
显著的成本效益
硬件成本:从站设备控制器芯片成本低。
布线成本:使用标准以太网线,拓扑灵活,节省大量线缆和接线工时。
集成成本:无需额外的网络硬件(如交换机),系统结构简单。
开放性与互操作性
由EtherCAT技术协会(ETG)管理,是一个开放的国际标准(IEC 61158)。确保了不同厂商的设备可以无缝集成,用户不会被单一供应商绑定
三、EtherCAT 在工业上的主要用途
EtherCAT 是现代高性能自动化系统的“神经系统”,主要应用于:
高性能运动控制:控制几十甚至上百个伺服电机,实现复杂的协同运动。
实时数据采集:与视觉系统、测量传感器等高速设备通信。
安全系统:通过Safety over EtherCAT (FSoE)协议,将标准控制和安全功能集成在同一根网线上。
四、多个实际应用场景例子
运动控制与机器人领域
六轴/七轴工业机器人
场景描述:用于焊接、搬运、喷涂、装配的关节机器人。
EtherCAT优势:极低的循环周期(<1ms)和纳秒级的同步精度,确保所有关节轴严格同步运动,实现末端执行器平滑、精确的轨迹控制。
Delta并联机器人(蜘蛛手)
场景描述:在包装、食品行业进行高速分拣和取放作业。
EtherCAT优势:极高的刷新率(可达500μs)和确定性延迟,使机器人能够以每分钟数百次的速度精准抓取运动中的物体。
SCARA机器人
场景描述:在电子行业进行高速、高精度的平面定位作业,如芯片插装。
EtherCAT优势:快速响应和同步控制,实现XY轴和Z轴之间的精准配合,提升生产节拍。
协作机器人
场景描述:与人类在共享工作空间中协同作业。
EtherCAT优势:除了高性能运动控制,还能通过Safety over EtherCAT集成安全功能(如力觉反馈、区域监控),在同一根网线上实现功能安全和标准控制。
CNC数控机床(五轴联动)
场景描述:用于航空航天、模具加工的高精度铣削、车削中心。
EtherCAT优势:多轴纳米级插补和绝对同步,确保复杂曲面加工的精度和表面光洁度。电子齿轮/电子凸轮功能简化了机械结构。
金属板材激光切割/焊接机
场景描述:高功率激光设备对金属板材进行二维或三维加工。
EtherCAT优势:高带宽允许将高分辨率的加工路径数据实时传输给驱动器,并与激光功率控制严格同步,实现切割速度和切口质量的完美控制。
木工加工中心
场景描述:用于家具制造,执行雕刻、开料、打孔等复杂工序。
EtherCAT优势:灵活的网络拓扑便于连接多个主轴、锯片和大量I/O(气动夹具、真空吸附),实现快速工具切换和复杂工艺流程。
包装、物料搬运与物流
高速枕式包装机
场景描述:对糖果、饼干等产品进行连续式包装。
EtherCAT优势:通过电子凸轮功能,实现送膜、成型、封切、打码等工位的严格同步,更换产品时只需更改参数,无需更换机械零件,极大提高灵活性。
灌装与旋盖生产线
场景描述:饮料、制药行业的液体灌装和容器封盖。
EtherCAT优势:将灌装泵的流量控制、旋盖电机的扭矩控制与传送带伺服主轴同步,确保灌装精度和封盖质量,同时通过IP67接口模块减少控制柜数量。
自动化立体仓库(AS/RS)
场景描述:堆垛机在立体货架中高速穿梭存取货物。
EtherCAT优势:对行走、升降、货叉三个伺服轴进行精准同步定位控制,实现高速、平稳、低冲击的运行,提升仓库吞吐效率。
交叉带分拣机
场景描述:在快递、物流中心分拣包裹。
EtherCAT优势:主PLC通过EtherCAT控制上百个分拣小车的伺服驱动器,精确控制每个小车在指定格口弹出包裹,系统延迟极低,分拣准确率高。
半导体、电子与精密制造
半导体贴片机
场景描述:将微小的电子元件贴装到PCB板上。
EtherCAT优势:极低的通信抖动(<1μs)确保运动平台与视觉相机、吸嘴之间的绝对同步,实现微米级的贴装精度和极高的产能(CPH)。
PCB钻孔机/飞针测试机
场景描述:在电路板上钻孔或进行电气测试。
EtherCAT优势:高带宽和确定性,确保海量的钻孔坐标或测试点数据能够实时、无延迟地送达驱动器,实现高速高精度定位。
晶圆搬运机器人
场景描述:在真空或洁净室环境下传输硅片。
EtherCAT优势:平滑的运动控制避免振动,防止脆弱的晶圆破损。线型拓扑简化了真空腔体内的布线。
线束加工机
场景描述:自动完成电线的切割、剥皮、压接端子。
EtherCAT优势:将送线伺服、旋转刀片伺服、端子机控制等集成在同一个网络中,实现高速、多品种的柔性生产。
过程工业与重型机械
塑料注塑机
场景描述:通过合模、注射、保压等工序生产塑料制品。
EtherCAT优势:将伺服泵控制系统、温度控制器、IO-Link主站集成,实现对注射速度、压力和温度的精确闭环控制,节能并提高产品质量。
橡胶轮胎成型机
场景描述:将多层橡胶、帘布等材料复合形成生胎。
EtherCAT优势:同步控制多个供料架、贴合头和主轴,确保材料铺设的精度和均匀性,同时记录所有工艺数据用于质量追溯。
印刷机械(报纸/包装印刷)
场景描述:多色组连续印刷。
EtherCAT优势:分布式时钟确保各印刷单元间达到微米级的套印精度,避免重影和色差。无硬件交换机,系统更可靠。
风电设备主控系统
场景描述:大型风力发电机的控制。
EtherCAT优势:通过光纤环网连接机舱顶部和底部的多个控制器、变桨系统和传感器,实现长距离(最远100m between nodes)、高抗干扰的可靠通信。
测试测量与特殊应用
汽车模拟器与测试台架
场景描述:用于车辆动力学仿真或零部件耐久性测试。
EtherCAT优势:硬实时性能与仿真模型(如Simulink Real-Time)完美结合,精确同步控制多个液压或电动伺服作动筒,模拟真实的道路载荷。
3D坐标测量机
场景描述:对工件进行高精度三维尺寸测量。
EtherCAT优势:高分辨率的位置反馈通过EtherCAT实时传回,结合精确的触发信号,确保测量数据的准确性和重复性。
舞台机械与特效设备
场景描述:控制剧院中升降舞台、移动屏幕、灯光位置。
EtherCAT优势:多轴同步实现复杂、流畅的群体动作。开放协议便于与第三方演出控制系统集成,实现精准的声光电同步。
大型3D打印机(增材制造)
场景描述:工业级的大尺寸、多材料3D打印设备。
EtherCAT优势:同步控制多个打印头、移动轴和辅助设备(如加热床),确保打印路径的精确和不同材料的协同挤出。
智能农业机械
场景描述:大型联合收割机或播种机。
EtherCAT优势:通过IP67等级的从站模块,将分布广泛的传感器(流量、湿度、产量)和执行器(阀门、电机)可靠地连接起来,实现精准农业和自动驾驶。
总结:其实总结ethercat在运动控制和同步运动和控制方面有较为突出的优势,主要就是这种方向,可以自行去挖掘这方面需求的用户
五、ARM XY 搭载IGHEtherCAT主站作用
EtherCAT 主站是网络中唯一主动发起通信的控制器。它的核心作用可以概括为:组织、调度、同步和管理整个 EtherCAT 网络的数据流和设备状态。
1、数据帧的发起与终结
主站是网络中唯一生成和发送初始 EtherCAT 数据帧的设备。这个帧会依次穿过所有从站。
当帧经过所有从站并返回主站时,主站负责读取和处理帧中包含的所有输入数据。
2、网络周期的主时钟
主站拥有系统的主时钟,并通过分布式时钟(DC)机制来精确校准所有从站的本地时钟。
这是实现纳秒级同步精度的基础,确保了网络上成百上千个设备能在同一时间基准下工作。
3、过程数据映射的管理者
主站负责定义和管理过程数据映射。这是一个虚拟的数据区域,主站将每个从站的输入和输出数据在内存中分配到特定的地址。
在每个通信周期中,主站会自动将输出数据打包到数据帧的对应位置,并从帧的对应位置解析出输入数据。对用户程序来说,这就像在读写本地内存一样简单。
4、网络状态机的主控者
EtherCAT 网络有一个明确的状态机:Init -> Pre-Operational -> Safe-Operational -> Operational。
主站负责控制和推进所有从站的状态。只有在“Operational”状态下,才能进行过程数据的循环通信。
5、从站的配置与诊断
主站在上电或运行时,会读取每个从站的ESI文件,了解其身份和功能。
主站负责配置从站的参数(如分布式时钟、同步管理器等)。
主站持续监控网络状态,实时诊断通信错误、从站丢失或看门狗超时等故障,并做出响应。
六、ARM XY 上IGHEtherCAT主站使用方法
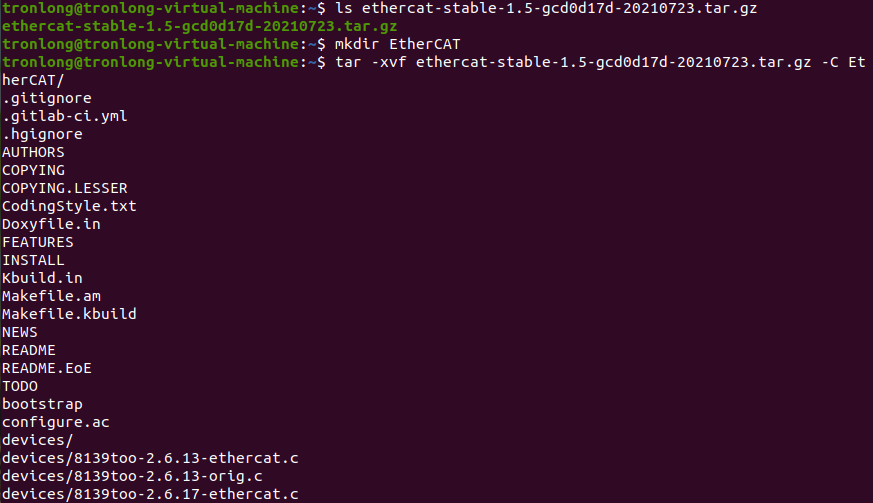
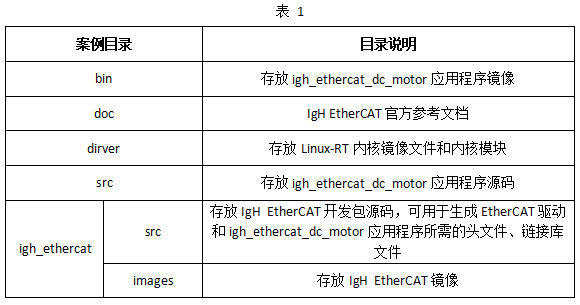
说明:目前igh ethercat最新版是1.6.8,使用比较广泛的是1.5.2版本,目前这两种版本我们都支持,如果需要其他版本都可以移植,以1.6.8版本为例(已经交叉编译过的ethercat主站程序):

注意是必须是RT linux内核,以T507为例子,将编译好的master驱动模块和网卡驱动模块分别加载进内核,MAC地址为eth1网卡地址,注意加载的先后顺序,然后设置库的环境变量,如果已经将库放入/usr/lib这种已经包含的系统环境变量目录里面则省略。因为我已经提前将设备连接,这时已经扫描到了从站0,处于PREOP的预操作状态,需要用户自行根据ESI文件去做PDO过程数据分配操作。

根据从站的twincCAT的ESI配置文件,可以调用igh ethercat的接口

配置PDO,和ESI文件一致

调用一些基础的接口做一些初始化操作,并使用RT linux的API接口将任务优先级提高

在主循环中检测输入开关的变化,控制从站两个LED灯的开和熄灭(程序逻辑为检测输入IO,接通打开灯,断开关闭灯)。交叉编译程序后上传到我们的ARM XY上运行现象如下
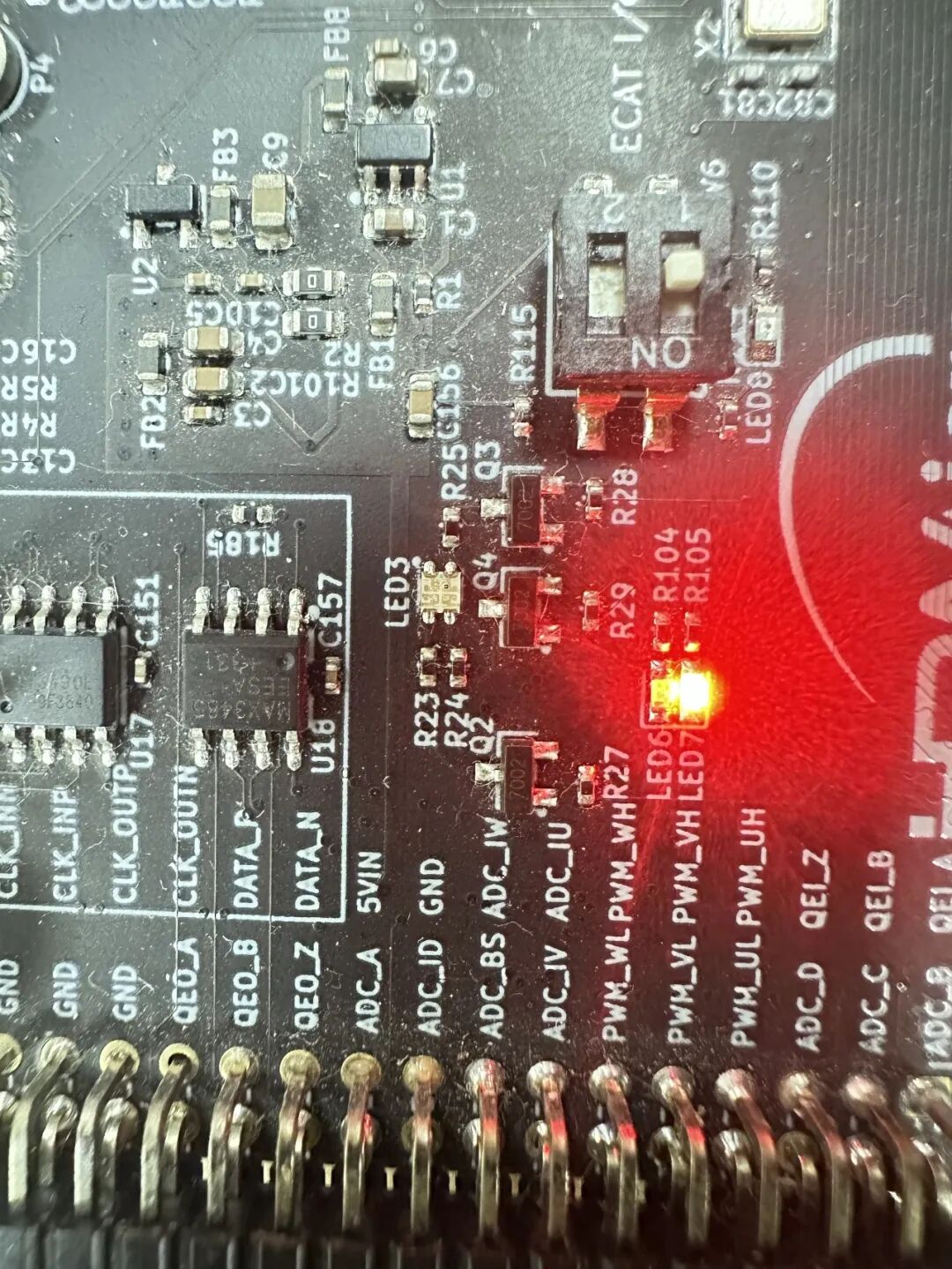

现象:可以看到开关在不在ON的时候两个灯都是熄灭的,在开关在ON的时候两个灯都为打开状态。
七、BL217从站
略...
目前从站耦合器也已经完成,使用BL210系列的相同的IO模块,说明文档另行查阅或询问测试人员
审核编辑 黄宇
-
plc
+关注
关注
5052文章
14803浏览量
488531 -
ethercat
+关注
关注
20文章
1580浏览量
46112
发布评论请先 登录
全兼容·真实时·稳如磐石:EtherCAT转Modbus网关赋能医药高端制造

拒绝卡顿,触觉智能RK3562核心板成功实现2秒级疾速启动,响应快到离谱!

DR1M90 开源 IgH EtherCAT 主站案例:伺服电机正反转实时控制方案
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
基于BL350与IGH EtherCAT的硬实时控制解决方案
ARMxy控制器 + IGH EtherCAT:50大实时控制场景,赋能工业4.0柔性制造
【米尔RK3506国产开发板评测】3、实时补丁以及EtherCAT IGH移植
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—IgH EtherCAT主站开发案例(下)
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—IgH EtherCAT主站开发案例(上)
如何米尔RK3576开发板上移植EtherCAT Igh
【米尔NXP i.MX 91开发板评测】移植运行IGH EtherCAT主站
国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—IgH EtherCAT主站开发案例



评论