完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 运动控制
运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置或速度。
文章:562个 浏览:34293次 帖子:75个

IMU P/N 616-4042在卡特彼勒装载机与挖掘机中的精准运动控制与可靠性实践
IMU P/N 616-4042通过PWM输出和工业级接插件设计,为卡特彼勒装载机、挖掘机提供精准的姿态监测。其可部署于动臂、斗杆等关键部位,实时反馈设...
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
在工业自动化领域,运动控制的精度和稳定性直接决定了生产效率和产品质量。近日,睿擎SDKV1.5.0版本重磅发布,其中EtherCAT多轴控制技术的升级尤...

大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机...

电动静液作动器(EHA)作为现代高精度运动控制领域的革命性技术,正深刻重塑航空航天作动系统的格局。它摒弃了传统液压系统庞大的中央泵站、冗长的管路和易泄漏...
电动静液作动器(EHA)技术解析:现代高精度运动控制的革命性突破
在现代工业与高端装备制造领域,高精度运动控制技术的进步一直是推动行业发展的核心动力之一。电动静液伺服作动器(Electro-HydrostaticAct...

TMC5041:单芯片双轴步进电机驱控方案,赋能精密静音运动控制
前言在现代工业自动化、消费电子等领域,步进电机的多轴协同控制需求日益凸显——既要实现双轴独立的高精度定位,又需兼顾紧凑型设计与静音运行。德国Trinam...
TMC2300步进驱动IC深度解析:从静音到节能,超小尺寸赋能物联网
前言在“万物互联”的智能物联网时代,便携电子设备、物联网终端及电池供电系统正加速渗透生活与工业场景,市场物联网设备对步进驱动方案的“低功耗长续航、小尺寸...
ADI TMC8100 通用编码器总线控制器:高精度运动控制的位置反馈核心方案
前言在工业自动化、协作机器人、智能物流等多个领域,伺服系统的高精度位置反馈直接决定设备运动控制精度与可靠性。传统编码器接口方案通常带有协议兼容性差、通信...

边聊安全 | 以L3级自动驾驶为例,详解DDT、DDT Fallback、MRC、MRM概念
以L3级自动驾驶为例,详解DDT、DDTFallback、MRC、MRM概念写在前面:在自动驾驶技术迅猛发展的今天,动态驾驶任务(DDT)及其后备(DD...

基于RT-Thread与K230(玄铁C908)的运动目标控制与追踪系统 | 技术集结
题目:运动目标控制与追踪系统本项目基于K230平台实现运动目标位置复位、屏幕边框巡航、胶带正方形巡航、数字8循迹演示;并预留自动追踪红色光斑的扩展接口。...

AWStudio:轻松设置EtherCAT分布式时钟,提升同步精度!
在EtherCAT系统中,确保各从站设备的时钟同步是实现精确控制的关键。本期我们将探讨AWStudio运动控制版如何通过分布式时钟同步机制,解决时钟不一...
上期我们探讨了AWStudio运动控制版的EtherCAT配置功能,这期我们将聚焦于其强大的诊断与监控工具,看看它是如何帮助开发者实时掌握网络状态并快速...

宏集干货 | 手把手教你通过CODESYS V3进行PLC编程
宏集MC系列模块化控制器是基于RaspberryPi的高性能4核控制器,运动控制循环时间最快可达500微秒,实现了计算能力和成本之间的最佳平衡,适用于多...
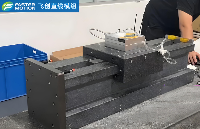
在现代工业自动化与精密制造领域,运动控制技术的精度与效率直接决定着产品质量与生产效能。其中,磁悬浮直线模组作为一种融合了磁力驱动与无接触运动优势的新型传...
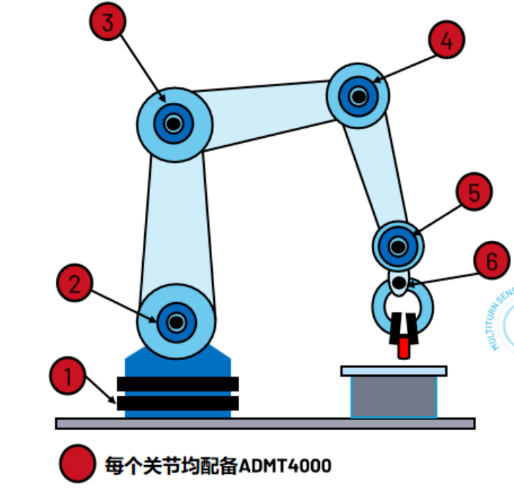
ADI ADMT4000磁性位置传感器助力人形机器人关节设计
人形机器人作为集成了机械制造、控制技术与人工智能等多学科的复杂系统,其运动控制的精确性与可靠性是衡量其性能的核心指标。其中,关节的绝对位置感知,特别是在...

伺服电机的运行需要一个参考点,这个参考点就是原点。原点通常是由光电开关或机械开关来确定的,其位置是固定的。当伺服电机运行时,控制器会根据原点的位置来计算...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1