简单来说,SLAM是指机器人依靠自身传感器在未知环境中获得感知信息,递增地创建周围环境的地图,同时利用创建的地图实现自主定位。
2016-02-16 11:38:36 20515
20515 其中,SLAM算法插件提供了SLAM领域流行的优秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,这些插件可以直接集成到自己的代码中,研究人员也可以基于这些插件进行进一步研究或者贡献自己的插件。此外Rviz也被集成到了这一框架中进行可视化交互,让用户可以复用ros中的技能和知识。
2019-03-07 09:42:597901 
本文提出了一个鲁棒且快速的多模态语义 SLAM 框架,旨在解决复杂和动态环境中的 SLAM 问题。具体来说,将仅几何聚类和视觉语义信息相结合,以减少由于小尺度对象、遮挡和运动模糊导致的分割误差的影响。
2022-08-31 09:39:141302 视觉惯性里程计和SLAM算法广泛应用于各种领域,如服务机器人、无人机和自主车辆。大多数SLAM算法都是基于静态环境假设。然而,在现实世界中,存在各种动态对象,并且它们降低了姿态估计精度。
2022-09-14 16:22:24785 相较于激光雷达SLAM系统,视觉SLAM系统具有不主动发出信号的优点。此外,视觉是对环境的稠密感知,可以利用视觉特征构建出更符合人类感知的环境地图。
2022-12-21 16:18:092454 本文的优势不仅包括讨论A-SLAM的内部组成部分,还包括其应用领域、局限性和未来前景,以及对过去十年A-SLAM进行全面的统计调查。
2023-03-17 10:44:57504 上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“视觉SLAM:一直在
2023-08-21 10:02:071575 
激光SLAM局部定位精度高但全局定位能力差且对环境特征不敏感,而视觉SLAM全局定位能力好但局部定位相对激光雷达较差,两者融合可以提高SLAM系统的精度和鲁棒性。
2023-10-23 11:01:14650 
神经隐式表示已经被探索用于增强视觉SLAM掩码算法,特别是在提供高保真的密集地图方面。
2024-01-17 10:39:50442 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容单目相机和双目相机。LSD-SLAM是一种基于光流跟踪的直接法SLAM,但是实现了半稠密建图,建图规模大,可以在线实时运行。
2024-02-26 09:41:50272 
和即时定位问题,而自主导航需要解决的是智能移动机器人与环境进行自主交互,尤其是点到点自主移动的问题,这需要更多的技术支持。 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划
2018-08-24 16:56:24
的SLAM 3.0 算是提升机器人回环检测能力的一大突破。 SLAM 3.0采用图优化的方式进行建图,进行了图片集成与优化处理,当机器人运动到已经探索过的原环境时,SLAM 3.0可依赖内部的拓扑图进行
2019-03-06 15:38:04
结合激光雷达或者摄像头的方法,让扫地机可以高效绘制室内地图,智能分析和规划扫地环境,成功让自己步入了智能导航的阵列。除了扫地机之外,SLAM技术在其他服务机器人(例如商场导购机器人、银行机器人
2018-12-06 10:25:32
作为辅助。 AR AR通过电脑技术,将虚拟的信息应用到真实世界,真实的环境和虚拟的物体实时地叠加到了同一个画面或空间同时存在。这一画面的实现,离不开SLAM技术的实时定位。虽然在AR行业有很多可代替技术,但是,SLAM技术是最理想的定位导航技术。
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入SLAM的坑!心中
2021-08-30 06:13:31
什么是回环检测?在讲解回环检测前,我们先来了解下回环的概念。在视觉SLAM问题中,位姿的估计往往是一个递推的过程,即由上一帧位姿解算当前帧位姿,因此其中的误差便这样一帧一帧的传递下去,也就是我们
2018-10-23 17:47:22
浅谈FPGA在安全产品中有哪些应用?
2021-05-08 06:36:39
浅谈UWB与WMAN无线电系统的验证
2021-06-02 06:07:49
浅谈三层架构原理
2022-01-16 09:14:46
浅谈低成本智能手机的发展
2021-06-01 06:34:33
浅谈电子三防漆对PCB板的作用有哪些?
2023-04-14 14:36:27
是激光雷达+SLAM的定位导航技术。 SLAM表示在不具备周围环境信息的前提下,让移动机器人在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建周围环境地图。SLAM可以提高
2018-11-09 15:59:01
HOOFR SLAM System: An Embedded Vision SLAM Algorithm and Its Hardware-Software Mapping-Based
2021-12-21 06:35:49
JNI是什么?如何配置JNI环境?
2022-03-02 07:25:32
文档版本V1.0.0文章目录第一部分 SIMcom嵌入式Linux平台通用配置1. 1 开发环境中的必要脚本1.1.1 SIMcom提供的备份脚本1.1.2 ibeelink提供的备份脚本1.1.3
2021-12-15 08:41:48
什么是数码功放?浅谈数码功放
2021-06-07 06:06:15
放置到虚拟环境中,使用gmapping 和 hector_slam功能包实现SLAM仿真。在第一题建立完成的地图上,实现基于move_base和amcl功能包的机器人自主导航仿真。源码可在git...
2021-12-17 07:06:59
的地图很困难,甚至是不可能的。这时机器人需要在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。而SLAM(同步定位与地图构建),就被认为是实现真正全自主移动机器人
2017-09-21 14:26:44
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于视觉的slam自动驾驶,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、自动控制
2021-08-09 09:37:34
嵌入式系统开发与应用——基于视觉的机器人SLAM入门实践1一、OpenCV的安装与配置1. 下载OpenCV3.4.1并解压到ubuntu相应目录上2. 下载安装依赖库和编译工具cmake(1)更新
2021-12-16 08:16:12
如何配置ARM开发环境?ADS开发环境如何安装?EasyJTAG-H仿真器安装有哪些步骤
2021-04-02 06:23:59
如何在Libero的开发环境下封装通用的自定义的IP核?请各位大侠指点!
2019-11-13 23:09:18
如何实现基于RK3399开发板的cartographer激光SLAM建图模块的设计?
2022-03-07 07:05:11
大家好,我想学习SLAM技术有资深的老师愿意教我吗?qq:496397940
2018-11-09 13:42:27
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
机器人定位导航中,目前主要涉及到激光SLAM与视觉SLAM,激光SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?视觉VSLAM又是什么?激光SLAM和视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
视觉SLAM——特征点法与直接法对比以及主流开源方案对比 ORB LSD SVO DSO
2020-06-02 16:56:49
【总结】视觉SLAM笔记整理
2020-07-17 14:05:20
过程中调整了图结构中每个节点的pose和对应的传感器信息以及所有关键点构建的位姿关系图,利用全部的机器人位姿信息和对应传感器数据生成环境地图。 SLAM 3.0 编码了机器人在SLAM过程中的位
2019-01-21 10:57:46
就音频放大器的类别而言,已不限于A类(甲类)和AB类(甲乙类),而出现了更多类别的放大器。那么常见的音频放大器有哪些类别?
2021-04-02 07:32:17
实现单目视觉同时定位与建图(SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其SLAM算法可扩展性强,可以精确逼近真实单目视觉SLAM过程。以方便SLAM算法的研究为目标,提
2009-04-15 08:50:37 82
82 太网通用配置软件ZNetCom 2.66
2010-04-22 16:50:2792 其实,IAR编译环境的配置是相当重要的,没配置正确或者不符合自己的习惯的话,使用起来就会很麻烦。下面我根据网上的经验和资料,以及自己摸索和大家共同探讨下IAR的配置。
2010-08-29 09:09:51101 无类别域间路由,什么是无类别域间路由
在20世纪90年代初期,因特网管理者开始解决IP地址空间耗尽的潜在问题。CIDR(读作“cider”)是一个解决方
2010-04-06 17:26:142636 针对同步定位与地图构建SLAM(Simultaneous Localization and Mapping)算法中,单个传感器提供的信息受到传感器本身特性和周围环境制约的局限性,提出了在仅声纳更新的SLAM算法同时,引入航向
2013-09-25 16:08:4048 基于扩展卡尔曼滤波的SLAM算法相关代码。
2016-03-22 14:11:1434 《OpenCV3编程入门》书本配套源代码:OpenCV开发环境的配置
2016-06-06 15:20:548 Java环境变量配置
2017-07-24 11:39:210 关于phpstorm配置php开发环境,大多数资料都是直接推荐安装wapmserver。而对于如何配置自定义的PHP环境和Apache则很少提到。本文就是说明如何在phpstorm中配置已经安装好的PHP与apache。
2017-11-19 12:53:038740 
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机
2017-11-22 11:52:333 针对复杂环境下机器人的同时定位与地图构建( SLAM)存在实时性与鲁棒性下降等问题,将一种基于ORB特征点的关键帧闭环检测匹配算法应用到定位与地图构建巾。研究并分析了特征点提取与描述符建立
2018-03-26 10:57:326 高仙的SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义SLAM。高仙SLAM2.0技术方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:308535 SLAM要实现定位和制图,第一步就是采集数据,而采集数据的关键就是传感器,可以说没有传感器就没有SLAM。而SLAM上的传感器种类多样,目前主流的我们可以将其分为两大类:激光雷达和摄像头。
2018-07-17 16:59:0232392 SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。
2018-11-14 08:54:017334 事儿。视觉SLAM是什么?视觉SLAM主要是基于相机来完成环境的感知工作,相对而言,相机成本较低,容易放到商品硬件上,且图像信息丰富,因此视觉SLAM也备受关注。目前,视觉SLAM可分为单目、双目
2019-08-09 17:31:201430 事儿。视觉SLAM是什么?视觉SLAM主要是基于相机来完成环境的感知工作,相对而言,相机成本较低,容易放到商品硬件上,且图像信息丰富,因此视觉SLAM也备受关注。目前,视觉SLAM可分为单目、双目
2019-09-11 22:01:351759 运动恢复结构(SfM)和 SLAM 所解决的问题非常相似,但 SfM 传统上是以离线形式进行的,而 SLAM 则已经慢慢走向了低功耗/实时/单 RGB 相机的运行模式。
2019-11-22 14:34:0716984 
来看,2011年至2019年,SLAM一词的搜索热度就一直处于稳步增长状态。SLAM搜索热度(来源百度指数)SLAM意为“即时定位与地图构建”,它是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境
2019-11-27 12:12:453731 ,就相当于人类失去了双眼一样。 一、什么是视觉SLAM? SLAM的英文全称是Simultaneous Localization and Mapping,中文称作「即时定位与地图创建」,而视觉SLAM就是用摄像头来完成环境的感知工作。 举个例子,当你第一天去上大学的时候,为了迅速熟悉校园环境并且找到
2020-04-17 09:21:4153848 在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53:3016068 
SLAM技术是一种计算机程序,用于构建座席周围环境的虚拟地图并更新其实时坐标。
2021-01-22 14:55:0018670 SLAM这个“名字”逐渐被更多的人所熟悉,但是SLAM具体是什么、SLAM有哪些应用领域、激光SLAM和视觉SLAM哪种方式更有优势等等这些问题却总是模糊不清。
2020-12-26 09:39:322084 定位技术是机器人实现自主定位导航的最基本环节,是机器人在二维工作环境中相对于全局坐标的位置及其本身的姿态。目前SLAM (Simultaneous Localization and Mapping即时定位与地图构建)是业内主流的定位技术,有激光SLAM和视觉SLAM之分。
2020-12-26 10:59:431286 SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉 SLAM”。
2021-03-20 09:13:123818 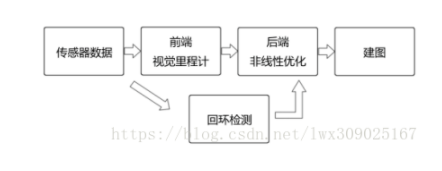
,使重釆样后的粒子保持多样性。结合似然域模型与意外对象观测概率,使激光测量模型更好地反映真实环境。实验结果表明,改进的重釆样方法定位效果较好,相对原激光SLAM算法,改进的激光SLAM算法在动态环境中的建图和定位精度更高。
2021-04-01 10:48:316 SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
2021-04-18 10:15:204643 
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2021-04-18 10:18:1212157 
课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
我看来,vslam得发展也就是从MonoSLAM->PTAM->图优化SLAM->ORB-SLAM为代表的现代slam,其中可能还有许多内容,不过这些开源SLAM一定程度上体现了SLAM发展过程了....
2021-06-18 10:40:521357 
SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图
2021-08-26 16:07:316792 Openwrt通用固件 make menuconfig配置教程
2021-09-07 12:01:053 SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图
2021-10-13 10:38:382335 ./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-02 15:02:32747 视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-29 21:38:37627 (Visual SLAM,VSLAM)是将图像作为主要环境感知信息源的SLAM系统,VSLAM以计算相机位姿为主要目标,通过多视几何方法构建3D地图[4]
2022-12-02 15:00:281149 SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉 SLAM”。
2022-12-05 10:16:311248 手持SLAM设备最大的特点肯定要放到手持这个动作上面,由于SLAM算法的优越性,手持可以做到走到哪里测到哪里。
2022-12-27 10:43:413287 自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。视觉 SLAM (Simultaneous Localization And Mapping) 利用视觉传感器获取环境图像信息,基于多视图几何算法构建环境地图。
2023-01-16 10:58:292085 视觉里程计最近几年越来越受到学术界以及工业界的认可,以ORB和VINS为代表的视觉SLAM已经可以满足绝大多数场景,而OV2SLAM在其他VSLAM中脱颖而出,其实时性以及具体的回环性能在测试中都得到了认可。
2023-03-21 17:16:31768 一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2023-03-27 11:06:561385 很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
2023-05-09 14:25:14638 
用在SLAM上的传感器主要可分为两大类,一种是激光雷达,而另一种是摄像头,为此,业内人士也将SLAM分为激光SLAM和视觉SLAM。激光SLAM比视觉SLAM起步早,在理论、技术和产品落地上都相对成熟。
2022-02-15 19:15:241850 
近日,全国SLAM技术论坛于厦门大学举办。本次论坛聚焦SLAM和相关技术的前沿发展以及在应用领域的行业机会,旨在为SLAM技术和应用领域搭建全方位展示与交流平台,推动国内SLAM技术的发展以及产学研
2023-08-01 09:37:23526 SLAM至今已历经三十多年的研究,这里给出经典视觉SLAM框架,这个框架本身及其包含的算法已经基本定型,并且已经在许多视觉程序库和机器人程序库中提供。
2023-08-10 14:15:53410 
激光雷达是最古老,研究也最多的SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现SLAM、避障等功能。
2023-08-16 10:31:081895 
大多数现有的视觉SLAM方法严重依赖于静态世界假设,在动态环境中很容易失效。本文提出了一个动态环境下的实时语义RGB-D SLAM系统,该系统能够检测已知和未知的运动物体。为了减少计算成本,其只对
2023-08-25 16:49:47274 
近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊视觉SLAM的那些事儿。
2023-09-05 09:31:111389 
GO-SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-SLAM这些SOTA方案,GO-SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。
2023-09-11 10:03:29685 
SLAM(Simultaneous Localization and Mapping)同步定位与地图构建,一种同时实现设备自身定位和环境地图构建的技术。
2023-09-20 10:59:591060 
理解,SLAM的主要功能就是让机器人一边计算自身位置,一边构建环境地图,这两个过程相辅相成。可以说,SLAM技术是机器人后续自主行动和实现交互的基础,SLAM也被认
2023-11-25 08:23:57999 
激光 SLAM 任务是搭载激光雷达的主体于运动中估计自身的位姿,同时建立周围的环境地图。而准确的定位需要精确的地图,精确的地图则来自于准确的定位,定位侧重自身位姿估计,建图侧重外部环境重建。
2024-03-04 11:25:04100 
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论