 基于三维激光数据的层级式SLAM方法
基于三维激光数据的层级式SLAM方法

近日,机器视觉顶刊IEEE Transactions on Pattern Analysis and Machine Intelligence(《模式分析与机器智能汇刊》IF=17.86)在线发表了遥感信息工程学院青年教师李加元(特聘副研究员)课题组研究成果,该研究实现了激光扫描视觉特征级点云高精度自动配准技术。
论文题为“A Practical O (N2) Outlier Removal Method for Correspondence-based Point Cloud Registration”(适用于特征级点云配准的实用粗差剔除方法)。研究工作针对特征级点云配准中高粗差比率问题(误匹配率>95%),定义了匹配矩阵与扩展匹配矩阵概念,构建了非满秩约束下行列式最小化代价函数模型,基于边界理论实现了粗差匹配自动检测,并提出了尺度自适应柯西稳健估计模型,实现了99%误匹配率下点云数据高效高精度全自动配准拼接。
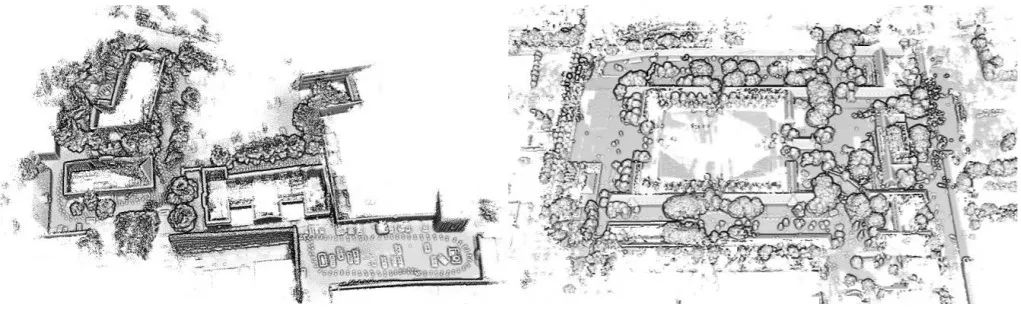
多站点云自动配准建图效果
课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。KITTI链接:
http://www.cvlibs.net/datasets/kitti/eval_odometry.php(名称HMLO-whu)
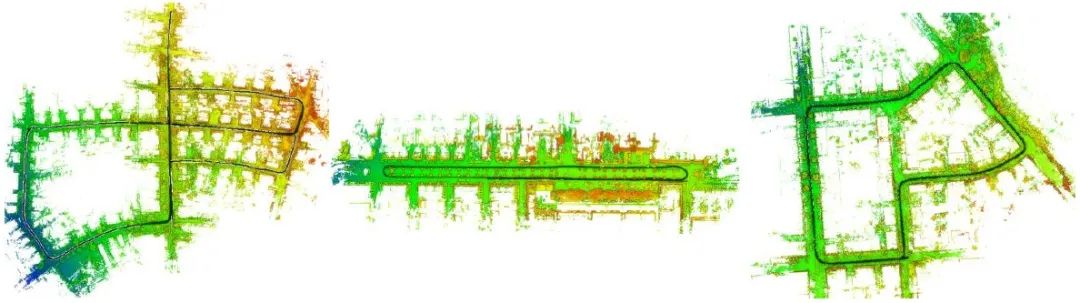
纯激光定位与建图效果
近年来,在国家自然科学基金、国家重点研发计划、博士后创新人才计划等项目的资助下,李加元博士致力于智能无人系统自主导航定位与建图中的关键技术研究,取得了系列研究成果,在IEEE Transactions on Image Processing, ISPRS Journal of Photogrammetry and Remote Sensing, IEEE Transactions on Geoscience and Remote Sensing,《测绘学报》等计算机视觉、图像处理、摄影测量与遥感领域的知名期刊发表论文将近30篇,曾获美国摄影测量与遥感学会学术金奖。研究工作攻克了大几何与大辐射畸变影像匹配、高粗差比率稳健估计、高可靠性特征级激光点云自动配准等一系列技术壁垒,形成了视觉与激光SLAM理论和方法,完成了智能无人系统高精度自主定位导航的若干关键技术积累。
责任编辑:lq
-
自动检测
+关注
关注
0文章
121浏览量
16434 -
SLAM
+关注
关注
24文章
461浏览量
33465 -
激光视觉
+关注
关注
0文章
9浏览量
6172
原文标题:武汉大学在激光视觉导航领域取得新进展
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
VirtualLab:光学系统的三维可视化
沉船残骸、古代港口遗址的光学三维扫描测量逆向-激光三维扫描仪

【OFDR】实时感知、动态重构与历史状态回溯!昊衡科技-三维场重构软件

OFDR技术与三维重构的协同价值

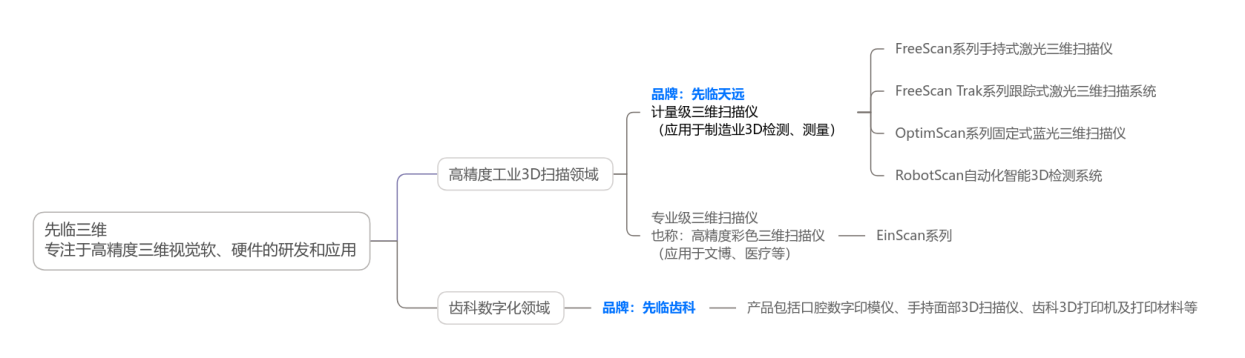
一文读懂 | 三维视觉领域国家级制造业单项冠军——先临三维的品牌布局
复杂曲面零件的光学三维扫描测量逆向 - 激光三维扫描仪
蔡司三维扫描仪第三方代抄数检测机构

UCL360系列毫米级架站式三维激光扫描仪的价值何在?
为何激光三维扫描无需喷粉也能精准测量高反光物体?—— 基于光学抗反射技术的突破
航天宏图全栈式3DGS实景三维重建系统解决方案

从 “必须喷粉” 到 “无粉测量”:激光三维扫描技术在高反光表面测量中的革命性突破
激光三维扫描技术:无喷粉条件下高反光表面三维重建的光学原理与应用
非接触式激光三维扫描应对镜面反射表面的无喷粉测量方案:原理与创新




评论