仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,这些关节要连接在一起,进行统一的协调控制,就对控制系统的可靠性、实时性提出了更高的要求,以往采用
2014-11-18 11:40:57 1531
1531 
要求用开疆智能Modbus转profinet网关连接ES-R6六轴关节机器人控制系统与PLC的配置,通过Modbus转profinet网关控制ES-R6六轴关节机器人控制系统。
2023-10-25 18:00:21587 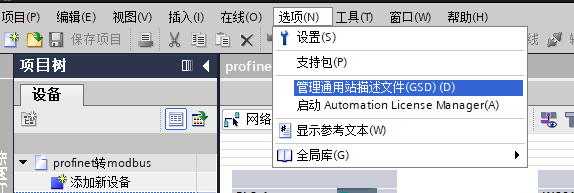
针对覆冰机器人行走和除冰时的直流无刷电机控制系统。经分析,该系统不仅成本低、易于实现,且性能稳定、方便扩展,对工程实践和电机调速具有重要意义。
2011-09-28 17:47:13
有大神教一下小白吗???有个难题一直困扰着,怎么可以实现对dsp控制系统进行数据采集,比如:控制手柄按一下正转、反转,怎么能让电脑显示你按的是正反转,电机也是否是正反转。
2017-05-27 10:50:41
,代替人手进行抓取、转移工件或料理东西的机电一体化自动装置。仿生机械手一般用什么电机?超声电机作为一种新型的微电机,不像传统的电机那样,利用电磁的交叉力来获得其运动和力矩。超声电机则是利用压电陶瓷
2021-07-13 13:59:58
本设计主要研究的是小型仿生六足机器人控制系统的开发,其采用自主设计的控制器作为硬件平台。控制器主要有微处理器、驱动模块、电源模块、外围扩展构成。其中驱动模块采用了分时复用的原理,将处理器的 3 路
2020-10-13 09:13:11
本菜鸟刚学机器人控制,对于两关节机器人,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
2015-04-29 16:21:23
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:ABB
2021-09-08 07:44:15
HCTL-2020 解码器及其在多关节机器人运动控制中的应用编码器位置检测通道的扩展是多轴运动控制系统开发中经常遇到的技术问题。该文详细介绍了HCTL -2020 解码器的工作原理,设计了它与DSP
2009-12-17 16:12:31
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
项目名称:基于外骨骼的仿生机器人控制系统试用计划:1.申请理由本人为电子在专业在校学生,以智能机器人为研究方向,参加了许多区级国家级比赛并获奖,想要借助发烧友的智能语音开发板进行深入的学习和探索,并
2020-02-25 16:01:04
提出自组织自学习、多目标协同控制新方法。目前研究重点是:完善“微动力仿生机器鱼”和研发其它的水产和海洋生物生态系统信息采集硬件平台,深入研究相关的图像处理、冲突目标协调解获取、建模分析调节技术与算法,在水产养殖、海洋水质资源保护、海洋牧场等多个领域发挥作用。
2015-07-26 13:14:12
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
题目是基于DSP的三关节机械臂轨迹跟踪控制系统设计主要任务是以DSP-TMS320F2812控制器作为机械臂底层驱动控制器,编写机械臂运动控制驱动代码;然后利用目标跟踪算法,结合实验平台,实现机械臂
2017-04-10 21:42:39
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
`大自然是最优秀的设计师。工程师们从大自然学习经验,将其运用在工程上,这就是仿生学。仿动物的机器人能帮助研究者理解动物的运动和进化,以及为什么它们能完成如此惊人的任务。除此之外,仿生机器人还有
2016-08-24 10:33:05
本帖最后由 红尘。破 于 2016-8-19 14:59 编辑
今天整理资料时发现了一年前做的四足仿生机器人,当时买了一个四足仿生机器人的骨架,画了个板子,写了个测试代码,能完成简单的行走,后面加了避障、显示功能啥的,不过视频资料没了,只有简单行走的视频,优酷链接在下面评论
2016-08-19 14:59:33
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
2021-09-15 06:54:01
会受一定的影响。?本文所提出的基于DSP+FPGA的控制系统方案,利用FPGA的容量大、可编程实现很多功能,结合DSP具有高速的信息处理能力的特点,使得本控制系统非常简洁,结构灵活,通用性强,系统也易于维护和扩展。该方案基于软件无线电的思想,是采用通用平台的设计。?
2019-07-29 06:08:47
仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时
2019-07-26 08:25:28
题目:基于DSP的智能交通控制系统
2014-05-24 11:32:12
先进的马达控制系统可实现马达与硅芯片技术以及软件的高度集成,以便在提升性能的同时显著节约成本。先进控制器采用的高级技术可提高性能与马达驱动的工作特性。基于数字信号处理器 (DSP) 的新型可编程
2012-11-28 15:36:19
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
非常高。特别是消费领域的机器人,例如扫地机器人,楼宇内消毒和地铁巡检机器人等。这些领域的底盘结构基本上均采用更为灵活,相比仿生机器人更为可靠和实现容易的麦轮结构。实现功能8路PWM输出底盘全向运动整体
2022-08-17 14:50:12
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
远程操控仿生机械手抓取实物。仿生机械手控制系统硬件设计仿生机械手控制系统硬件设计图数据手套软件控制设计 ...
2022-01-07 06:55:18
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
工业机器人的控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项目,主要功能有示教再现功能和运动控制功能。示教再现控制的主要内容主要包括示教及记忆方式和示教
2017-10-20 10:03:57
有很多小伙伴喜欢在没事的时候鼓捣一些机器人什么的,现在给大家分享一个仿生机器人开源资料,喜欢的小伙伴可以看看。六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态
2020-10-10 09:57:11
`随着中国科学技术发展迅猛,未来中国将成为为微型智能机器人大国。如今智能机器人需求量不断增长,其控制系统和自动化主要的产品超声波电机的需求也将大幅度增长,机器人手指关节用超声波电机作为微型智能机器
2020-11-02 11:21:13
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
气动柔性球关节的模糊PID控制介绍了新型气动柔性球关节,讨论研究其控制方法。综合模糊控制和PID 控制的特点,设计针对气动柔性球关节的模糊PID 控制器,实现对球关节弯曲角度、偏转方向等系统参数
2009-08-08 09:34:49
本文首先介绍了并联型APF的系统结构和工作原理,然后讨论了基于DSP+CPLD的全数字化控制系统的实现方案,并对该控制系统的硬件电路和软件系统设计进行了研究,最后给出了实验波形,验证了控制策略的有效性。
2021-04-22 06:16:02
瑞士联邦理工学院 Pascal Buholzer 和他的学生设计的Sepios水下仿生机器人,解决螺旋桨推进器的水草缠绕和噪音问题。
2015-01-13 15:52:06
`博雅工道研发了一款智能仿生机器鱼,该鱼使用仿生技术,以盒子鱼为原型加以创造具有目标识别、智能跟随、水声遥控、代码开源、防水技术、无线传输、智能存储、PC端调试平台等功能。应用于竞赛、科研、教育创新`
2017-10-25 18:00:18
于机器人控制系统当中。那么今天,我们就通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现。 机器人控制系统 机器人控制系统相当于机器人的大脑,是决定机器人功能和性能的主要部分,它一般分为机器
2023-02-24 17:05:21
龙人六足机器人龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程控制实现12个电机协调的控制行走,实现对六足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:六条腿协调前进、后退、转弯的算法,超声波导航和避障
2016-03-24 16:25:46
本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
2009-05-25 15:57:44 45
45 基于动态方程和Hamilton-Jacobi 原理,从硬件到软件,设计了机器人机械手臂的关节驱动控制系统。主要任务是使该系统的能耗最小化。仿真和实验的结果,证明了该系统的可用性和
2009-05-27 13:10:2659 为实现3-RSS/S 踝关节康复并联机器人的各种康复训练模式,完成了以“PC+PMAC”作为硬件平台的控制系统设计,基于Visual C++6.0 开发了软件系统,经实验取得了满意的效果。关
2009-06-06 14:38:5519 论述了由嵌入式计算机组成的3 层仿人机器人控制系统,并详细介绍了其中的关节控制器。控制系统实行逐级控制,任务分散,提高了机器人的智能化程度。关节控制器选用TM320F2811
2009-08-05 10:51:4424 本文提出一种基于遗传算法优化的模糊控制系统并将之用于五自由度关节型机器人轨迹跟踪控制,该系统将五关节的位置误差和误差变化率作为模糊控制器的输入,输出为五关节
2009-12-18 11:51:2732 针对含有建模误差和不确定干扰的多关节机器人轨迹跟踪控制,提出了一种模糊神经滑模控制方法。该方法采用全局快速终端滑模面,保证了系统能够从任意初始状态在有限时间
2009-12-19 15:19:1312 主要研究了基于新型正交六自由度并联机构设计的仿生型机器马系统的运动学特性。首先分析了机器人的逆运动学方程,然后设计了模糊自适应PID 控制器,最后给出了动平台做一
2009-12-31 15:50:339 定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-18 17:35:19
基于RTW 的DSP 控制系统研究
摘要 提出了一种基于RTW的TMS320F2812 DSP数字控制系统,基于模型的设计流程,实现了工程开发过程从算法设计到最终实现的所有开发阶
2010-04-07 10:18:1737 基于DSP仿人机器人关节控制器设计
0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,
2009-11-24 09:36:491193 
摘要:本文研究了障碍环境下多关节机器人自主实时避碰运动理论、技术与方法.研制的新型红外传感皮肤,可以为多关节机器人提供所需要的周围环境信息.针对非结构化环境下的多关节机器人实时避障问题,提出了一种未知环境下的机器人模糊路径实时规划新方法.实验结
2011-02-08 11:22:0134 摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。 关键
2011-03-01 00:40:0460 仿生机械学!资料来源网络,如有侵权,敬请见谅
2015-11-20 15:16:050 基于DSP的伺服控制系统设计与实现,有兴趣的同学可以下载学习
2016-04-26 18:16:4240 还针对仿生机器鱼的运动特点,利用单片机进行硬件系统设置,其中不仅有遥控发射接收电路,而且还有串行通讯电路和舵机控制等,尽力起来一个完整的硬件控制平台,并且对控制系统做了调试。还设计了控制算法,利用C语言的下位机开发、规划,并且完成了底层动力系统程序的编写及调试。
2016-06-16 16:51:318 多关节灵巧手混合遥操作控制系统_宋小瑛
2017-01-18 20:24:570 基于LPC2131的RF遥控多关节蛇形机器人_李红岩
2017-01-19 21:54:242 得益于人机交互、软体机器人控制、机器人生物行走等新型技术的不断发展,当前世界范围内仿生机器人的研究工作已经取得了一定成果。
2017-02-23 15:29:381104 人特有的机械结构和数学模型,建立一个新型全数字的基于DSP和FPGA的机器人位置伺服控制系统的软、硬件平台,实现对四关节实验室机器人的精确控制。
2017-09-01 11:25:4411 我们今天的文章:机器人控制技术详解: 机器人控制系统的特点 机器人的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其控制系统要比普通的控制系统复杂得多
2017-09-19 18:29:2810 DSP的运动控制系统设计
2017-10-19 14:58:4212 盘点德国仿生机器人,绝对让你佩服得五体投地!
2018-01-02 10:52:529705 随着对于仿生机器人认识的不断深化,人们对其的研究也走向了“第四阶段”:即构建结构与生物特征一体化的类生命系统,强调仿生机器人不仅具有生物的形态特征和运动方式,同时具备生物的自我感知、自我控制等性能特性,更接近生物原型。目前大热仿生脑和仿生神经也属于此类方向。
2018-07-06 15:44:002714 的实际运动步态,规划并设计了静步态及对角小跑两种步态,进行了逆动力学仿真,得到关节等关键部位输出数据。在仿真实验的基础上,设计了液压作动器的关键参数及四足仿生机器人单腿机械结构。
2018-03-01 11:41:123 德国自动化技术厂商Festo(费斯托)推出来自其仿生学习网络 (Bionic Learning Network)最新成果的仿生机器人,BionicWheelBot是一款独具特色的行走机器人,以摩洛哥后翻蜘蛛为灵感,能够模仿摩洛哥后翻蜘蛛以翻滚模式在复杂地形上移动。
2018-03-31 10:08:189722 仿生机器鱼实验平台属于教育部和北京邮电大学共同出资支持的一项“国家级大学生创新性实验计划”项目,是一个集光、机、电、流体、智能于一体的实验平台,研究内容包括:仿生机器鱼机械结构的研究,推荐效率的研究以及控制性能的研究。
2018-06-08 10:16:305176 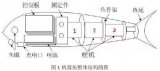
如果20年后科技发展迅速,机器仿生人出现了,你会不会也想购买一台?是否想过新时代会因仿生机器人的出现而有何转变?
2018-08-15 17:34:155709 在YouTube上点击量超高的波士顿动力公司,预计将会在2019年推出结构复杂的仿生机器人。消息一出,人们目光即被拉向了机器人领域一大分支——仿生机器人。
2018-09-28 14:48:165006 仿生机器人就是模仿自然界中生物的外部形状、运动原理和行为方式的系统,能从事生物特点工作的机器人。主要的仿生机器人包括三大类:一是仿人机器人,二是仿生物机器人,三是生物机器人。
2018-12-23 16:19:4811257 韩国国防部日前宣布将研发军用仿生机器人,提升防御与侦察能力,强化武装部队。
2019-06-07 14:44:002552 据报道,韩国国防部日前宣布将研发军用仿生机器人,以提升防御与侦察能力,增强武装部队的战斗力水平。预计这类仿生机器人将于2024年进入到韩国军队服役。
2019-06-10 09:36:272875 这是目前国内研发生产的第一台5G动作传感仿生机器人。它使用新型芯片,将三维空间动态控制、平衡原理与先进的机械设计和尖端电子感知技术相结合,来操纵机器人。
2019-07-22 09:32:153844 控制系统作为四足仿生机器人最重要也是最基础的组成部分,其性能的好坏直接对四足仿生机器人运动控制效果产生巨大的影响。在机器人研究的早期,控制系统一般采用单级处理器的集中控制模式,利用一台运算速度快
2019-09-27 08:00:000 兼具高速度、 高机动和高适应性已成为四足机器人发展的必然趋势, 仿生关节作为重要的基础运动部件, 对四足机器人的运动学和动力学研究具有重要的作用。 从气动柔性的仿生关节、液压减震的仿生关节、 串联
2019-10-09 08:00:008 机器人从结构上讲属于一个空间开链机构,其中各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调,其控制系统较普通的控制系统要复杂得多。
2019-10-13 10:29:0015451 “仿生机器人”是指模仿生物、从事生物特点工作的机器人。同时关于动物如何移动、处理危险和保存能量的特别见解和观察不仅有趣,而且对机器人领域的科学家也很有价值。在德国汉堡举行的IROS年会上,类似动物的机器人运动做出了这样的贡献。
2020-03-05 09:26:313926 码垛机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行。
2020-09-02 14:27:151037 相信我们不少人都听说过仿生机器人,这一产品被称为我们人类的好朋友。那目前它的发展如何呢?
2020-11-10 09:33:477134 及建档系统。 其中,手指外骨骼单元和手套外骨骼专利摘要写到,本实用新型涉及仿生机械技术领域,特别涉及一种手指外骨骼单元和手套外骨骼。本实用新型能够有效增大手套外骨骼的屈伸范围。 关节连接组件、仿生手及仿生机器人专利
2020-11-27 16:04:161779 近日,京东数科海益信息科技有限公司新增多条“仿生机器人”的相关专利信息。该专利名为关节连接组件、仿生手以及仿生机器人;手指外骨骼单元手套外骨骼。
2020-12-06 09:01:002527 按照使用环境的不同,又可以将机器人分为水下仿生机器人,空中仿生机器人和地面仿生机器人。
2020-12-14 16:10:0711853 一台码垛机器人可以完成多个工作人员的劳动量,是企业提升生产效率的重要设备之一,不过选择合适的产品是非常关键的。 水平多关节码垛机的选择方法: 1、高位码垛机速度:水平多关节码垛机的工作速度是表示效率
2021-03-05 15:11:49311 为了降低机器人控制系统的硏发周期和方便操作亼员使用操作,通过对TA6-R5型协作机器人的硏究,设计了基Ethercat和 Twinca仍3的协作机器人控制系统。采用( Denavit-
2021-04-16 14:59:0614 为了降低机器人控制系统的硏发周期和方便操作人员使用操作,通过对TA6-R5型协作机器亼的硏究,设计了基于thereat和 Twincat3的协作机器人控制系统。采用
2021-05-31 10:46:251 机器人关节伺服控制系统设计与仿真
2021-06-22 14:53:1034 多关节四轴机器人码垛机是腾阳为生产线后端包装码垛研发的机器人码垛系统,该码垛系统硬件与专门控制软件相结合,实现从包装线流出的立式包装袋到最后的码垛成型出库,均为全自动化系统。完善的安全联锁机制,可以
2021-10-14 14:54:021827 以及控制性能的研究。
1、仿生机器鱼平台简介:
设计制作的机器鱼模仿鲹科鱼类的外形,头部采用刚性结构的塑料材料。其形状采用流线型,模仿真鱼鱼头的形状和大小比例。在鱼头的内部空间里安装电源及控制电路,...
2022-02-11 17:14:528 小米发布会线上召开,让人没想到的是还发布了一条叫“铁蛋”的仿生四足机器人,不仅能语音对话,机器狗该有的运动功也都具备了,其中让人关注的搭载的环境感知系统,再就是12个机器人关节伺服电机。 铁蛋的12
2022-04-06 14:46:486064 
最近市面上出现多个公司推出的四足仿生机器狗,比如小米的“铁蛋”,小鹏推出的可以骑的机器马,云深处的巡检机器狗,包括国内多家都推出了自己的机器狗型号,在宣传和推荐的同时,大家都在思考和畅想未来的机器
2022-04-07 10:26:383113 
雷军展示全尺寸人形仿生机器人 美好即将发生 小米十二周年之际小米创始人、CEO雷军进行了2022年的重磅年度演讲,雷军展示全尺寸人形仿生机器人;特别让人惊喜的One More Thing:小米
2022-08-12 20:37:091083 
完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。 直坐标机器人 直坐标机器人控制系统 关节机器人 关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最
2022-11-02 14:59:561735 
主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。直坐标机器人控制系统关节机器人关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转
2022-10-27 11:19:41870 
要求用开疆智能Modbus转profinet网关连接ES-R6六轴关节机器人控制系统与PLC的配置,通过Modbus转profinet网关控制ES-R6六轴关节机
2023-10-25 18:25:49408 
搭建机器人关节力控制系统需要以下步骤: 1. 选择合适的电机和传感器。电机的选取要符合机器人的要求,例如扭矩和速度范围。传感器的选择则取决于需要监测的参数,如位置、速度和力量。 2. 编写适当的控制
2023-11-08 17:45:42448 泰科机器人几年前就研判人形机器人赛道将会成为热点,决定研发人形机器人适用的关节模组,经过艰苦的技术攻坚,泰科机器人推出了一系列适用于仿生机器人的轻量化大扭矩一体化关节:MJX系列和DJB系列关节模组,助力客户快速定制开发各类需求的机器人。
2023-11-22 11:12:34328 
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论