 直角坐标机器人&关节机器人的区别详解
直角坐标机器人&关节机器人的区别详解

直角坐标机器人
直角坐标机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。又称大型的直角坐标机器人,也称桁架机器人或龙门式机器人,其工作的行为方式主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。
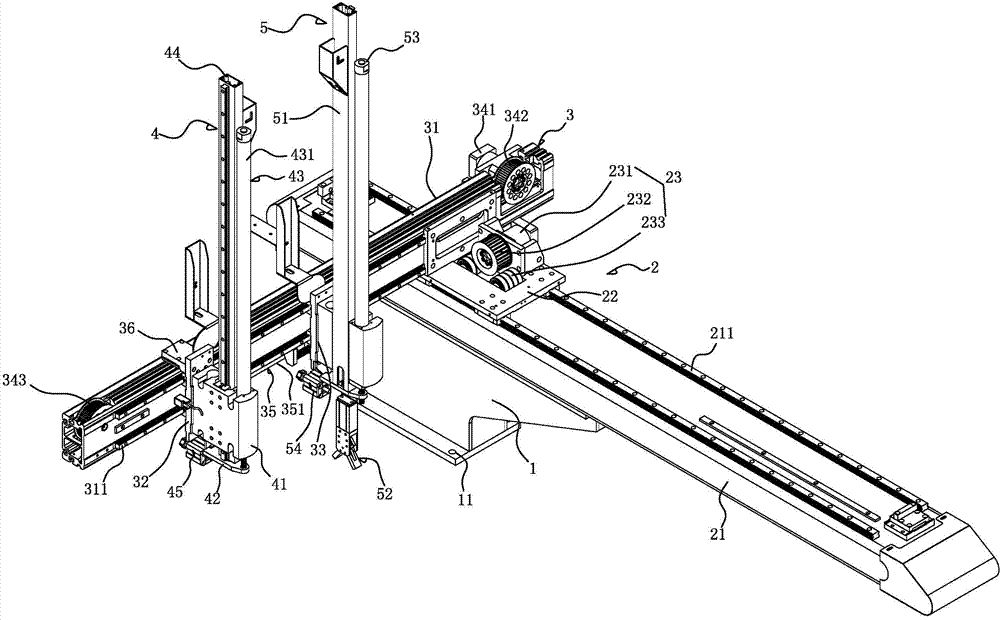

直坐标机器人控制系统
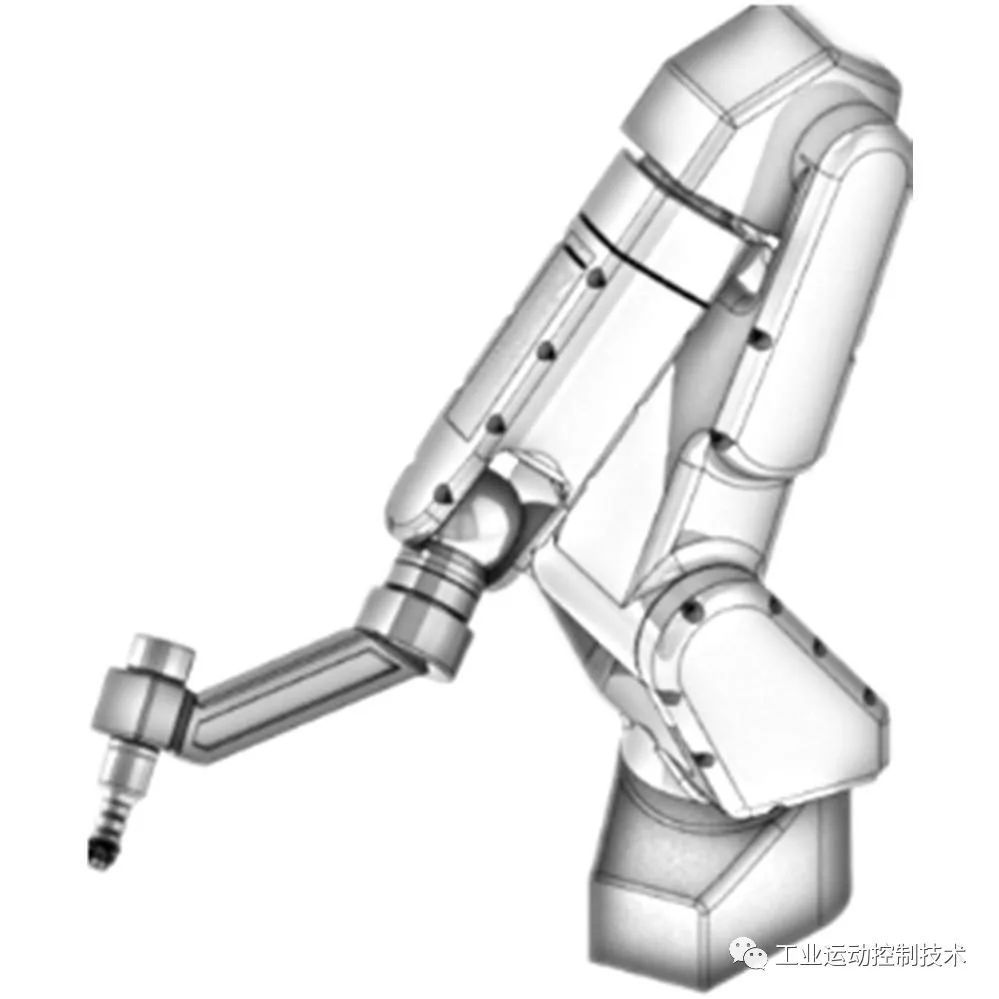
关节机器人
关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。
直角坐标机器人与关节机器人有哪些方面的区别?
一、工作空间与承载能力
1、直角坐标型标准单根长度6m,拼装后可达到100m;组合成龙门式机器人,其工作空间可以是非常的三维立体空间。特殊结构承载可达上吨。
2、关节型最大工作半径3m,在有效半径内可以任何角度工作。承载能力有几种规格可选,但价格及其昂贵。
二、工作精度
1、直角坐标型:由于结构简单,重复定位精度0.05mm,丝杠型可达0.01mm,甚至更高。
2、关节型:重复定位精度0.06mm,轻载荷小半径0.02mm,重载荷精度0.2mm。
三、组合方式
1、直角坐标型组合方式多样,龙门式、悬臂式、壁挂式等,可根据不同的负载、行程、功能及特殊空间要求,为客户订制所需求产品。同时,X、Y、Z三轴基础上可以扩展旋转轴和翻转轴,构成五自由度和六自由度机器人。
2、关节型可细分为6自由度机器人、Scara机器人、四连杆机器人,种类相对少,选择性和灵活性较直角坐标型小很多。
四、软件编程操控和维护
1、从电气系统到上位机直角坐标型都是开放、灵活的。编程简单,用户可以随意扩展,操控简单易操作。简单程序问题和硬件故障,客户可以自行处理,例如更换驱动电机、PLC等,维护费用低。
2、关节型机器人:软件系统集成化,库函数直接调用,是其软件优点。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。
-
机器人
+关注
关注
214文章
31657浏览量
224572
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
驱动机器人革命的"关节引擎",让未来触手可及!

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)

集成多摩川磁性编码器的伺服电机与机器人关节设计创新
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化

【一分钟教程】用ZMC600E实现关节机器人±180度精准转动




评论