轨迹规划则源自机器人研究,通常是说机械臂的路径规划。在无人车领域,轨迹规划的定义感觉不统一。
2018-12-25 09:45:51 12079
12079 一种机械臂,可通过带有传感器的手套无线模拟您的手部运动。
2022-09-19 16:01:337068 
,很简洁. 下载程序很简单,下好程序,用手柄测试,发现手柄没有附带电池.我得自己找两个7号电池,桌子上的空调遥控器的电池刚好能用. 手机app画面,很简易,就是一个按键对应一个动作组,操控蛮方便.开源机械臂单舵机操纵开源机械臂上位机操纵
2017-07-17 16:42:59
51单片机怎么处理机械臂数据
2023-10-31 06:29:13
Matlab提供的两种聚类分析提供源程序代码
2020-04-29 11:21:37
我想问问matlab中的simulink怎么仿真机械臂的PLC控制实现
2019-07-16 10:55:19
基于COM组件的Matlab与C++混合编程方式因拥有独立的运行环境和两种语言的互补优势而被众多科研人员和编程人员所接受,同时也是MathWorks公司推荐使用的混编方式。
2019-08-19 07:19:24
机械臂仿真控制
2020-09-29 19:23:16
机械臂的控制-------------控制器1.位置控制机器人最传统,最常用的控制方式就是位置控制,它能以0误差来达到指定位置或以0误差跟随指定轨迹。普通的位置控制,是控制机器人末端到指定的地点(让
2022-02-23 07:49:01
正运动学反过来,对于我们的机械臂而言,也就是已知末端执行器的位置和朝向,求每个关节的角度。我们的机械臂的三维运动是比较复杂的,这里为了简化模型更加便于大家的理解,我们对模型进行精简,先去掉下方云台的...
2022-01-20 06:46:45
机械臂仿真,用什么软件效果比较好?
2018-01-18 16:50:01
我现在在做机器人的路径规划,想用人工势场的算法,通过用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。有没有朋友做过,给点意见呗
2017-05-15 15:25:22
最近在做一个机械臂,需要规划机械臂的路径,并且对它进行定位和通过激光雷达进行避障处理,不知道STM32F407计算性能怎么样,能够满足要求吗?
2016-05-31 17:17:06
本帖最后由 tangwentao 于 2019-12-16 15:14 编辑背景: 公司本来搞软件的,现在跟别人合作,要搞个机械臂的东西。要求: 1.这个机械臂要搭载一个摄像头,然后由于机械臂的运动
2019-12-16 15:33:13
` 谁知道双绞线分为哪两种?`
2019-12-31 15:53:14
NI 9512模块开发实际装配系统。 SolidWorks装配图CARMA机械臂 Square One是关注满足更多用户技术需求的机器人和自动化公司。我们利用多种技术,通过提供高精度的高级运动学
2015-02-12 15:56:16
机械臂舵机PYB轴1X1轴2X2轴3X3注意:舵机的5V和GND最好外接足额的5V供电,板载的V+接口供电不足5V,可能会导致舵机无法转动!!只会嗡嗡响。三轴机械臂控制博主采用PYB作为主控,利用Servo库进行直接控制。垂直坐标系控制只用两个轴即可完成
2021-12-13 07:14:08
如何对机械臂的关节速度进行动态绘图?
2021-11-03 06:05:38
如何通过arduino单片机和机械臂零件设计一个手柄操控自学习机械臂模型?
2022-01-24 06:37:22
如何通过步进电机去控制机械臂?如何通过步进电机去实现一种插补算法?
2021-07-08 06:54:36
➤ 00机械臂的改动今天(2020-09-28 09:14:46)对新改进的机械臂进行整体调试。机械臂的改动包括有:在肩部关节对于 57HSXXXXEIS一体化步进伺服驱动电机 增加了α=1:10
2021-09-03 09:24:52
工业机械臂搬运工第一章绪论1.1 本课题研究的背景及意义1.2 机械臂在工业的应用现状1.3 本课题研究内容第二章机械臂工作流程2.1 步进电机工作的基本原理2.2 按键控制步进电机工艺流程2.3
2021-11-29 07:19:20
仿真执行;(8) 支持吸盘或抓头两种执行爪具选择;(9) 算法集成S型加减速,且速度参数可调;(10)支持机械臂录点回放再修改模式;(11)支持机器人爪头垂直、水平、旋转三维空间精确操作定位
2015-10-23 11:29:03
如何实现基于Arduino的PS2机械臂偏小车的设计?
2021-10-19 06:02:01
怎样去设计一种基于3D打印机的Delta机械臂?有哪些操作步骤?
2021-10-11 08:17:39
用STM32控制8个舵机(两个机械臂),在运行一两次以后就不稳定,为什么?急求!!!
2015-07-04 16:14:17
智能小车如何与机械臂相结合?
2021-12-27 06:15:24
机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15:09
仿真思路:有两种思路,第一种思路是电机输出电磁转矩,机械臂输入力矩,机械臂输出角度和角速度然后与电机的角度成一个减速比的关系。第二种思路是电机给角度指令,机械臂输入角度输出力矩,输出的力矩是电磁转矩
2021-08-30 06:31:51
计算出运行路径(三维),把极坐标的机械臂相对于直角坐标的机床的优势充分发掘出来,现在比较粗糟,见笑了!注:机械臂的模型是从互联网上下载的,我只是把它转换为WRL文件而已,我非常感谢原作者!感谢NI公司
2014-11-16 16:01:45
用STM32控制8个舵机(两个机械臂),在运行一两次以后就不稳定,为什么?急求!!!
2015-07-04 19:25:26
本设计能够成功的完成空间站的物品打扫,设计指标是按照空间站的物品打扫设计,进行DH建模,对机械臂求逆解,同时防误撞的核心思想是用RRT算法规划出一条路径,让机械臂的末端绕过遮挡物品从而到达需要到达的位置。...
2021-09-07 06:38:08
舵机怎么调机械臂
2016-07-30 09:01:45
五轴机械手主臂的负载惯量是如何去计算的?五轴机械手主臂的负载转矩是如何去计算的?
2021-06-28 09:17:36
请问如何通过ROS控制真实机械臂?
2021-10-13 08:25:50
`我打算买个六轴机械手模型用来验证自动运行算法,但不知道从机械角度上来来说哪种实验性能更好,可扩展性更好,这两种都是数字舵机带动的。麻烦给出为什么的理由,谢谢!左上角那种好像是工业机械手的模型,右下角那种是什么呢?两种应该都可以用来做机械手实验吧`
2015-07-15 17:00:59
根据之前的配置,我们已经可以通过move_group发送出机械臂各关节运动的轨迹,并且通过三次样条插补的方法,赋予各个关节在特定角度时的速度和加速度,通过启动程序节点可以看到,本次运动规划使用了
2021-06-28 09:45:50
分析了欠驱动两自由度机械臂主、被动关节间的动力学耦合特性,指出了被动关节处于不同位置时耦合特性的差异。针对主、被动关节间的动力学耦合特性及其差异,提出了两种
2009-08-04 15:51:33 27
27 移动机器人路径规划可分为两种类型:(1)全局路径规划;(2)局部路径规划。本文分析了Kohonen神经网络算法及其识别机理,提出了Kohonen神经网络和BP神经网络结合起来进行路径规划
2009-08-15 09:02:2913 Matlab 图像无法嵌入VC 程序界面是混合编程应用中的一个问题,文章通过两个实例分别介绍了两种实现方法:利用COM 组件技术的窗口嵌入方法和基于COM 的统一数据传输机制的方法,
2009-08-31 09:24:3020 两臂绘图机械手
一、任务设计一套机械手系统,该系统有两个固定长度的臂(AB、BC)和两个转轴(转轴1、转轴2)构成。在转轴1 和
2009-08-02 08:37:112192 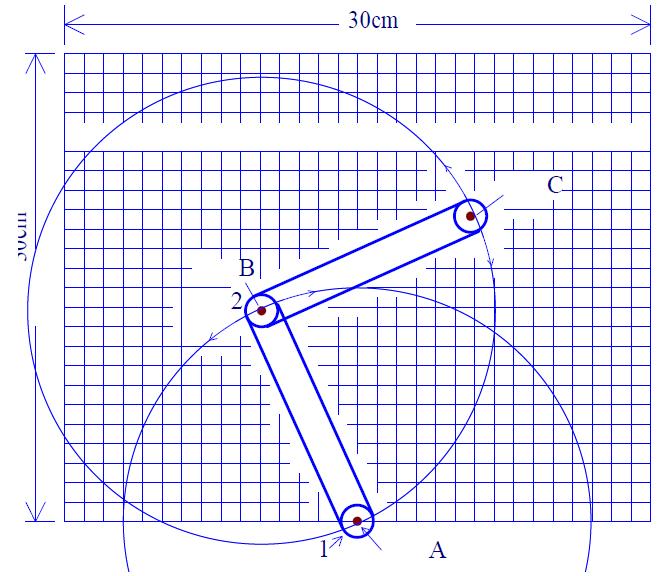
为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后针对机械臂的到达问题、沿曲线运动问题和避障问题, 分别
2012-02-17 16:55:04193 笔者简要介绍智能控制下的AGV, 阐述其重要的两个路径规划, 在静态已知环境中的路径规划和动态复杂环境中的路径规划。其中动态环境中的AGV路径规划是相对来说难解决的问题。笔者从多个角度对智能控制下的AGV静态路径与动态路径规划进行分析研究, 希望能够得到一套合理的规划路径。
2016-08-29 15:02:0314 介绍两种电机机械过载保护的结构_苟军善
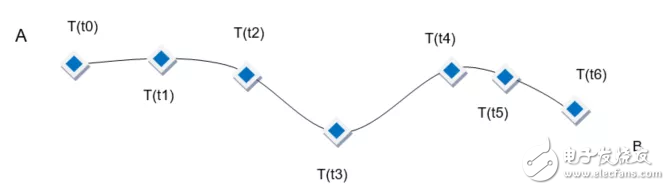
2017-01-01 15:44:291 机械臂的运动轨迹是指通过给定的路径的起点与终点,以及机构本身或者机构运行所存在的约束条件,求出每个关节的位移S,速度v,加速a的完整过程。 文中采用笛卡尔空间的网弧插值法使得机械臂运动平滑。笛卡尔
2017-11-03 10:26:0110 针对家庭服务机器人机械臂高安全性和低算法复杂度的两大需求,提出一种基于空间代价地图的机械臂运动规划新方法。利用空间代价地图来描述机械臂与约束条件发生冲突的可能性,以概率分析代替简单的布尔判断,提供了
2017-11-25 11:47:019 为解决拖挂式移动机器人系统路径规划算法精准性低、稳定性差和无法考虑系统间安全性等的问题,提出一种基于路径跟踪方法的路径规划算法。该算法融合快速拓展随机树( RRT)基本算法和路径跟踪控制方程,通过
2017-12-04 14:18:306 问题的数学模型。使用伪谱法求解该最优控制问题,并以细化网格的方式保证所得解符合路径约束,得到无碰撞可行泊车路径。利用该方法可同时求解平行泊车和垂直泊车两种场景的路径规划,仿真实验和实车实验验证了该方法的通用性和可
2018-02-24 10:36:2516 针对航天器在轨精细操作应用需求,对螺钉旋拧T具进行了研究,设计了一种适用于空间机械臂自主旋拧螺钉的末端工具。该工具由机械臂末端关节电机驱动旋转,利用电磁铁对螺钉吸附、夹持和释放,通过复位弹簧的压缩
2018-02-28 14:32:263 针对取件机械臂存在的绝对定位精度低、成本高等问题,采用基于定位精度可靠度的评价方法对机械臂进行了可靠性优化设计。使用多体系统理论建立了机械臂的静态误差模型,基于蒙特卡罗法对其定位精度进行了分析,并得
2018-03-02 15:11:143 连续型机械臂是一种新型仿生机械臂,通过模拟象鼻或章鱼触手的运动方式来实现多自由度作业。从1999年提出连续型机械臂的概念以来,国内外研究团队已经提出了很多种设计方案与较为成熟的运动学模型。目前国内
2018-03-05 13:48:580 针对机械臂的实时控制问题,基于约束预测控制,提出了一种机械臂实时运动控制方法。介绍了机械臂动力学模型并进行了线性化处理,以降低算法复杂度、保证实时性。设计了轨迹跟踪控制器和约束预测控制器,其中轨迹
2018-03-26 09:33:041 搭载3D视觉的机械臂,可以对图像进行处理、分析和理解,能够为系统进行定位以及轨迹规划提供准确的依据。
2018-07-27 10:59:525776 本文档的主要内容详细介绍的是用MATLAB程序实现基于势场法的路径规划资料免费下载。
2019-06-13 08:00:004 力矩前馈控制。刚才两个例子都是将计算好的力矩做前馈。由于机械臂的移动速率远远小于电机控制速率,所以计算力矩的频率并不高。比如说,电机的控制频率为5K Hz,前馈力矩计算的频率大约是50Hz。对控制器的硬件要求不高。
2019-09-11 14:58:399763 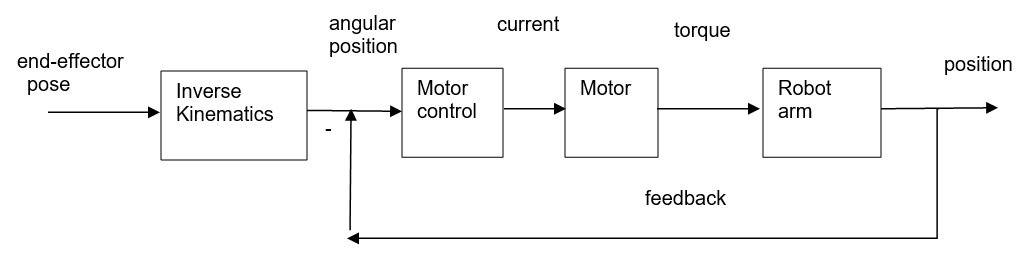
我计划最终为该机械臂创建3D模型,并在爪子和马达上进行扩展,以便实际上可以成为功能齐全的机械臂。
2019-10-09 09:31:4716585 ,仿真功能强大,可以在模型中通过改变结构,优化系统参数,在仿真环境中分析结果。利用 SimMechanics 的上述优点,以工业六自由度机械臂 ER10 为研究对象,将 SolidWorks 建立好的机械臂 ER10 模型导入到 MATLAB/ SimMechanics 仿真平台中,生成对应的仿真模型,
2019-11-12 08:00:001 主要阐述机械臂手册的使用说明。
2021-03-22 16:09:3017 整理和分类,按照结果最优性的不同,多智能体路径规划算法被分为最优算法和近似算法2类。最优的多智能体路径规划算法主要分为基于A*搜索、基于代价增长树、基于冲突搜索和基于规约的4种算法。近似的多智能体路径规划算法主要
2021-06-04 11:56:434 为什么要进行机械手臂路径规划? 随着科技的发展,机械臂由最初的简单平面搬运逐渐发展到现在的立体三维空间搬运,其任务的难度大大提升。因此,在搬运过程中如何精确快速地抓取目标物体,成为机械臂发展亟需
2021-07-12 17:23:323278 本文比较了机械臂和移动机器人两种工业机器人的控制系统方案,对其特点进行了介绍。 以上分类是根据应用对象,此外,市面上更多的是通用型运动控制器,即控制非标设备的。 1 控制器底层方案1.1 机械臂类
2021-07-22 17:37:344166 工业机械臂搬运工第一章 绪 论1.1 本课题研究的背景及意义1.2 机械臂在工业的应用现状1.3 本课题研究内容第二章 机械臂工作流程2.1 步进电机工作的基本原理2.2 按键控制步进电机
2021-11-19 12:21:0872 小机械臂进行解锁后,小机械臂在轨测试逐步展开。科研人员首先对机械臂的各项产品进行检查,其检查内容主要包括了控制器状态确认、关节检查、末端检查等。
2022-08-29 15:39:461217 导读:本期文章主要介绍在MATLAB/simulink中建模时的两种不同实现方式,一种是直接用现成的文件库中的模块进行搭建,一种是用Sfunction代码实现。接下来以电压型磁链观测器为建模目标,来比较这两种实现建模方式的各自优势。
2022-09-15 10:07:412803 导读:本期文章主要介绍在MATLAB/simulink中建模时的两种不同实现方式,一种是直接用现成的文件库中的模块进行搭建,一种是用Sfunction代码实现。接下来以电压型磁链观测器为建模目标,来比较这两种实现建模方式的各自优势。
2022-09-15 10:10:526304 一直在纠结是先讲头部运动,还是先讲空间坐标系,后来决定还是先讲头部运动,让大家先感受一下机械臂在空间中是怎么定位的,然后我们下一节将详细介绍机械臂的空间坐标是怎么回事。空间坐标是一项非常复杂且需要
2022-10-10 17:30:411478 
针对不同高温场景的不同特点,格物优信特研制了两种热成像机械退膛装置——炉外热成像机械退膛,以及炉内热成像机械退膛。
2022-10-19 10:50:001371 电子发烧友网站提供《机械臂制作案例.zip》资料免费下载
2022-10-28 09:26:596 两种MOS冗余驱动方案
2022-10-28 12:00:032 电子发烧友网站提供《DIY机械臂.zip》资料免费下载
2022-11-08 10:32:222 电子发烧友网站提供《迷你机械臂构建.zip》资料免费下载
2022-11-11 11:16:040 未来的趋势绝对是机器人代替人工作业,机械臂首当其冲。如今机械臂工业化已经比较成熟,许多人都开始对机械臂感兴趣,想要学习的话手里肯定得有一台机械臂帮助学习,那么选择一款机械臂是相当重要的一个步骤。因为
2022-12-09 17:41:502887 
电子发烧友网站提供《最简单的机械臂.zip》资料免费下载
2022-12-13 11:03:311 电子发烧友网站提供《人臂控制机械臂开源.zip》资料免费下载
2023-01-31 14:43:054 电子发烧友网站提供《如何制作机械臂.zip》资料免费下载
2023-02-08 09:46:060 基于机器人学理论知识,利用标准D-H参数法建立关节型机器人的数学模型,使用Matlab的Robotics Toolbox工具包搭建模型。
2023-02-08 09:12:527201 使用一个桌面型的六轴机械臂,在机械臂的末端安装一个摄像头,来进行 人脸识别和跟踪 的一个功能。该功能分为两个模块,一个是 人脸识别模块 ,另一个是 机械臂的运动控制模块 。 在前文有介绍到
2023-02-10 16:07:282621 
a. 本栏路径规划利用矩阵(二维数组)来表示栅格地图(因为对于矩阵,无论MATLAB、C++还是Python,矩阵更适合数组的表达,更便于编程。)
2023-03-15 11:40:353494 Matlab自问世以来,就有数以百万级的工程师和科学家使用,是各大高校不可或缺的研究软件,基于矩阵的Matlab语言是世界上表示计算数学最自然的方式,可以说Matlab是工程师需要了解或掌握的数学软件,今天我们来看看,若是遇见Matlab搜索路径问题该如何解决。
2023-05-18 11:25:533764 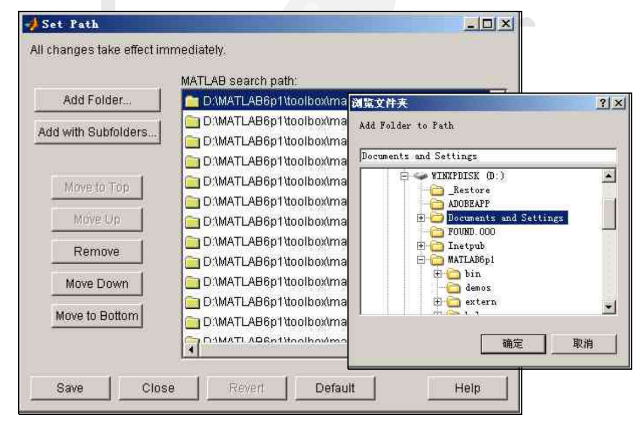
接下来的几篇文章将主要围绕着全局路径规划的常见算法展开。全局路径规划与局部路径规划不同,全局路径规划是主导全局,探求的是
整个地图中,出发点到目标点之间最优的路径,主要采用一些计算机学科中的最短路径
2023-06-07 14:23:410 电子发烧友网站提供《PC控制的机械臂设计.zip》资料免费下载
2023-06-12 10:41:592 我们要在生产流水线上生产两种产品A和B,每种产品需要花费不同的时间,并需要不同数量的人手。每个流水线使用时间为8小时,而可用的总工人数为100。我们希望最大化利润。 我们可以使用MATLAB的线性规划工具箱来建模和解决这个问题。首先,我们定义优化
2023-06-14 10:25:001529 电子发烧友网站提供《机械臂:Arduino + Matlab.zip》资料免费下载
2023-06-28 15:28:322 按照一定的评价标准规划出一条从起始状态 到目标状态的可行路径。根据对环境信息的把握程度可分为两类:基于环境信息 已知的全局路径规划,又称为静态规划或离散规划;基于传感器信息的局部路径 规划,又称为动态规划或在线规
2023-07-19 11:22:213 路径规划算法主要可分成两种,一种是基于搜索结果的规划,另一类便是本文中将要提及的基于采样的规划。 一般而言,基于搜索的规划(如Astar)通常是运行在栅格地图上的。当栅格的分辨率越大时,算法搜索
2023-11-16 15:45:031140 
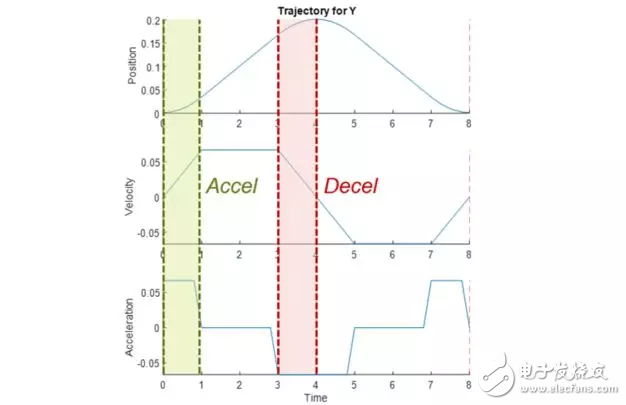
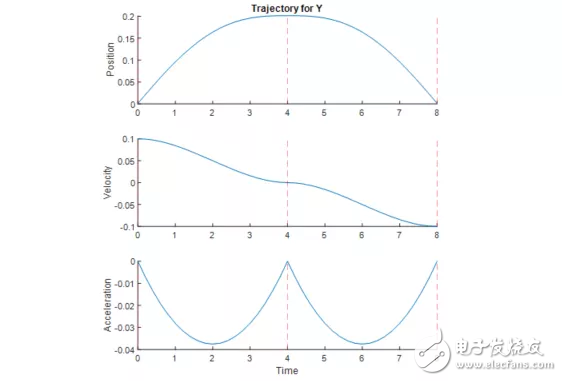
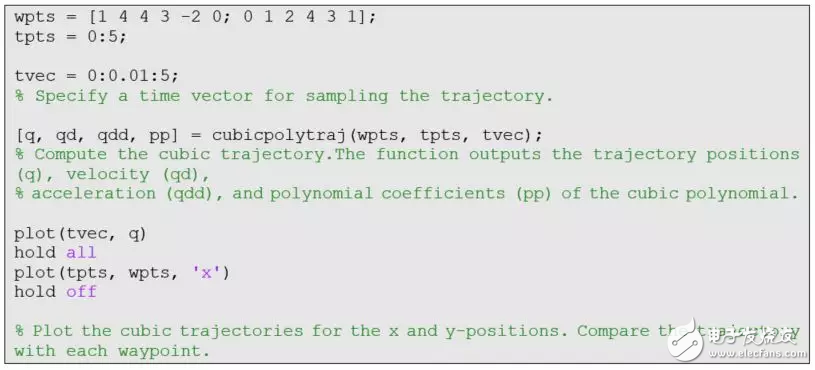
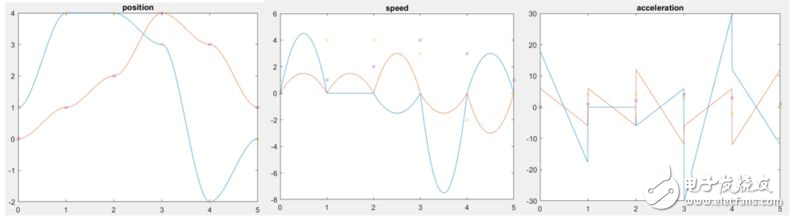
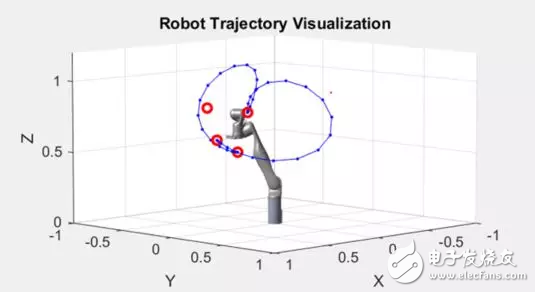
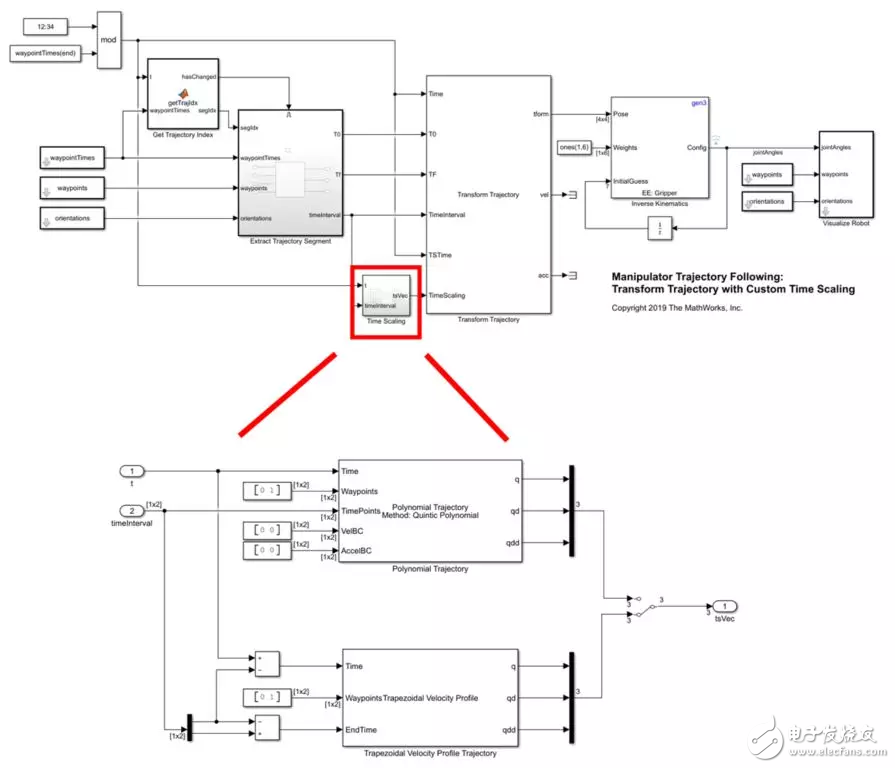
采用五次多项式插值法进行机械臂轨迹规划,基于Matlab Robotics Toolbox平台进行关节空间轨迹规划,得到各关节角度、速度和加速度与时间关系曲线。 此外,每次重新启动MATLAB时都
2023-11-17 16:11:192660 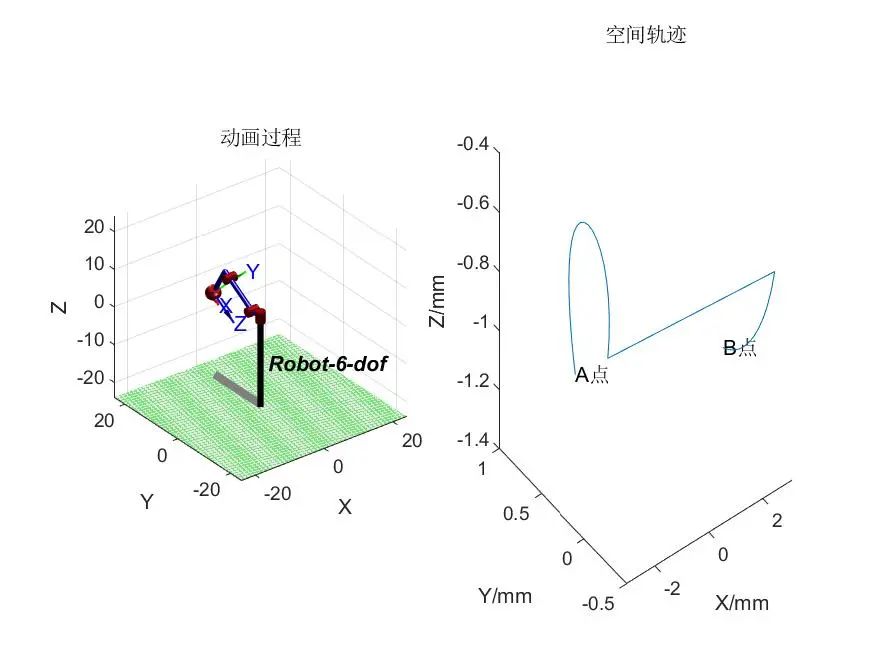
刚性机械臂 机械臂建模是机械臂控制的基础,控制效果的好坏很大程度上决定于所建立的动力学模型的准确性。 目前对刚性机械臂的动力学建模方法较多,理论较为成熟。而对于柔性空间机械臂的精确建模尚处在研究阶段
2023-11-17 17:03:341706 柔性机械臂 刚性机械臂建模方法已经可以有效地求解出机械臂各部分之间的耦合情况,但是对于柔性机械臂的动力学建模其侧重点在于基于刚性机械臂建模方法的基础上如何有效的处理机械臂关节柔性以及臂杆柔性
2023-11-17 17:12:051680 通往目的地的安全和无碰撞的路径。 路径规划问题可以分为两个方面: (一)全局路径规划:全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。 通常全局路径
2023-11-24 15:57:312015 控制性能。 精度衡量:直接测量机械臂末端的位置比较困难,这里采用一种近似的方式,比较机械臂各轴指令角度与实际编码器反馈角度间的偏差值。 2.控制策略 三环反馈伺服控制 这种位置控制方式是大家最为熟悉的。 此时控制都是
2024-03-05 08:43:252333 
机械臂对精度和运动稳定性的要求较高,因此计算量大、周期短,比移动机器人一般要高1到2个量级。移动机器人一般对同步精度要求不高,其配置相对较低。
2024-03-11 09:53:051917 
和智能化的任务,提升了人机协作的效率和效果。我们个人平时接触不太到机械臂这类的机器人产品,但是有一种小型的机械臂我们人人都可以拥有它myCobot,价格低廉的一种桌面型机械臂。 案例介绍 本文介绍同济子豪兄开源的一个名为“vl
2024-07-03 14:09:052285 
背景:两种常见的散热设计思路 在大电流或高功率器件应用中,散热和载流能力是PCB设计中必须解决的难题。常见的两种思路分别是: 厚铜板方案:通过整体增加铜箔厚度(如3oz、6oz甚至更高),增强导热
2025-09-15 14:50:39584
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论