 自动驾驶核心技术之路径规划
自动驾驶核心技术之路径规划

无人车的技术路线实际早已确定,那就是轮式机器人的技术路线。这已经从2007年的DARPA大赛到谷歌福特百度的无人车,超过十年的验证,轮式机器人技术完全适用于无人车。目前所有无人车基础算法的研究都源自机器人技术。
首先来说明三个概念,路径规划、避障规划、轨迹规划。路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。
避障规划又叫局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。主要是探测障碍物,并对障碍物的移动轨迹跟踪(Moving Object Detection and Tracking ,一般缩写为MODAT)做出下一步可能位置的推算,最终绘制出一幅包含现存碰撞风险和潜在碰撞风险的障碍物地图,这个潜在的风险提示是100毫秒级,未来需要进一步提高,这对传感器、算法的效率和处理器的运算能力都是极大的挑战,避障规划不仅考虑空间还考虑时间序列,在复杂的市区运算量惊人,可能超过30TFLOPS,这是无人车难度较高的环节。未来还要加入V2X地图,避障规划会更复杂,加入V2X地图,基本可确保无人车不会发生任何形式的主动碰撞。
轨迹规划则源自机器人研究,通常是说机械臂的路径规划。在无人车领域,轨迹规划的定义感觉不统一。有人将避障规划与轨迹规划混淆了。轨迹规划应该是在路径规划和避障规划的基础上,考虑时间序列和车辆动力学对车辆运行轨迹的规划,主要是车纵向加速度和车横向角速度的设定。将设定交给执行系统,转向、油门、刹车。如果有主动悬挂,那么轨迹规划可能还要考虑地形因素。
三大规划是无人车最复杂的部分,算法多不胜数,让人眼花缭乱,这也是百度、谷歌和苹果科技巨头要切入无人车领域的主要原因,这些科技巨头最擅长的就是算法的优化整合。当然传统车厂如福特和丰田,拥有对车辆动力学的优势,在此领域实力并不比科技巨头要差,尤其是丰田,从开源SLAM到KITTI,软件实力丝毫不次于谷歌。
全局型路径规划不算复杂,前提是有拓扑级地图,这对地图厂家来说很容易的。对于非地图厂家是有点麻烦的,不过只能算小麻烦。所以我们重点讲避障规划,避障规划的前提是对周围环境有深刻的理解,有一个非常完善实时的的环境理解。
有了环境模型(不同于环境理解),在加上路径搜索就构成了路径规划。通常环境模型是三大类,分别是栅格法、可视图法、自由空间法。路径搜索的算法就多了,Dijkstra、Floyd-Warshall、A+算法、层次法、动作行为法、势场域法、栅格法、模糊逻辑法、拓扑法、惩罚函数法、遗传算法、模拟退火法、蚁群法和神经网络法等。需要指出的是,大多数算法都是诞生于六十年代。
这还仅仅是2D层面的,3D层面的将更加复杂。每一种算法下面还有再细分的算法,让人看了头晕目眩。因为很少有文献说3D路径算法,我们就多说几句,3D路径算法大体可以分为五类,取样算法(Sampling)、节点算法(Node)、工程数学模型算法(Mathematics)、仿生学算法(Bioinspired)、混合算法(MultiFusion)。以取样型算法为例,下面可以再分主动型与被动型。主动型下面还可以再细分。
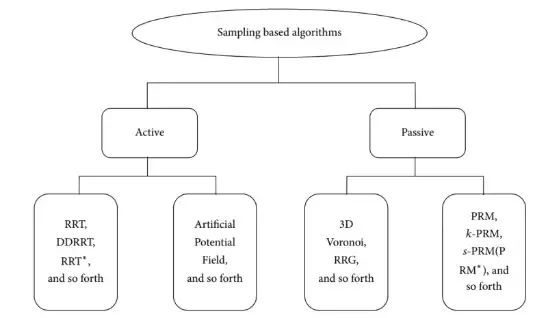
取样型3D路径规划
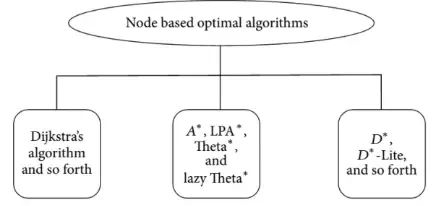
节点型算法下面再分三大类
环境建模方面,栅格法是公认最成熟的算法,栅格法应该也是安全系数较高的算法,也是最耗运算资源的算法。不过无人车要考虑安全,安全是第一位的,成本是第二位的,同时有英伟达和英特尔这样的半导体巨人在不断提高运算性能,运算资源不用过多考虑。
栅格法把工作空间分割成规则而均匀的含二值信息的栅格。在机器人移动的过程中,栅格的尺寸和位置不变。二值信息分别表示该栅格处是否有障碍,没有障碍的栅格称为自由栅格,否则为障碍栅格。栅格的尺寸通常和机器人的基本移动步长相适应,故机器人移动转化成从一个自由栅格移动到下一个自由栅格,机器人移动的路长对应于机器人爬过的栅格数。栅格法直观且建模相对较容易,因此得到了广泛的应用。
另外两种算法,可视图法和自由空间法和栅格法相比的优点是比较灵活,对运算资源消耗少。缺点很明显,障碍物多少与算法复杂程度成正比,算法太复杂时可靠性就降低,同时不太适合动态环境,要求运动速度变化尽量小。栅格法的缺点是如果分辨率高,对运算资源和内存需求较高。显然,可视图法和自由空间发适合机器人,栅格法更适合无人车,这在业内差不多已经是定论。这和传感器也有部分关系,视觉系统难以适应太精细的格栅法,因为视觉系统的要做精细的定量边界分割是不可能的,而激光雷达非常适合栅格法。
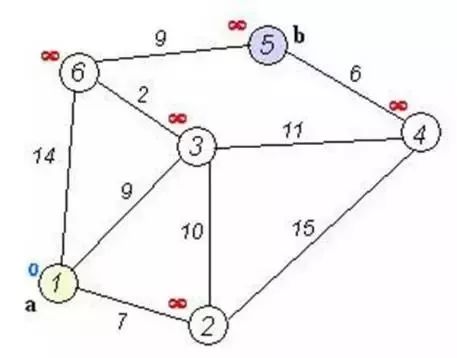
路径搜索方面,典型的如Dijkstra
Dijkstra(迪杰斯特拉)算法是最短路算法的经典算法之一,由E.W.Dijkstra在1959年提出的。该算法适于计算道路权值均为非负的最短路径问题,可以给出图中某一节点到其他所有节点的最短路径,以思路清晰,搜索准确见长。相对的,由于输入为大型稀疏矩阵,又具有耗时长,占用空间大的缺点。
轨迹规划则研究的很少,因为大部分科技公司都没能力在车辆动力学领域一展拳脚。科技公司都将精力花在如何生成轨迹上,而对于生成的轨迹是否满足运动学约束、 侧滑约束以及执行机构约束,即轨迹的可行性,研究相对较少。对于无人车这一受非完整性约束的系统,研究人员通常基于车体模型进行轨迹规划。按照车体模型的较精确程度,轨迹规划方法可以进一步分为基于模型预测控制 (Model predictive control, MPC) 以及基于几何轨线的规划方法。基于模型预测的无人车轨迹规划方法首先由 Kelly A和Nagy B(有点奇怪的名字) 提出。
对于移动机器人来说,轨迹生成问题主要研究如何生成一系列动作,使得机器人由初始状态到达目标状态。对于无人车来说,其初始状态包括其二维坐标 (x, y)、 航向角 ψ 以及曲率 κ
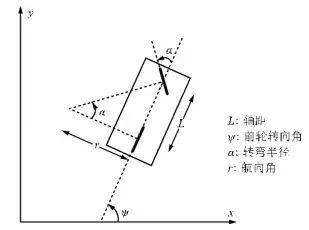
曲率、 转弯半径、 前后轮轴距以及前轮转向角之间的关系为
对于采用转向和速度作为控制量的地面移动机器人来说, 其运动学模型为
实际情况远比这复杂,还需要建立大量的数学方程。良好的规划必须建立对周边环境,尤其是动态环境的深刻理解。
-
机器人
+关注
关注
213文章
30574浏览量
219430 -
自动驾驶
+关注
关注
791文章
14667浏览量
176370
原文标题:自动驾驶核心技术之—— 路径规划
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
不同等级的自动驾驶技术要求上有何不同?
无引导线的左转场景下,自动驾驶如何规划轨迹?

端到端自动驾驶相较传统自动驾驶到底有何提升?

塑造自动驾驶汽车格局的核心技术
数据驱动自动驾驶:核心要素与发展全景解析

自动驾驶汽车在隧道、山区如何精准定位?


卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

AGV小车中的动态路径规划算法揭秘

韩国自动驾驶技术交流团到访光庭信息
新能源车软件单元测试深度解析:自动驾驶系统视角
自动驾驶经历了哪些技术拐点?

自动驾驶大模型中常提的Token是个啥?对自动驾驶有何影响?
2024年自动驾驶行业热点技术盘点
从《自动驾驶地图数据规范》聊高精地图在自动驾驶中的重要性






 工商网监
工商网监
评论