 位置控制和力控制的差异在哪里
位置控制和力控制的差异在哪里

六维力传感器是机器人力控解决方案中应用最广泛的传感器之一,其性能更好,成本也相对较高。通过使用六维力传感器,URe系列机器人可以更好地感知其操作环境,从而进行更精确的操作,提高生产效率和质量。
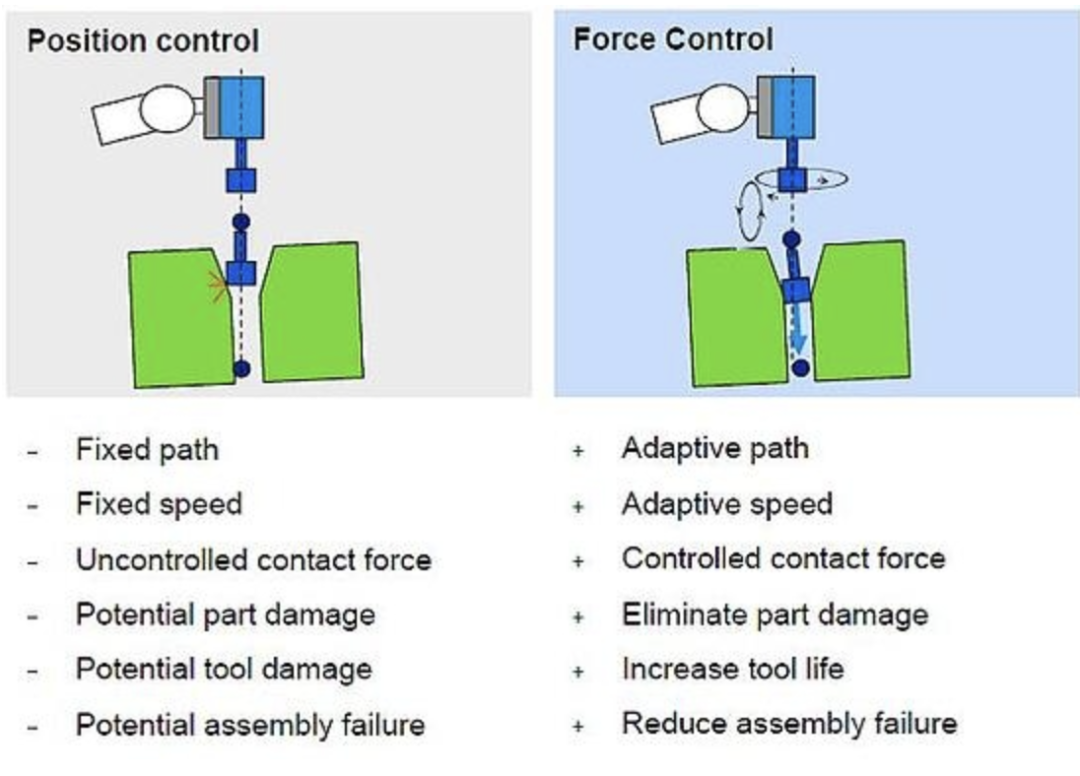
机器人位置控制和力控制的主要区别在于它们各自的主要控制目标和应用场景。
位置控制主要关注的是机器人末端执行器的位置和姿态。在位置控制模式下,机器人会严格按照预先设定的位置轨迹进行运动。
这种控制方式主要用于那些对精度和稳定性要求较高的任务,例如焊接、装配等。在位置控制中,如果机器人遇到阻碍,如遇到墙壁或其他物体,机器人的力量控制会启动,以避免对机器人和环境造成损害。
力控制的主要目标是控制机器人与环境之间的作用力。在力控制模式下,当机器人遇到阻碍时,它会智能地调整预设位置轨迹,从而消除内力。
这种方法更注重的是机器人与环境之间的交互,而不仅仅是机器人的运动轨迹。
位置控制和力控制在以下方面存在差异:
- 控制目标:位置控制的目标是使机器人的末端执行器达到预设的位置和姿态,而力控制的目标是使机器人与环境之间的作用力在可接受的范围内。
- 应用场景:位置控制适用于对精度和稳定性要求较高的任务,如焊接、装配等。力控制则更适用于人机协作、康复训练和柔顺生产等领域。
3.安全性:在位置控制中,如果机器人遇到阻碍,机器人的力量控制会启动,以避免对机器人和环境造成损害。而在力控制中,机器人会智能地调整预设位置轨迹,从而消除内力,安全性更高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31439浏览量
223632 -
力控
+关注
关注
0文章
22浏览量
8114 -
位置控制
+关注
关注
0文章
24浏览量
9678
发布评论请先 登录
相关推荐
热点推荐
NANDFLASH烧写的位置在哪里?
在将程序烧写到NANDFLASH时,请问烧写的位置在哪里,是从首块首地址开始吗?如果我想往NANDFLASH的某些位置进行擦写动作,要避开有用的程序代码部分。如何查看
发表于 03-26 06:45
一千元与一万元电视差异到底在哪里
在8月17日拼多多推出了JVC品牌智能电视,用1999元创造了65英寸液晶电视价格新低,与最贵的同尺寸液晶电视差价近10倍。在巨大差价面前不禁让人疑惑,都是液晶电视,一千元与一万元电视差异到底在哪里?
微控制器的主要应用在哪里
微控制器又称为单片机,是一种集成在芯片上的微型计算机,用于控制嵌入式系统中的特定操作,那么微控制器的主要应用在哪里?接下来将为您揭晓。
什么是机器人的力控制?有力控制后还需要位置控制吗
力控制一般泛指机器人应用领域中,利用力传感器作为反馈装置,将力反馈信号与位置控制(或速度控制)输入信号相结合,通过相关的
雷达信号有什么特点?和通信信号的差异在哪里呢?
先学好数字信号处理的知识,才能慢慢的理解雷达信号处理!先来看看雷达信号有什么特点?和通信信号的差异在哪里呢?载波的信息都是有用的,但各自用的肯定不一样!
网线有无屏蔽层的差异在哪里
从结构角度来看,屏蔽层是最直观区别屏蔽网线和非屏蔽网线的一个外观,那除了屏蔽层这一个不同之处,还有什么不同你清楚吗?下面就跟着科兰小编一起来了解一下网线有无屏蔽层的差异在哪里。
PLC和运动控制器的比较,在哪些要求下选用运动控制器?
现在PLC的运动控制功能越来越强了,圆弧插补、螺旋插补、电子凸轮都能轻松胜任了,那运动控制器和具备运动控制功能的PLC的差别在哪里,运动控制


闭环控制系统的位置反馈元件应装在哪里
闭环控制系统,也称为反馈控制系统,是一种控制系统,其中系统的输出被测量并与期望的参考值进行比较,然后产生的误差信号用于调整系统的行为,以减少误差并使输出尽可能接近期望值。在闭环控制系统



评论