 力触觉感知系统的工作原理
力触觉感知系统的工作原理

力触觉感知系统在机器人操作中具有非常重要的作用。它可以检测机器人末端执行器与工件相互作用时产生的三维力/力矩和接触信息。
这些信息对于机器人来说是极其重要的,它们可以提供关于环境、操作和自身状态的详细信息,帮助机器人做出更精确和安全的操作。
具体来说,力触觉感知系统的工作原理如下:首先,安装在机器人末端执行器上的力/力矩传感器会实时检测到与工件的相互作用力。
这些力信号将被转换为电信号,然后通过数据传输到机器人的控制系统。
在控制系统内,这些电信号会被进一步处理和分析,以生成有关机器人操作的各种信息。这些信息可以包括工件的形状、大小、硬度等,以及机器人末端执行器的姿态、位置等。
这些信息对于机器人来说是极其重要的,它们可以帮助机器人更好地适应环境,做出更精确的操作。
关节扭矩传感器的基本原理是应变测量。当机器人关节运动时,扭矩传感器会感受到由机器人关节施加在传感器上的力矩,这会导致传感器发生微小的形变。
扭矩传感器通过测量这种形变来确定扭矩的大小。
在机器人关节中,扭矩的传递通过齿轮、轴承和其他传动部件实现。
传感器通常被安装在这些传动部件中的一个上,以便测量扭矩。其中一种常见的传感器类型是应变片传感器。
机器人关节力控制系统主要通过对机器人的每个关节进行控制,实现机器人的运动控制、定位以及精确度的保持。一般来说,机器人关节力控制系统主要由伺服驱动器、编码器、控制器等组成。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55875浏览量
795700 -
机器人
+关注
关注
214文章
31682浏览量
224618 -
感知系统
+关注
关注
1文章
88浏览量
16482
发布评论请先 登录
相关推荐
热点推荐
介绍几种触觉传感器的工作原理 PZT触觉传感器的研究进展和制作工艺
人体皮肤通过与物体表面的接触,对物体的粗糙度、硬度、导热性、温度、湿度、锐利性、振动、触觉力、触觉压力等物理性能的进行综合反应。
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
,以及绕着这三个方向转动的力矩——总共六个维度。这样一来,机器人就能获得最完整的力的信息。
它的工作原理并不复杂:传感器内部有弹性元件和应变片。外力一作用,弹性体就发生微小变形,应变片的电阻值跟着变化
发表于 04-29 16:29
三维力传感器工作原理及应用领域是什么样的,在未来市场是占据怎么的地位?
与传感器校准中心重合,但力的方向与大小随机变化的场景。例如,机器人灵巧手在抓取鸡蛋时,指尖需要同时感知抓取力(法向)和滑动趋势(切向),这是单轴传感器无法完成的任务。
第二部分:工作原理
发表于 05-21 09:37
元宇宙怎么感知触觉
元宇宙怎么感知触觉?今年元宇宙爆火,元宇宙几乎成了人们讨论的家常,建立元宇宙,从感知现实开始。元宇宙离不开3D触觉技术的支持,Facebook近日推出了一款适用于机器人和可穿戴设备的“
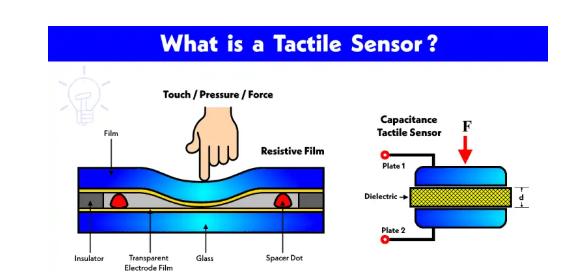
什么是触觉传感器?触觉传感器如何工作?
触觉传感器是我们在日常活动中最常用的。许多日常活动,如手机触摸屏、生物识别安全系统、压力测量、力测量、机器人等等都使用这种传感器。
发表于 08-29 14:44
•6824次阅读
基于视觉的多模态触觉感知系统
传统的多模态/多任务触觉感知系统通过集成多种传感单元来达到多模态触觉信息的解耦,但其往往导致系统结构的复杂性,以及需要应对来自不同刺激间的干
发表于 10-18 11:24
•2249次阅读

智能驾驶系统的工作原理
智能驾驶系统的工作原理主要基于传感器技术、通信技术、人工智能算法以及计算机程序的综合运用。以下是智能驾驶系统工作原理的介绍: 一、感知
仿生触觉传感器:触碰未来的科技奇迹
传感器的种类、工作原理及其在现实生活中的应用。 一、仿生触觉传感器的种类 仿生触觉传感器种类繁多,根据工作原理和材质的不同,主要可以分为以下几类: 压阻式传感器:这类传感器的
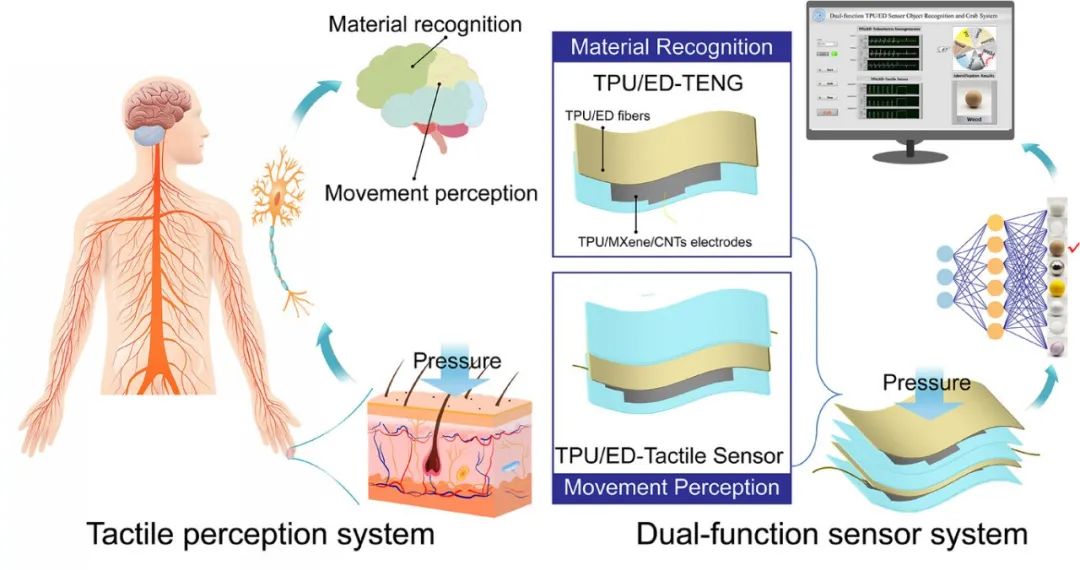
研究基于多功能离子纤维传感器系统的物体识别和抓取的人工触觉感知
人类触觉感知是一种复杂的感觉系统,它依赖于皮肤中的感觉受体来接收外部刺激,转换信号,随后通过神经系统分析和识别这些信号。传递到大脑皮层的触觉
炭纸及双极板电阻仪力值加载系统的工作原理与关键技术
工作原理 在炭纸及双极板电阻仪中,力值加载系统承担着向炭纸或双极板样品施加特定压力的重要任务。其核心工作原理基于力的传递与控制机制。常见的
灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”
触觉传感器。 本报告将系统梳理灵巧手的功能需求、主流厂商技术进展、硬件架构拆解,并重点聚焦感知系统的演进路径与传感器选型,结合2026年春晚等标志性事件,揭示中国乃至全球灵巧手传感




评论