 机器人阻抗控制实现规律
机器人阻抗控制实现规律

从力与运动的角度,阻抗控制实现规律可以总结如下:
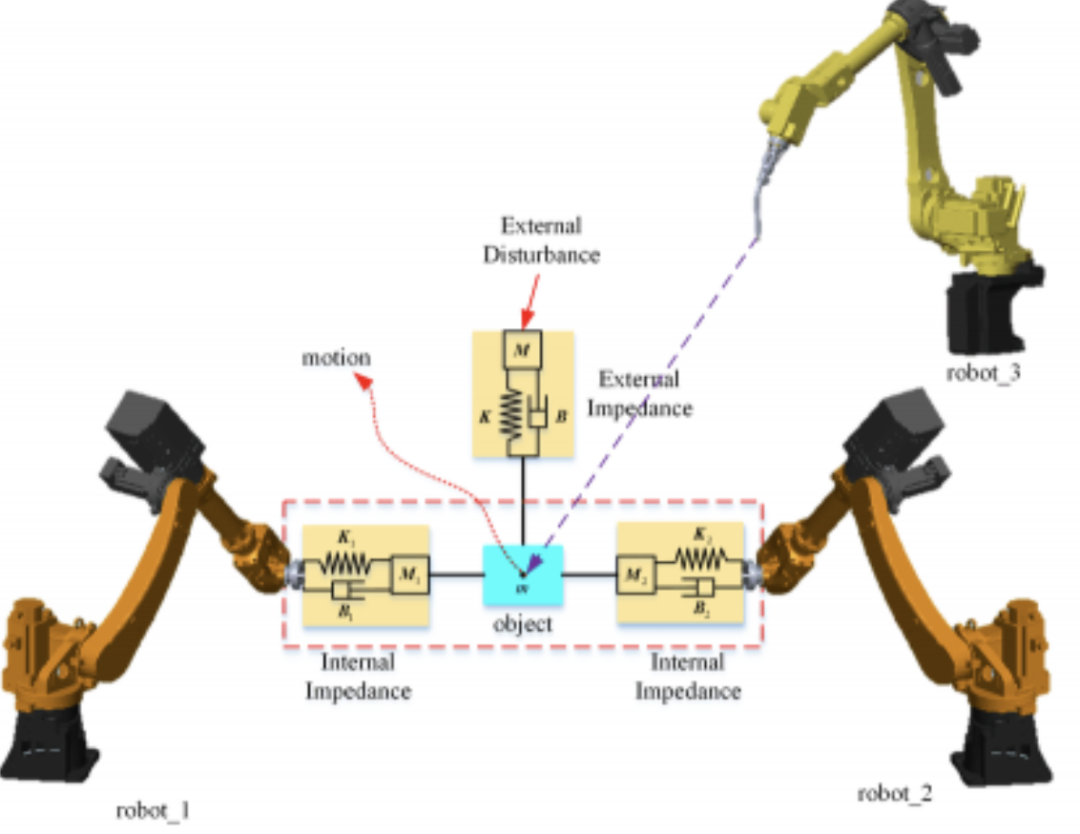
1. 力与位移关系:阻抗控制通过建立力与位移之间的关系来实现控制。
这种关系可以使用弹簧-阻尼系统来描述,其中弹簧表示机器人的刚度,阻尼表示机器人的阻尼特性。根据该关系,当外部施加力对机器人产生作用时,机器人的位移会相应改变。
2. 阻抗参数调节:阻抗控制通过调节阻抗参数来控制机器人对外部力的响应。
阻抗参数包括刚度、阻尼和质量等,通过调节这些参数的值,可以实现对外部力的不同响应特性。例如,增加刚度可以使机器人对外部力更加刚性地响应,而增加阻尼可以使机器人对外部力的消散更快。
3. 力控制模式:阻抗控制可以实现力控制模式。在力控制模式下,机器人会根据外部施加的力来调整自身的位移,以实现对外部力的精确控制。这种控制模式广泛应用于力导引、物体抓握和与人类操作者的协作等任务中。
4. 运动控制模式:除了力控制模式,阻抗控制还可以实现运动控制模式。在运动控制模式下,机器人会根据期望的位移来调整自身的力响应,以实现对运动的控制。
这种控制模式在需要控制机器人的运动轨迹或位置时非常有用。
5. 力与位移反馈:阻抗控制通常使用力与位移的反馈信息来实现控制。
通过实时测量外部施加的力和机器人的位移,控制系统可以根据设定的阻抗参数和控制策略来计算出合适的控制指令,以调整机器人的力响应和位移。
总体而言,阻抗控制通过建立力与位移之间的关系,调节阻抗参数以及使用力与位移反馈来实现对外部力和运动的控制。这种控制方法在机器人操作中具有广泛的应用,能够实现精准的力控制和与环境的交互,为实现柔性、精准和协作性的机器人操作提供了重要的手段。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31682浏览量
224618 -
测量
+关注
关注
10文章
5786浏览量
117115 -
控制模式
+关注
关注
0文章
33浏览量
8617
发布评论请先 登录
相关推荐
热点推荐
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书
基础、机器人本体、电子控制设备、传感器与导航和机器人电源系统等。《机器人设计与实现》是按照搭积木的方法指导
发表于 08-01 18:21
什么是工业机器人
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和
发表于 01-19 10:58
机器人从事件提取规律或道理行得通吗?
了。机器人:摔跤了吗?我:没摔。机器人:与前面矛盾了。你应该摔跤。我:……人工智能可以不断地从具体事例中归纳出道理或对规律的认识,道理积累多了,就可以形成一套系统的规则。大家看这样的思路有可行性吗?
发表于 03-09 14:29
辰汉-如何实现服务机器人的运算与控制
的能力。红外模块可以实现对一些外部电器的操控,电池和电池管理模块给整个机器人的运转提供能量。辰汉-硬件结构是实现服务机器人运算和控制的基础,
发表于 06-09 17:18
如何实现移动机器人的设计?
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移
发表于 11-23 15:08
【四足机器人】SOLO技术详解--(1)介绍(2)平台和机器人概述【翻译】精选资料分享
摘要我们提出了一个新的开源机器人的腿部力矩控制系统,这个系统的特点是低成本及结构简单。这个系统由高力矩无刷直流舵机和适合阻抗调节和力矩控制的低传动结构组成。同时我们也设计了一个适应冲撞
发表于 09-13 06:33



评论