 FMCW和ToF激光雷达,哪种更适合自动驾驶?
FMCW和ToF激光雷达,哪种更适合自动驾驶?

[首发于智驾最前沿微信公众号]在自动驾驶系统里,激光雷达被视为最重要的感知硬件,其通过激光探测前方路况的具体情况,并生成三维信息。正因为它看得“准”,围绕激光雷达的技术路线一直是自动驾驶领域长期争论的话题。其中ToF和FMCW这两种测距方式常被拿来讨论。它们都能让激光雷达“看见”距离,但底层原理、性能边界以及对自动驾驶系统的意义却并不相同。
什么是ToF和FMCW?
自动驾驶系统中的激光雷达(LiDAR),本质上是用光来感知周围的世界。它不断向周围发射激光束,当激光遇到物体反射回来,系统接收这些回光,就能计算出物体的位置和距离。目前激光雷达最常见的两种测距方式就是ToF(飞行时间法)和FMCW(调频连续波)。
ToF是一种基于时间测量的方法。它发射一束短暂的激光脉冲,然后精确计算这束光从发出到返回的时间,就可以探测障碍物的距离和位置。由于光速是已知的,根据时间差就能直接算出距离。这就像在山谷里大喊一声,通过听到回声的时间来判断山壁有多远,只不过这里用的是光而不是声音。
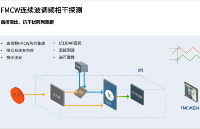
FMCW则采用了不同的思路,它不发射激光脉冲,而是持续发射频率连续变化的激光。通过对比发射频率和接收到的反射频率之间的差异,不仅能计算出距离,还能直接获取物体的速度信息。这种思路其实和车上常用的毫米波雷达类似,只不过将无线电波换成了激光。
这两种技术为激光雷达提供了两套不同的感知方案,一个靠测量时间,一个靠分析频率,各有千秋。那么在实际的自动驾驶应用中,它们谁更胜一筹?各自又有哪些优势和局限呢?
ToF激光雷达:成熟、简单、但有明显局限
目前,绝大多数商用自动驾驶辅助系统(ADAS)及部分自动驾驶方案采用的都是ToF激光雷达。这主要得益于该技术成熟度高、供应链完善且成本相对较低。它的运作方式直观,简单概括就是发脉冲、测时间、算距离,系统硬件设计相对简单,量产性能稳定。这也是为什么很多车企现阶段用的激光雷达都是ToF技术的原因。
ToF激光雷达的优势在于设计和制造难度相对较低,其核心的光源和探测器组件在业内已经非常成熟。它能实现较高的点云密度与分辨率,这对自动驾驶所需的环境精细感知至关重要。目前,市面上多数ToF激光雷达在测距能力、视场角、点云质量等方面已能够满足自动驾驶系统的基本需求。特别是在成本与量产方面,ToF已形成成熟的供应链,单价从早期的数万元乃至更高,大幅降至几百到几千元级别,有力推动了自动驾驶传感器的普及应用。
简单实用并不意味着完美,ToF激光雷达也存在很多问题。ToF激光雷达测距范围与性能受到激光功率和人眼安全规范的限制。由于人眼安全标准严格约束了发射能量,主流ToF激光雷达多采用905纳米波段的短脉冲激光,导致其在探测远距离、低反射率物体(如黑色轮胎、远处行人)时表现吃力。高阶自动驾驶一般需要200米以上的有效探测距离以提升安全冗余,这对ToF系统而言并不容易实现。
ToF激光雷达还会出现所谓的“耀斑效应”或光晕现象。当激光照射到高反射表面(如交通标志、反光背心)时,回波信号过强,容易使接收器饱和,从而淹没其他真实信号,导致点云中出现局部失真或虚假数据。尽管可通过算法滤波进行缓解,但该问题难以根本消除。
此外,ToF系统在多个激光雷达同时工作的场景中,易受到相互间的干扰。尤其在车流密集时,其他车辆发射的激光脉冲可能引发误检测或噪声。虽然已有编码调制、频率跳变等技术用于区分信号,但ToF在抗干扰能力上并不具备先天优势。
FMCW激光雷达:技术前沿的“潜力股”,但还没真正全面成熟
相较于ToF,FMCW激光雷达则采用了另一种测距原理。它持续发射频率随时间规律变化的连续激光,通过比较发射信号与回波信号的频率差异,不仅能计算出目标的距离,还能直接获取其径向速度。这项技术在雷达领域已应用多年,但在激光雷达中仍属较新的发展方向。
FMCW的一个显著优势在于其天生具备测速能力,无需像ToF那样依赖多帧点云对比来推算速度。这对自动驾驶感知意义重大,系统可在单次扫描中直接区分静止与运动物体,并获取精确的速度信息,从而为应对行人、车辆等动态目标的快速接近提供更及时的数据支持。
此外,基于频率调制的特性,FMCW在接收端可通过与本地参考信号进行混频,实现对微弱回波信号的放大与提取。这种处理方式提升了系统对远距离、低反射率物体的探测灵敏度。FMCW的信号处理方法本身还具有一定的抗干扰潜力,在应对强光或其他光源干扰时会表现得更稳定。
当然,与成熟的ToF方案相比,FMCW并不是那么容易落地。其系统构成更为复杂,需要高度线性的频率调制、精密的本地振荡器以及复杂的模拟与数字信号处理链路。想要将其应用到车端,这些组件不仅需满足车规级可靠性与稳定性要求,还要在大规模量产中保持一致性,实现难度和成本显著高于ToF。
FMCW对信号处理的要求也更高。为准确提取距离与速度信息,系统需运行更复杂的算法,并依赖高速模数转换器与高性能处理单元,这不仅增加了硬件成本,也对功耗和散热提出了更高要求。在车载资源受限且可靠性要求严苛的环境中,这些因素都影响着技术的实用化进程。
目前真正达到车规级量产、具备稳定供应能力的FMCW产品仍然寥寥。相关技术尚处于发展完善阶段,供应链体系与成本控制能力仍未完全成熟,因此短期内难以全面替代ToF。
谁将赢得未来?
从前面的介绍中,其实已经可以很明显地得出ToF现阶段更具优势的结论,那就聊聊未来谁会更具优势吧!之所以现阶段大部分部署在生产车上的激光雷达采用ToF方案,是因为它更成熟、量产能力更强、成本更合理,足以支持大部分自动驾驶功能。车辆制造商和供应链都对这种技术非常熟悉,这意味着它可以实现大规模部署。
FMCW激光雷达凭借其理论上的速度测量能力、对弱目标的敏感性以及潜在的抗干扰性能,在一些高端自动驾驶研发项目里受到关注。它更像是一种远期愿景技术,未来随着成熟度提升、生产规模放大后或将逐步进入市场。
未来可能出现的其实是一种分层感知架构,ToF激光雷达负责常规三维感知任务,而某些高级自动驾驶平台可能进一步结合FMCW激光雷达或类似技术来加强速度测量、性能冗余等功能。
从产业发展趋势来看,没有一种技术可以彻底“淘汰”另一种技术,更可能是融合与演进。ToF在短期内依然是主流,而FMCW则有可能在一些高要求应用或者结合更高集成水平的车载感知系统里发挥更大的作用。
总的来说,ToF激光雷达是目前自动驾驶感知的“主力军”,因为它成熟、可靠、可量产,并且性能已经能够满足绝大多数使用场景。FMCW激光雷达则代表了未来更高性能的方向,具有速度探测和潜在更强抗干扰的优势,但要真正覆盖市场,仍待技术进一步成熟、成本持续下探与产业链全面完善。
-
FMCW
+关注
关注
9文章
115浏览量
24392 -
激光雷达
+关注
关注
983文章
4597浏览量
197411 -
TOF
+关注
关注
9文章
553浏览量
38710 -
自动驾驶
+关注
关注
795文章
15057浏览量
182001 -
激光脉冲
+关注
关注
0文章
90浏览量
10676
发布评论请先 登录
为啥自动驾驶不使用1550纳米激光雷达?

TOF激光雷达在汽车避障上的应用

4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

调频连续波(FMCW)为什么是自动驾驶激光雷达的未来?

【科研动态】新一代集成光子FMCW激光雷达光源的设计框架与性能权衡

自动驾驶激光雷达会伤害人体吗?

从原理到量产:FMCW激光雷达的核心技术体系与突破方向

硅光加持下的感知革命:FMCW 激光雷达技术全景解读
激光雷达为什么会出现串扰的问题?

自动驾驶里的激光雷达有何作用?

决定自动驾驶激光雷达感知质量的因素有哪些?

自动驾驶只用激光雷达进行感知会有哪些问题?
FMCW激光雷达,加速落地工业场景
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?




评论