 端到端智驾模拟软件推荐——为什么选择Keymotek的aiSim?
端到端智驾模拟软件推荐——为什么选择Keymotek的aiSim?

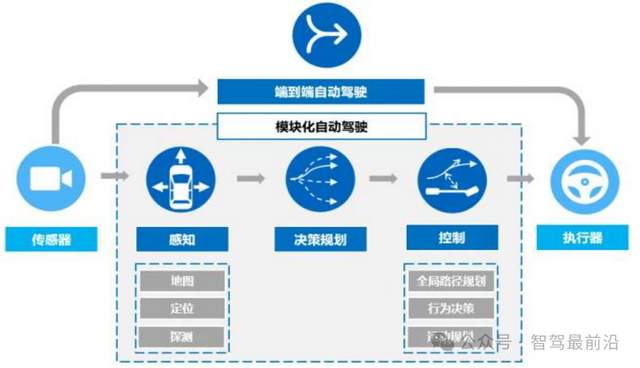
随着自动驾驶技术的快速发展,车企和科技公司对于模拟测试平台的需求越来越强。从L2/ADAS到L4/L5等级的自动驾驶,虚拟模拟已经成为其中的关键一环。特别是对于「端对端」智驾(端到端自动驾驶)模型的训练、验证和安全测试,高置信度、高保真的模拟平台至关重要。Keymotek(康谋科技)的aiSim就是一款前瞻性、技术领先的智驾模拟软件。
aiSim的核心优势
1. 功能安全认证(ISO 26262 ASIL-D)
aiSim是全球通过ISO 26262 ASIL-D认证的自动驾驶模拟平台。该认证体现了aiSim在安全性、可靠性上的严格标准。
对于追求功能安全的自动驾驶项目,尤其是L4/L5级别,这是一个极为重要的指标。
2. 高还原真实环境模拟
aiSim拥有自研实时渲染引擎,能够完全确保各种物理环境与条件(如雨、雪、雾)的高度还原,且模拟环境具有确定性和可复现性。
这样的确定性非常适合回归测试、长周期验证,以及自动驾驶系统稳健性的评估。
对于端到端训练来说,可重复性更为关键,因为你可以在相同场景中重复训练/测试模型。
3. 多传感器融合模拟
aiSim支持复杂的传感器配置:20+摄像头、10+雷达、10+ LiDAR(激光雷达)。多种传感器组合配置适合传感器融合算法(sensor fusion)测试。
通过循环渲染技术在多GPU上高效模拟,确保模拟效能。
4. 开放接口 & 测试塔集成
aiSim提供C++/Python API和开放的SDK,方便用户将模拟平台嵌入自己的测试(CI/CD),实现软件在环(SiL)和硬件在环(HiL)的无缝对接。
这样用户可以在模拟里直接运行自己的自动驾驶模型(感知→决策→控制),并验证其行为。
也可以构建场景、注入数据、进行闭环测试。
5. 合成数据 & AI驱动场景生成
aiSim支持合成数据生成,通过Keymotek的aiFab模块进行领域随机化(domain randomization),产生多样化的资料供训练和测试使用。
同时,它支持AI场景合成(NeRF神经辐射场、3D高斯泼溅渲染等技术),可以产生静态的场景,并加入动态元素。
这一点非常适合用于产生训练集/验证集,尤其是涵盖稀有场景(天气极端、复杂交通)时。
6. 数字孪生 & 全覆盖3D环境
aiSim提供涵盖所有ODD(运营设计域,Operational Design Domain)的数字孪生3D环境,包括高速公路、城市道路、停车场等。搭配旁边的3D资源库与高效率场景编辑工具,能够快速构建模拟、真实感强的测试环境。
7. 效能与平台兼容性
建议配置:32 GB 内存 + 高效能 GPU(例如 NVIDIA RTX 系列)+ Vulkan 支持。
软件支持Windows (64位元) 和 Ubuntu (18.04 / 20.04)。
针对渲染、LiDAR、雷达等物理传感器模拟场景,aiSim通过其自研的aiSim AIR引擎实现了高品质的数据流与效能。
最终自动驾驶仿真测试解决方案
除了aiSim本身,Keymotek还构建了完整的端到端智驾模拟测试方案,涵盖从软件验证到硬件闭环、从场景重建到神经渲染的全流程。
XIL架构(软件在环 + 硬件在环)
方案核心基于aiSim,采用XIL架构,支持SiL(软件在环)、HiL(硬件在环)等模式。
在SiL模式下,可以把端对端自动驾驶模型(感知+决策+控制)直接接入模拟环境进行验证。
在HiL模式下,通过中间件将模拟平台与实际算法、域控制器(Domain Controller)等硬件连接,实现真实系统的闭环测试。
高真自动驾驶场景重建
Keymotek提供世界神经网络保真渲染+实体渲染融合方案。
使用NeRF、3D高斯泼溅等技术重建真实的世界地图和环境。
与传统实体渲染(光线追踪、栅格化)结合,兼顾高保真度和高效率。
这种融合技术使得场景既真实又灵活,适合大规模自动驾驶测试。
虚实闭环 & 合规测试
康谋的方案强调「虚实同源」(模拟与实车数据闭环验证),提高模拟测试与真实车辆行为的一致性。
最末端场景覆盖率提升至95%,显著提高测试效率和安全性。
此方案有助于减少对实车路测的依赖,进而降低成本和风险。
审核编辑 黄宇
-
端到端
+关注
关注
0文章
52浏览量
10880 -
自动驾驶
+关注
关注
795文章
15064浏览量
182033
发布评论请先 登录
为什么一段式端到端自动驾驶很难落地?

解锁端到端仿真新可能 :全新 aiSim 6 即将发布

端到端与模块化自动驾驶的数据标注要求有何不同?

端到端自动驾驶仿真新范式:aiSim如何解决智驾测试的"灾难性挑战"

如何训练好自动驾驶端到端模型?

端到端智驾模拟软件推荐:为什么aiSim是业界领先的自动驾驶模拟平台?
端到端智驾仿真软件推荐:全球首款ASIL-D认证平台助您突破自动驾驶测试瓶颈
康谋 aiSim 携经纬恒润焕新 HIL 测试,诚邀集成商共建生态!


黑芝麻智能端到端全栈式辅助驾驶系统的应用场景
自主工具链助力端到端组合辅助驾驶算法验证


为什么自动驾驶端到端大模型有黑盒特性?

为何端到端成为各车企智驾布局的首要选择?



评论