 GNSS模拟器如何赋能自动驾驶?聚焦HIL、多实例与精准轨迹仿真的技术优势
GNSS模拟器如何赋能自动驾驶?聚焦HIL、多实例与精准轨迹仿真的技术优势

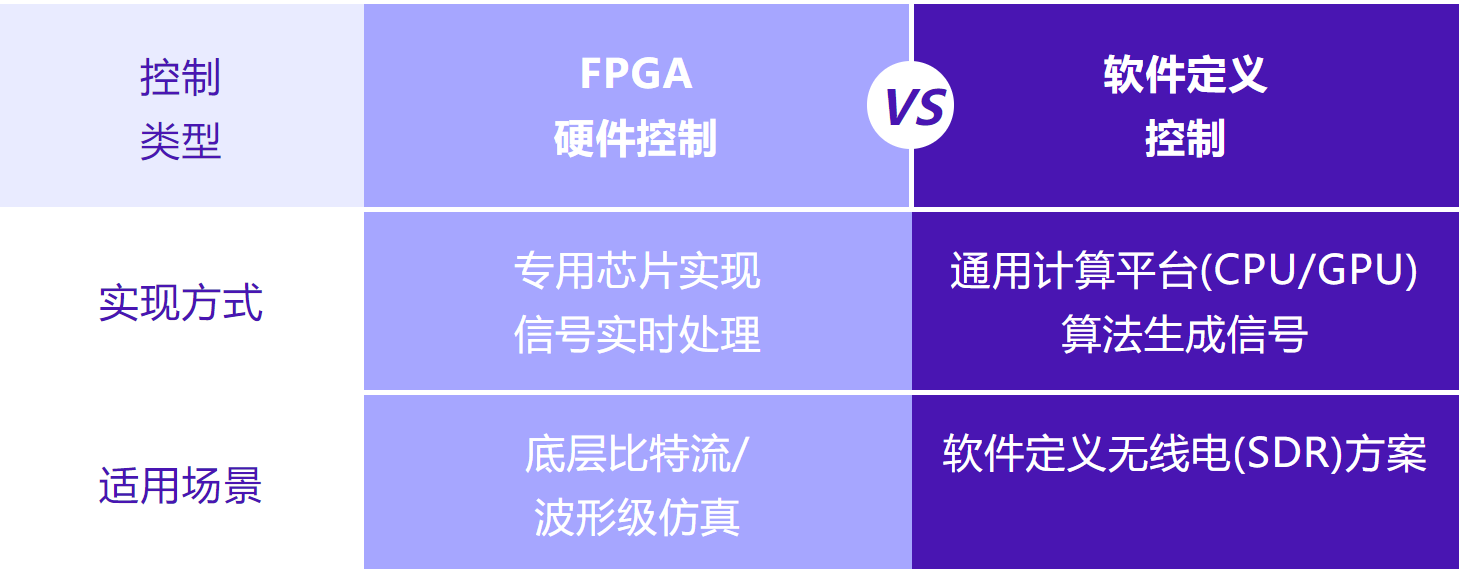
上期,我们探讨了德思特基于软件定义架构的GNSS模拟器及其核心——Skydel仿真引擎的特点。 该方案支持多实例并行、具备较低延迟,并关注自动化与扩展性,利用CPU/GPU在通用计算平台动态生成信号,旨在为测试工作提供相较于传统FPGA方案更多的灵活性与开发便利。
技术特性为我们提供了新的可能性,那么如何更好地将其融入实际测试流程?本期,我们将跟随德思特技术团队的经验分享,一同了解一线应用的关键环节。
硬件配置与信号需求
问:
答:
DTA-2116的带宽是100MHz、工作频率是35-3125MHz(包含了L1L2L5L6S),因此每张卡均可进行任意GNSS频段的仿真,但同一时间仅能进行单独频段的仿真。使用多张SDR主要是为了实现同时对于多个频段的仿真,即多频仿真。
问:
实际测试中需要多少种信号完成定位?
答:
这个问题的答案取决于接收机厂商对于芯片的设计,一般而言单独的GPSBEIDOU等的L1频点就可以实现定位,如果想要更好的定位效果与抗干扰能力,通常会使用多个星座多个频段同时工作,即多星多模。
仿真操作与场景设置
问:
德思特GNSS模拟器中定义仿真轨迹的Vehicle Simulation与Track Playback的区别?Trajectory中Vehicle Simulation
与Track Playback的区别?
答:
Vehicle Simulation 使用是路线,文件中包含各位置的速度,通过模拟后能够获得轨迹。
Track Playback 使用的是轨迹,文件中包含的是各时间点的位置(如 NMEA),轨迹存在地面/水面或空中/太空两种模式的插值。
问:
Skydel参数设置重点关注项?
答:
三个要素:星座频点+时间+轨迹
两个关键点:功率大小、仿真的传播模型
问:
卫星功率设置的是发射功率还是接收功率?
答:
GNSS模拟器模拟的是到达接收机前端的信号功率,我们在设备内控制信号的大小变化是对接收机前端信号大小的直接控制,但实际上实现原理讲是对卫星发射功率的控制。
应用场景与优势
问:
德思特GNSS模拟器在自动驾驶测试中的核心优势?
答:
高兼容性:
无缝集成dSpace/Carmaker/VTD等平台;支持V2X/C-V2X/T-box测试场景。
硬件在环(HIL)仿真:
业界领先的低延迟控制(毫秒级响应);
实时数据回传与位置动态调整。
全球轨迹复现:
通过KML/CSV地图导入实现海外路况本地仿真;大幅降低实地测试成本。
多维交通模拟:
支持街道地图导入;
静态/动态轨迹快速部署。
多实例扩展:
双天线测试;
车队协同仿真;
RTK高精度定位验证。
多传感器融合:
提供IMU仿真接口;
支持GNSS+IMU联合测试场景。
审核编辑 黄宇
-
仿真
+关注
关注
55文章
4539浏览量
138690 -
模拟器
+关注
关注
2文章
1026浏览量
45861 -
GNSS
+关注
关注
9文章
1014浏览量
51414
发布评论请先 登录
aiSim 5.11.0 正式发布:动态落叶、HiL工具链、资产库全面升级!

GNSS 模拟器选型推荐:自动驾驶与RTK高精度定位测试如何选型?

多星座GNSS卫星导航信号模拟器的应用,卫星导航星座模拟器,卫星导航模拟器
GNSS卫星导航模拟器的功能与应用介绍,gnss导航模拟器,gnss卫星模拟器
自动驾驶汽车为什么会发生轨迹漂移?

汽车自动驾驶的太阳光模拟应用研究


索尼FCB-EV9520L机芯如何赋能自动驾驶安全

GNSS模拟器核心架构如何实现?技术主管深度解读设计原理
太阳光模拟器 | 在汽车自动驾驶开发中的应用
自动驾驶汽车在隧道、山区如何精准定位?

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车是如何准确定位的?




评论