 GNSS模拟器核心架构如何实现?技术主管深度解读设计原理
GNSS模拟器核心架构如何实现?技术主管深度解读设计原理

GNSS 模拟器技术领域的核心难点,如何有效应对?本期,我们邀请德思特技术主管,聚焦大家最关心的关键问题,带来深度解析与经验分享。精华要点抢先看
系统组成与核心引擎
提问:德思特GNSS模拟器的主要组成部分?
德思特GNSS模拟器采用先进的软件定义无线电(SDR)架构,其核心构成包括以下几个关键部分:
● SSE
设计灵活的仿真引擎
可作为软件解决方案与第三方硬件集成
● CPU & OS
提供基础计算平台和系统运行环境
加速信号处理流程
● SDRs
实现信号的软件定义和灵活配置
提问:德思特GNSS模拟器的Skydel仿真引擎有哪些特点和优势?
Skydel仿真引擎是德思特解决方案的核心竞争力,其特点和优势体现在以下几个方面:
核心优势
●多实例支持
一套软件可同时仿真多个接收器/场景
传统模拟器难以实现
●超低延迟
HIL(硬件在环)延迟最低达5ms
适用于自动驾驶等实时控制系统
●强自动化能力
支持 Python/C++/C# API 控制
可脚本化生成/导出测试流程
●高扩展性
支持商用现成(COTS)硬件
可集成多GPU并灵活更换
支持用户自定义信号(无需硬件升级)
高级功能
●高精度信号生成
精确模拟卫星信号传播特性
多径效应、电离层延迟等
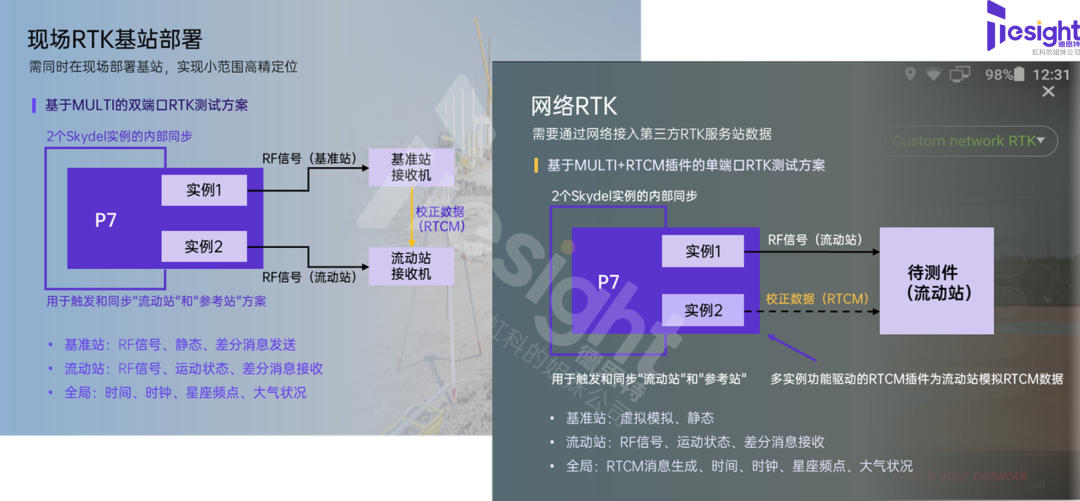
●复杂场景支持
适用于双天线、RTK等高级测试场景
HIL(硬件在环)延迟最低达5ms
适用于自动驾驶等实时控制系统
●自动化测试
通过API实现测试流程自动化
支持批量执行
●插件生态
支持自定义插件开发及插件库调用
GNSS频段基础
提问:GNSS, Upper L-Band和GNSS,Lower L-Band就是指L1和L2,L5,L6吗?
这种划分主要依据频率范围:
● Upper L-Band (1500MHz以上)
主要包含GNSS的 L1 频段
● Lower L-Band (1500MHz以下)
主要包含GNSS的 L2、L5、L6 频段
● 补充频段
S band
控制模式与架构理念
提问:软件定义是什么意思?
软件定义无线电(SDR)的本质是:
通过软件算法在通用硬件上动态实现传统专用硬件的功能,实现"硬件资源虚拟化"。
这带来了显著的配置灵活性、升级便捷性和功能扩展潜力。
提问:程序控制上和传统硬件控制有什么区别?
这涉及到两种根本不同的架构设计:
架构原理对比
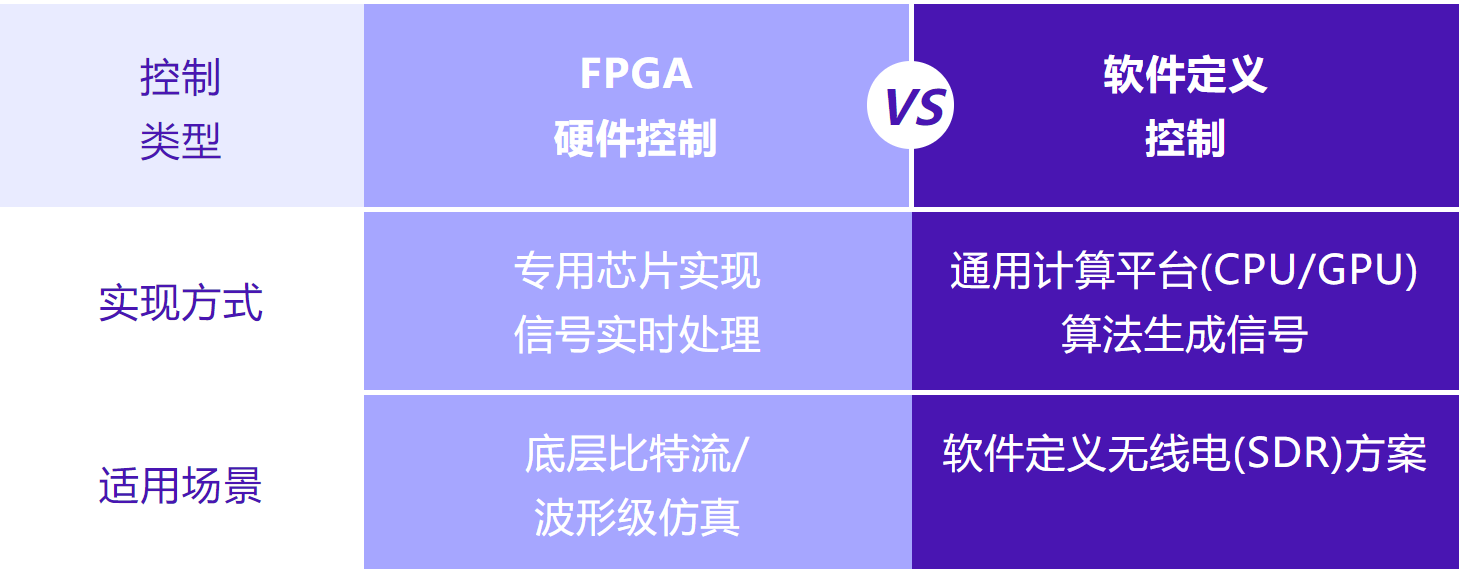
核心差异
灵活性与扩展性
开发周期长
● 软件定义控制
动态配置星座/频段/轨迹/误差模型
支持插件快速扩展
开发部署效率
● FPGA硬件控制
需专用硬件开发流程
调试困难
● 软件定义控制支持
支持脚本控制和自动化测试
适合研发阶段快速迭代
是否
-
模拟器
+关注
关注
2文章
1024浏览量
45836 -
GNSS
+关注
关注
9文章
1012浏览量
51401
发布评论请先 登录
GNSS 模拟器选型推荐:自动驾驶与RTK高精度定位测试如何选型?

多星座GNSS卫星导航信号模拟器的应用,卫星导航星座模拟器,卫星导航模拟器
GNSS卫星导航模拟器的功能与应用介绍,gnss导航模拟器,gnss卫星模拟器


如何挑选一款gps北斗导航卫星信号模拟器 导航卫星模拟器 gps模拟信号发生器

使用德思特GNSS模拟器实现RTK基站与流动站的独立模拟



太阳光模拟器丨什么是AAA级标准?

软件定义架构如何满足GNSS模拟测试的开放性需求?




评论