 速看!发那科机器人做为profinet转ethernetip主站参数设置,每步都关键
速看!发那科机器人做为profinet转ethernetip主站参数设置,每步都关键

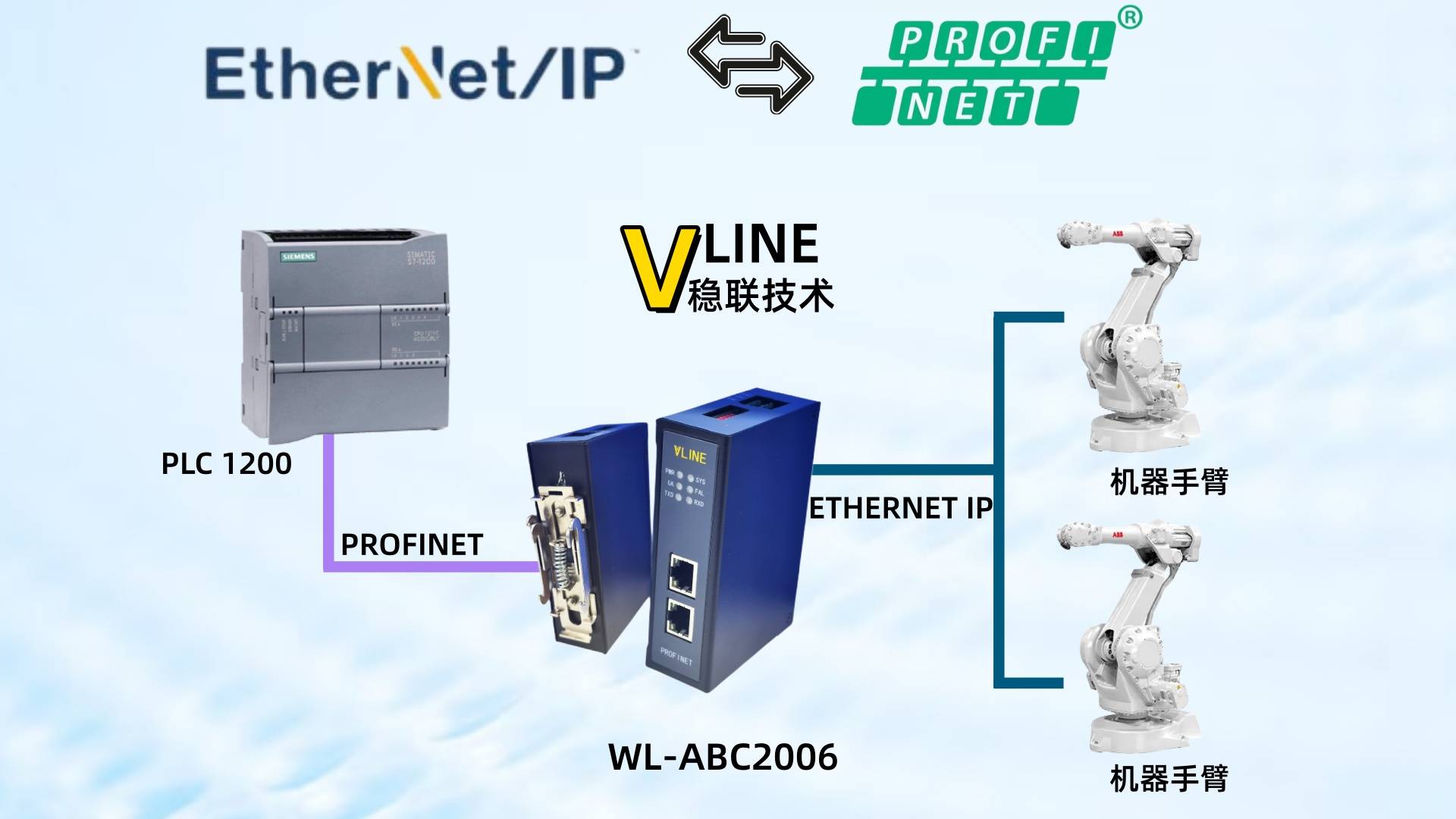
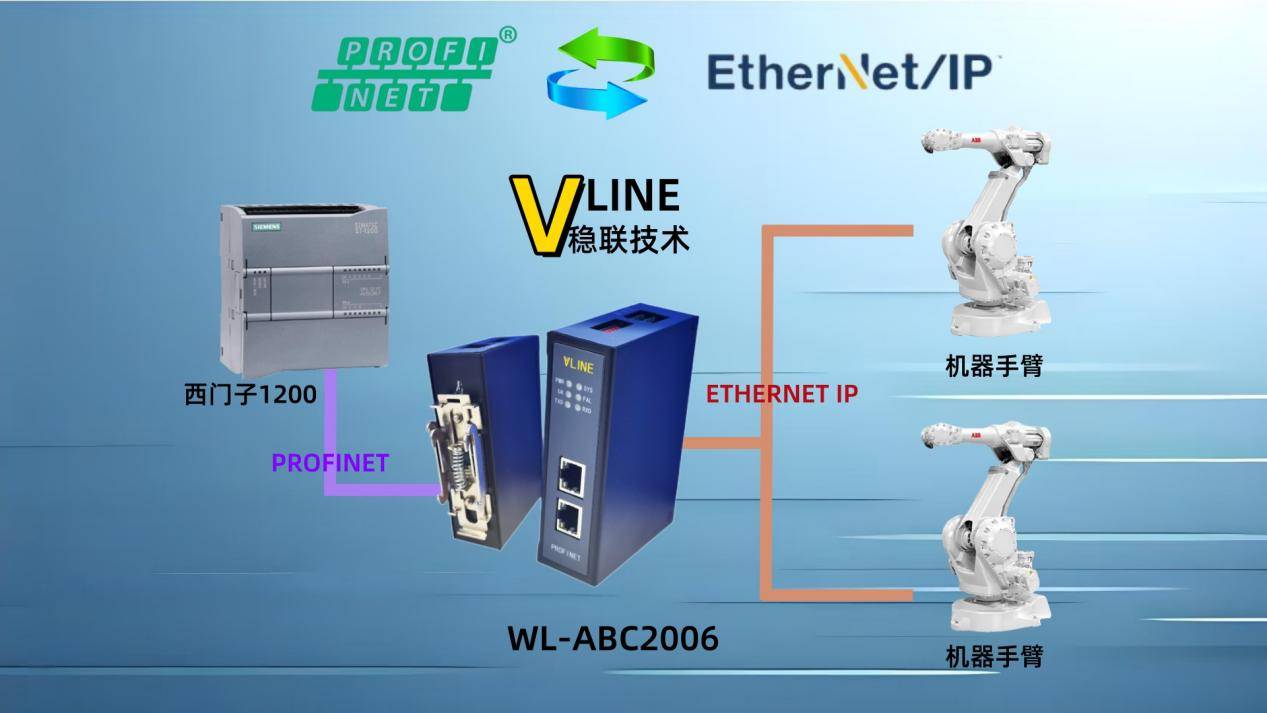
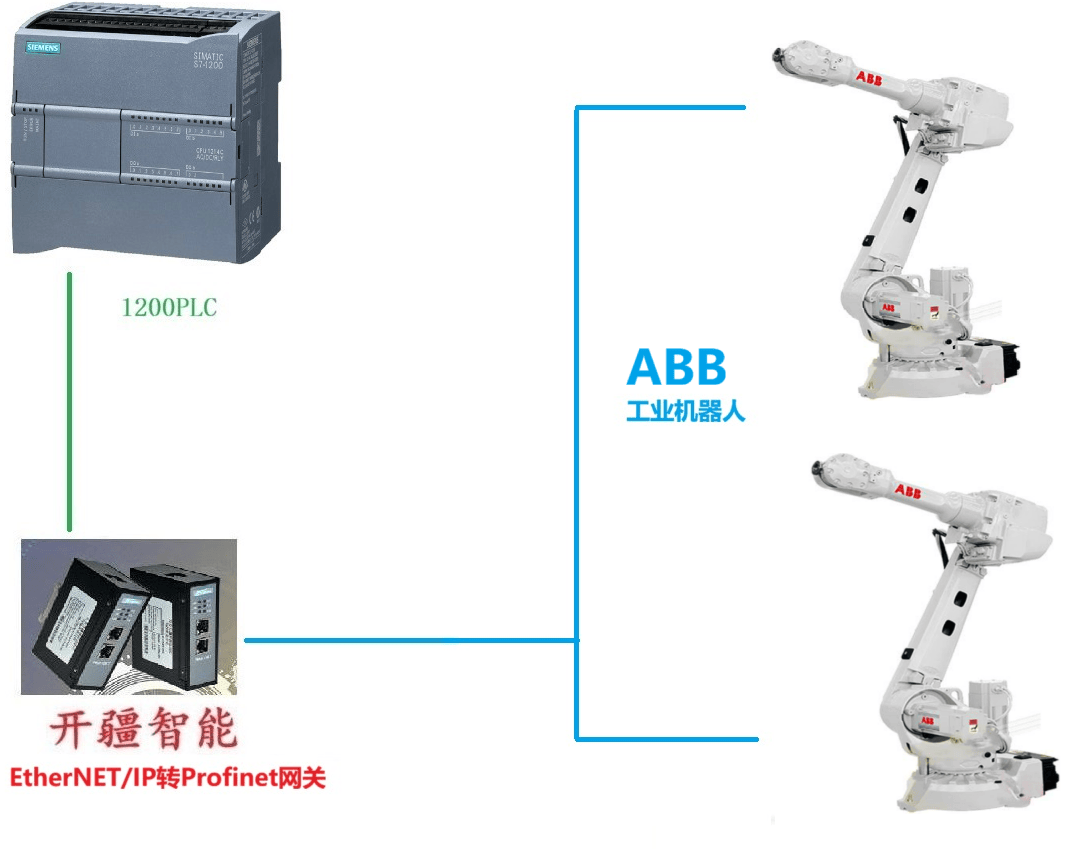
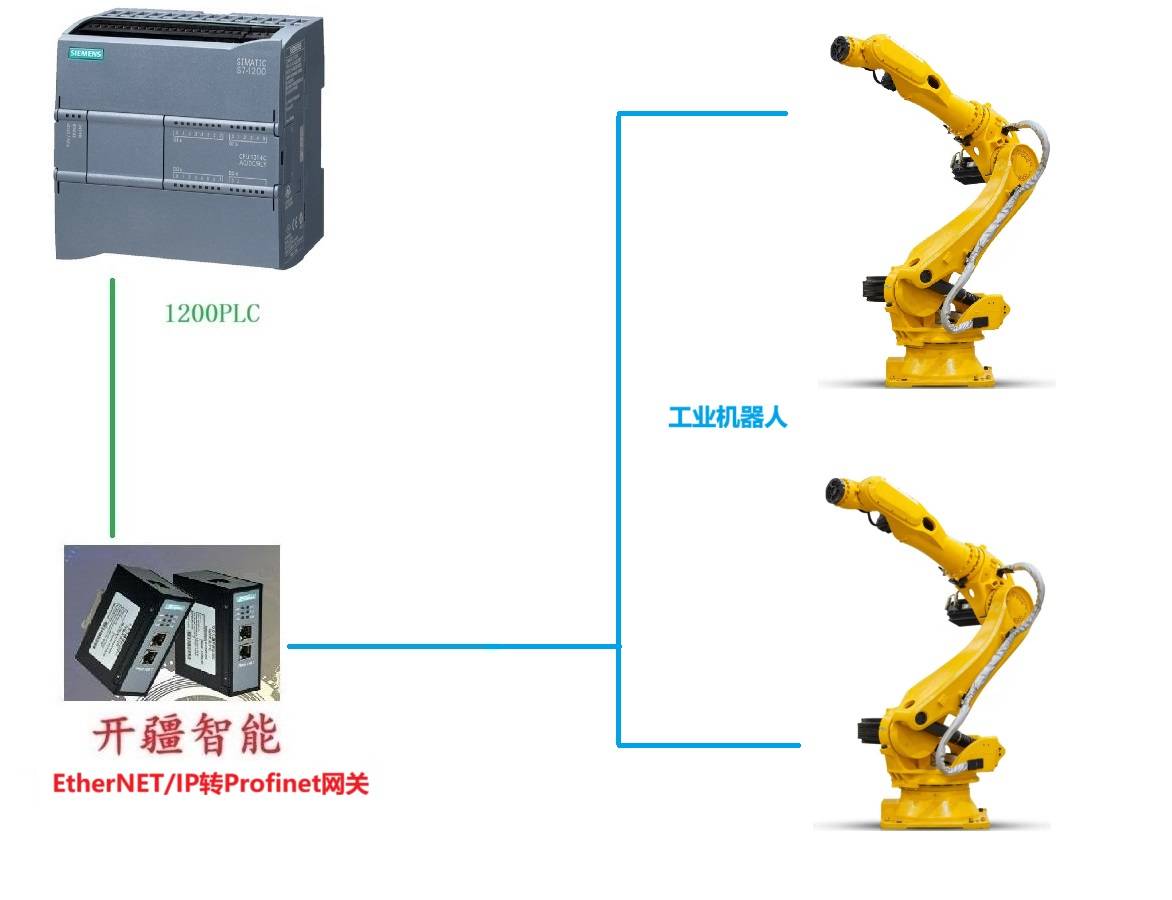
本次和大家一起聊一下倍讯科技profient转ethernetip网关(bx-606-eip)连接发那科机器手臂,机器手臂Ethernetip端如何设置。机器手臂作为网关的主站,需要在机器手臂的参数界面上进行调整。比如,调整主、从站,以及字节数和IP地址的对应。下面一起看一下机器手臂的参数如何调整。

发那科机器手臂作为主站时,不同的通信场景和从站设备参数设置会有所差异,以下以常见的EtherNet/IP通信为例介绍参数设置步骤:
前提条件
确保发那科机器人控制器已正确安装且运行正常,并且已经连接到目标网络。同时,了解要连接的从站设备(如I/O模块、其他智能设备等)的详细信息,包括设备型号、通信规范等。
参数设置步骤,进入系统设定界面
在发那科机器人示教器上,按下“MENU(菜单)”键。在弹出的菜单中,选择“系统”选项。找到主机通讯选项页面。
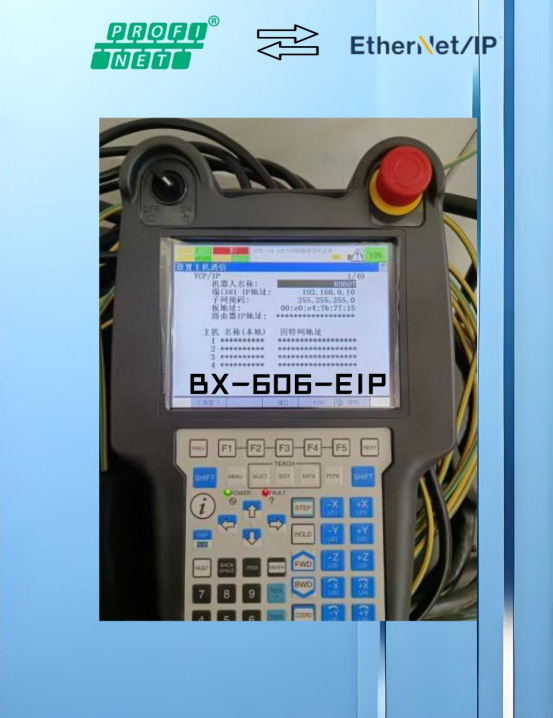
找到TCP/IP选项这个选型

设置网络参数
在系统设定页面中,找到“网络”或“通信”相关选项。选择“EtherNet/IP”设置项。设置机器人主站的IP地址、子网掩码、默认网关等基本网络参数。这些参数应与实际的网络环境相匹配。例如,IP地址可以设为192.168.0.10,子网掩码255.255.255.0,默认网关192.168.0.1(具体数值根据实际网络确定)。倍讯科技profient转ethernetip网关(bx-606-eip)的Ethernet ip网口的地址网段一致。
调整机器人连接的远程I/O的IP地址即网关ethernet端的IP地址
配置从站设备
点击“添加从站”按钮,开始扫描网络中的EtherNet/IP从站设备。扫描完成后,从列表中选择要连接的从站设备,并点击“确定”。根据从站设备的说明书,设置从站的相关参数,如设备实例ID、数据映射等。例如,如果从站是一个I/O模块,需要指定输入输出数据的长度和映射关系。
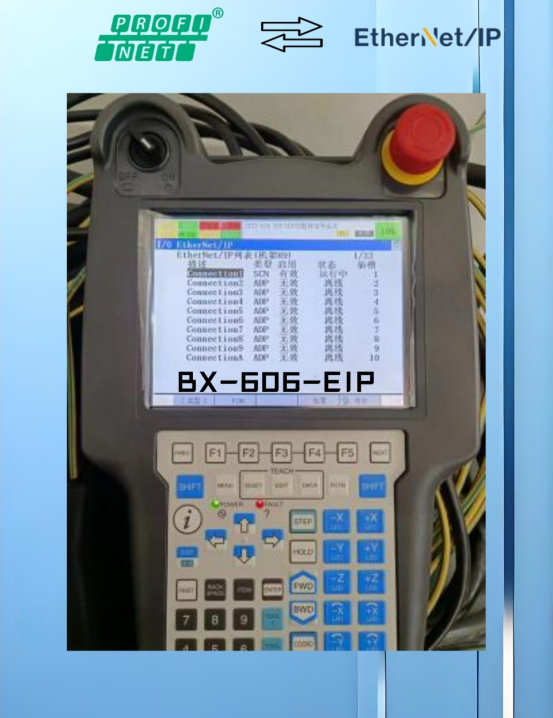
数据映射与通信设置
设置好从站IP(本例为192.168.0.5)厂商ID为170,设备类型11,产品代码1输入输出大小32个字(64字节),Assemblyinstance的输入输出为100/150即(通讯速率)。地址192.168.0.5与倍讯科技profient转ethernetip网关(bx-606-eip)的Ethernet ip网口的地址网段一致
保存与测试
完成所有参数设置后,保存配置信息,回到程序编辑界面,编写简单的测试程序,用于验证主从站之间的通信是否正常。例如,读取从站的输入数据并在示教器上显示,或者向从站输出控制信号。运行测试程序,观察通信状态和数据交互情况。如果出现错误,根据错误提示信息检查参数设置和网络连接,进行相应的调整。
以上步骤仅为一般性指导,实际操作中可能因发那科机器人型号、系统版本以及从站设备的不同而有所变化。无论机器手臂作为主站设备还是从属设备与倍讯科技profient转ethernetip网关(bx-606-eip)都可以完成数据交互
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31672浏览量
224593 -
Ethernet
+关注
关注
3文章
716浏览量
58327
发布评论请先 登录
Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南

疆鸿智能PROFINET转DEVICENET网关:发那科机器人无缝对接西门子

疆鸿智能EtherCAT转DeviceNet,发那科机器人融入倍福的“焊接红娘”

极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(下集)
极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(上集)
通讯魔法师profinet转ethernetip网关的神转换

开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
ProfiNet 转 Ethernet/IP 网关解决方案:破解头部电池企业S7-1215C与M-20iA机器人通信壁垒

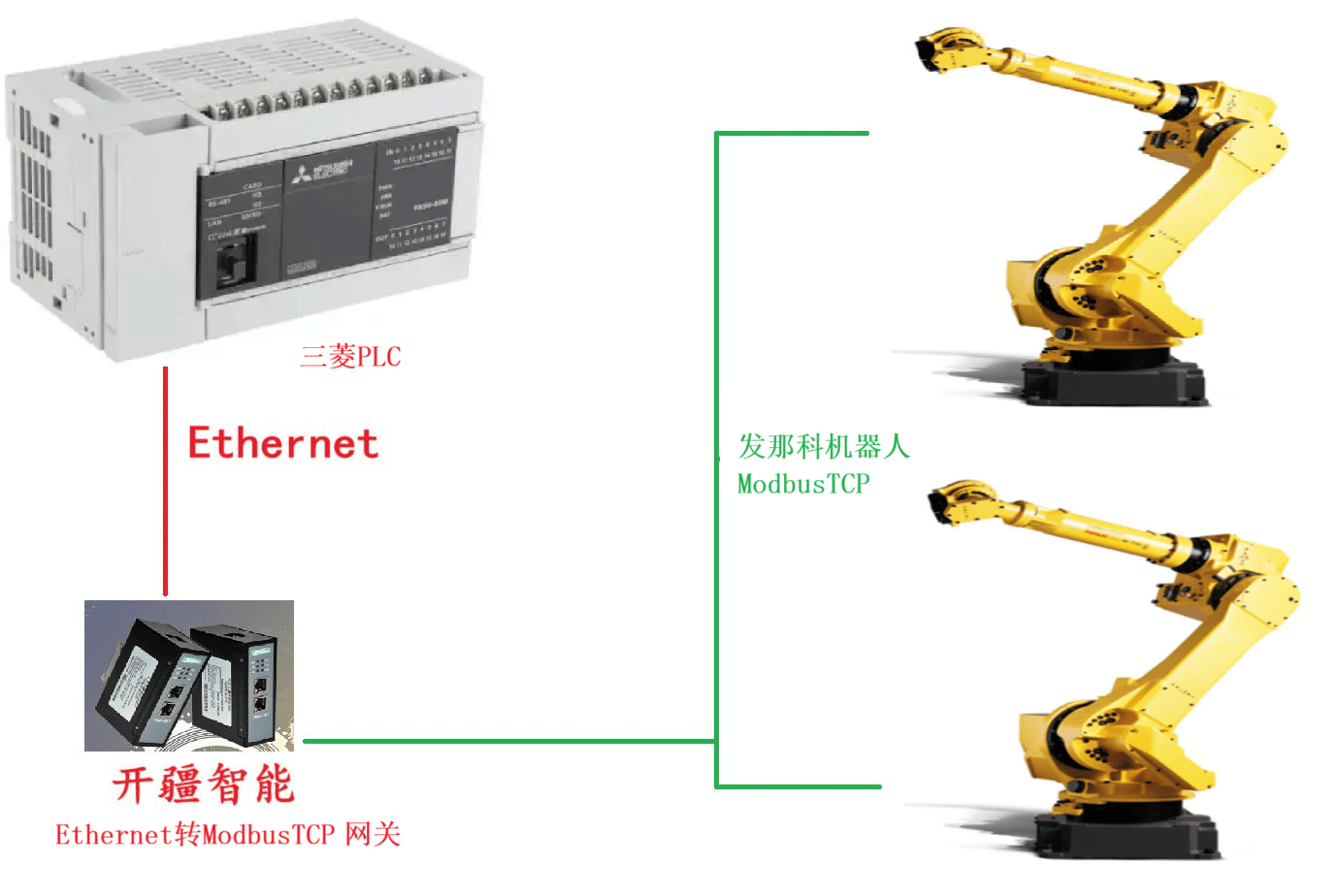
开疆智能Ethernet转ModbusTCP网关连接发那科机器人与三菱PLC配置案例
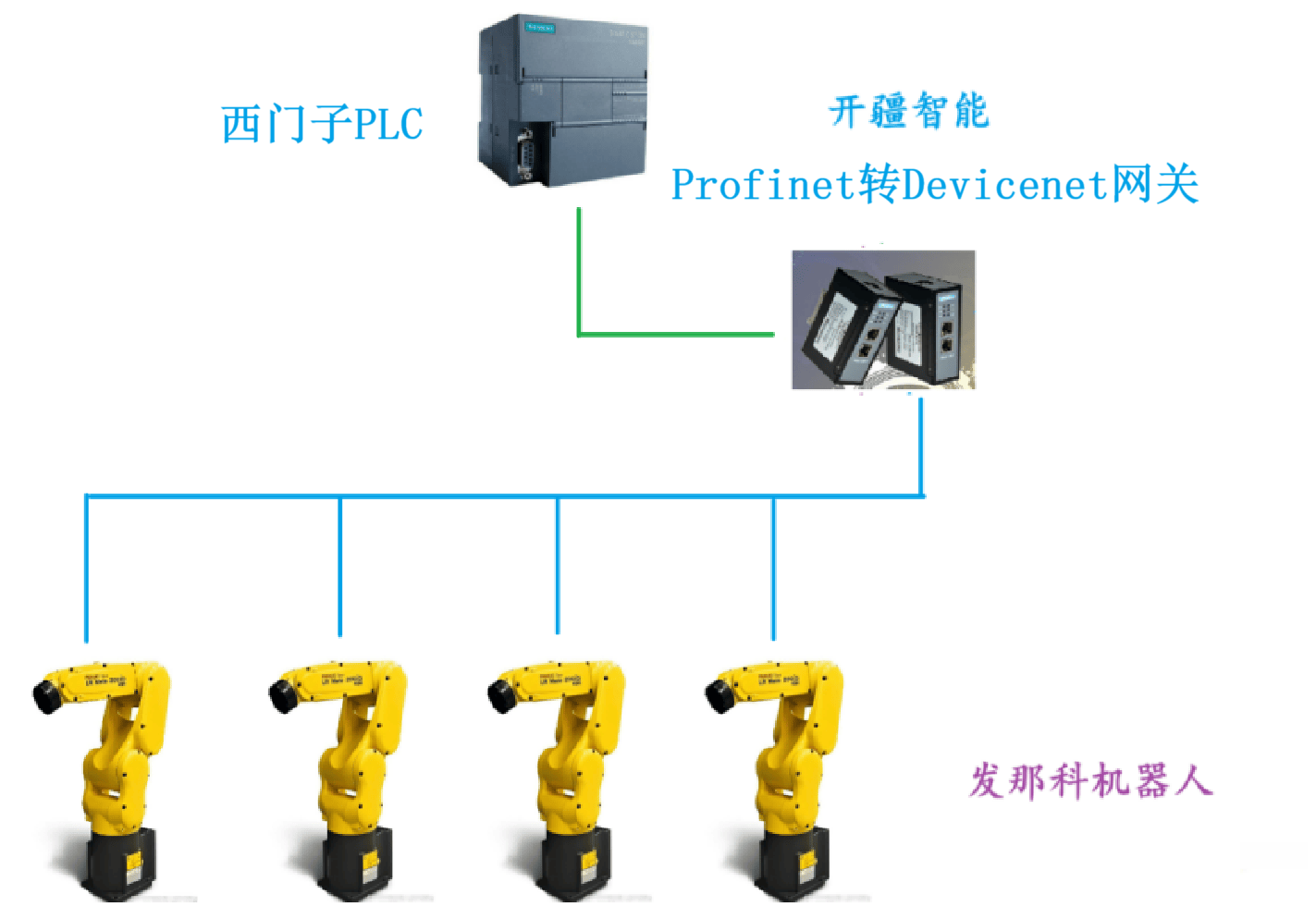
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例

颠覆智造:profinet转ethernet ip网关×发那科×西门子的三国杀

跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信




评论