 开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例

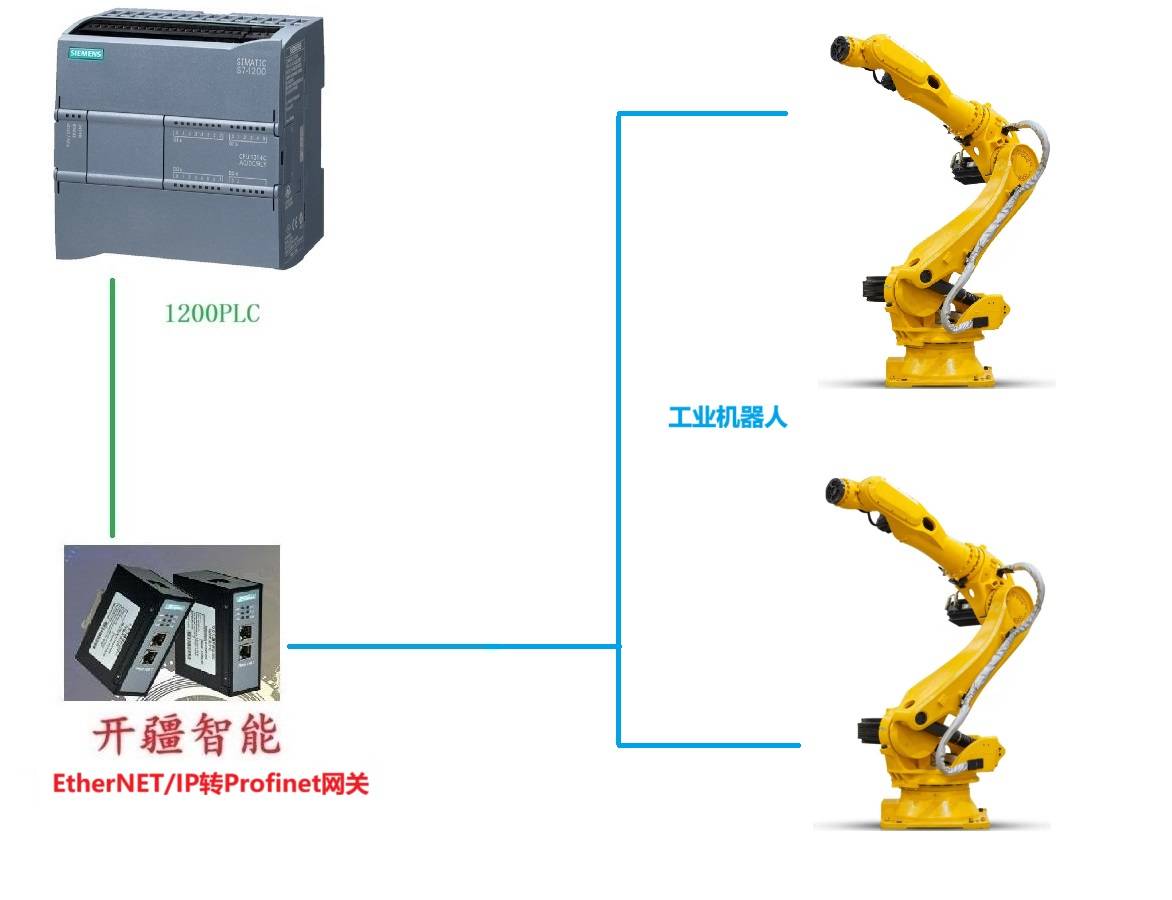
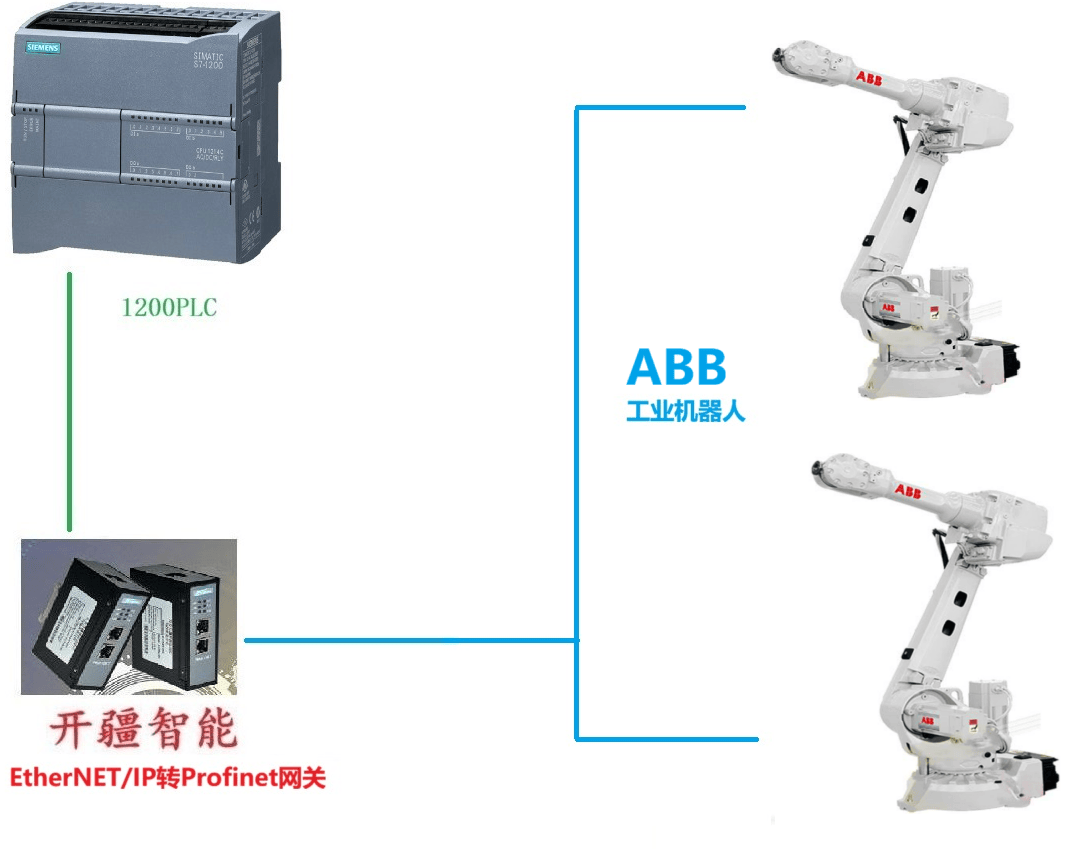
本案例是通过网关将EtherNET通讯协议的机器人接入到西门子Profinet网络之中,以便于PLC可以对机器人可以进行读写控制。
配置过程:
设置机器人 Ethernet IP 通讯从站
Ethernet IP 功能验证
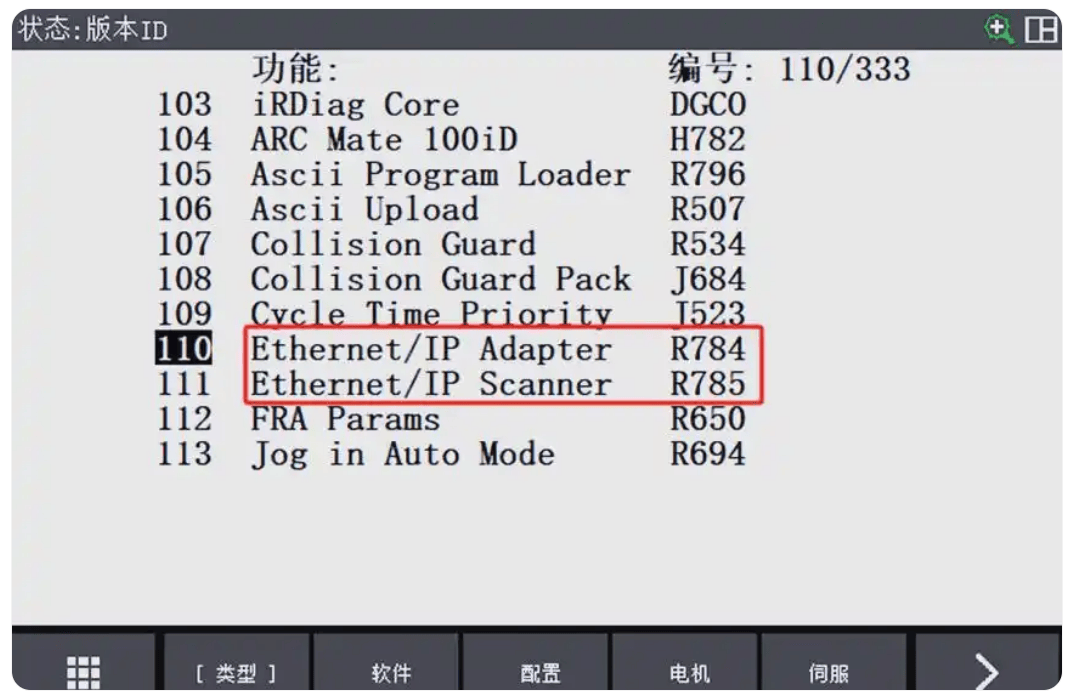
在机器人领域,Ethernet IP 通讯协议被广泛采用。若要将发那科机器人设置为Ethernet IP通讯从站,需要首先验证 Ethernet IP 功能是否已安装在机器人上。您可以通过打开MENU(菜单),进入“状态-版本ID”查看,若存在以下两个选项,则表明机器人已配备了Ethernet IP功能。
网络连接与IP设定
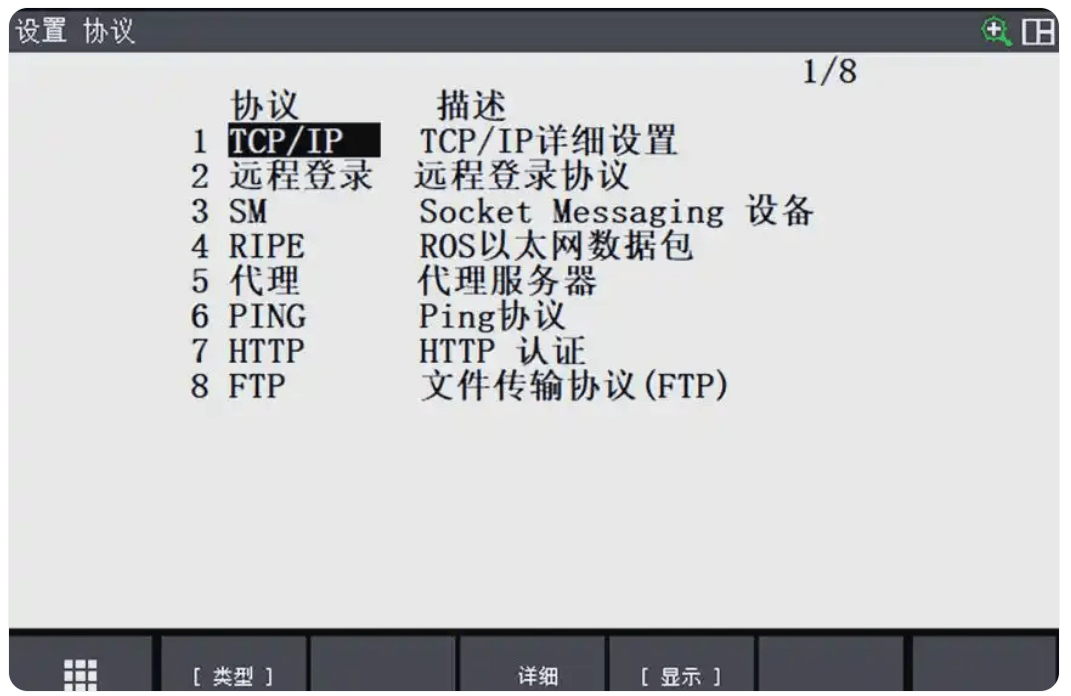
接下来,需要使用网线将机器人的网络接口与需要进行通讯的设备的网络接口相连接。在菜单中选择“设置”,然后进入“主机通讯”选项,选择第一项“TCP/IP”。
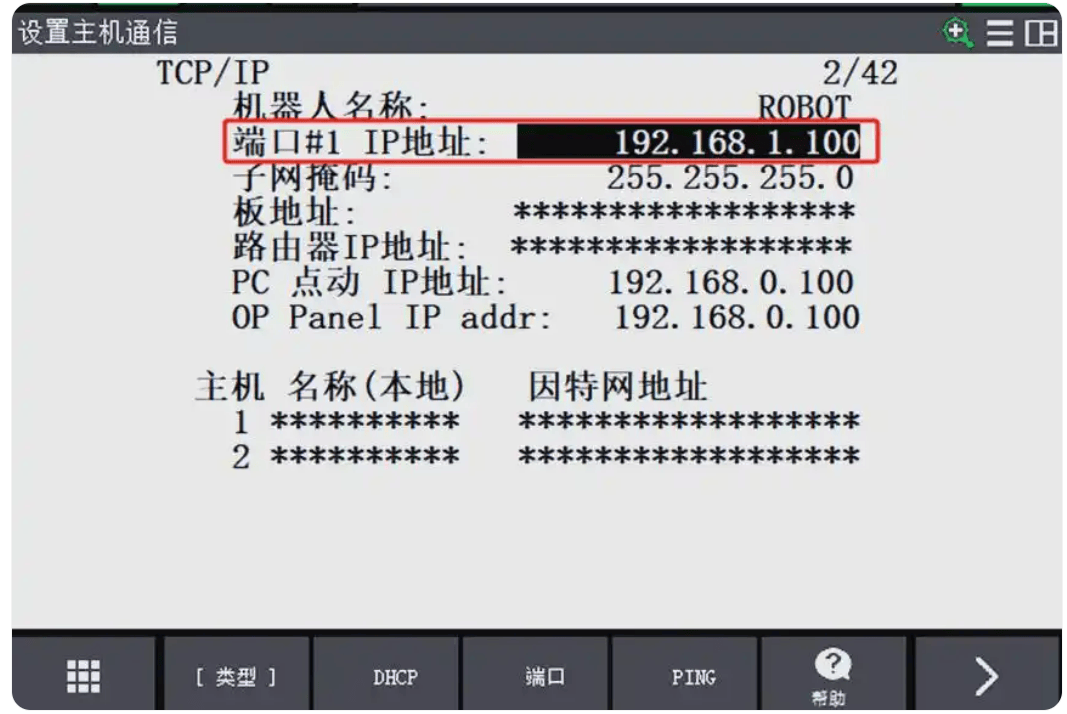
进入详细设置,选择“端口#1 IP 地址”,输入自定义的IP地址,重启机器人后,该IP地址将生效。
机器人Ethernet IP参数设置
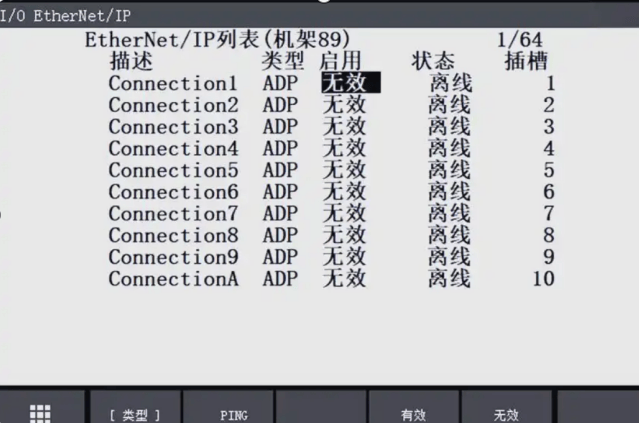
在菜单中选择“I/O-Ethernet IP”,然后选中第一行的“Connection”启用类型,并按下F5键将其设置为无效。只有在无效状态下,才能对里面的参数进行修改。
► 适配器配置和通讯测试
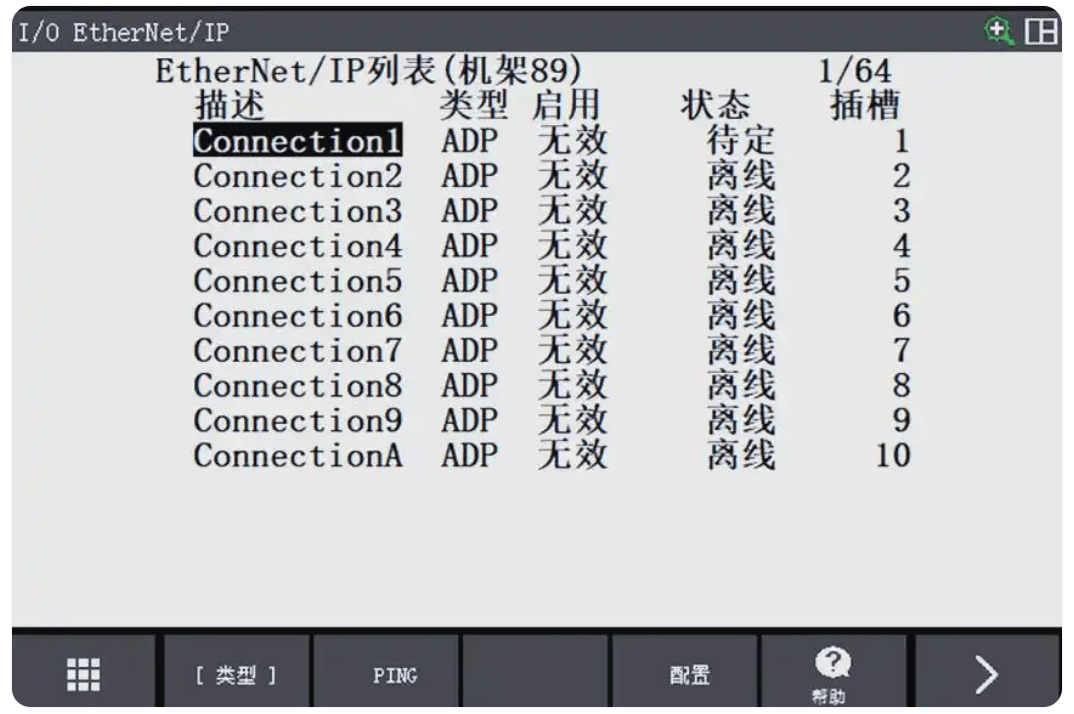
按下PREV键返回,观察到Connection1的状态显示为“待定”。重启机器人后,当通讯成功时,状态将自动变为“运行”。
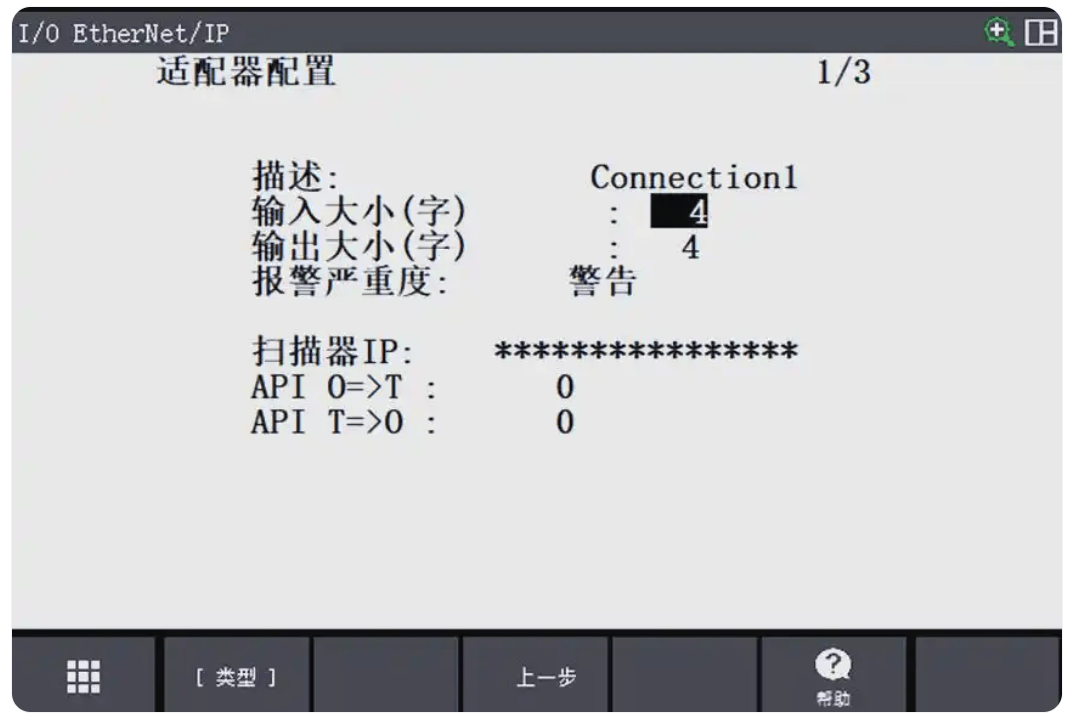
► 设定适配器参数
在菜单中选择“Connection1”,然后按下F4键进行配置。这将带你进入适配器配置画面,其中需要设置的参数包括输入大小(字)和输出大小(字)。每个字(Word)占据16位,如上图所示,我们配置了64位输入和64位输出,这表示Ethernet ip与外部设备进行通讯时,双方都需要具备相应的IO数量。同样地,外部设备也必须配置为64位输出和64位输入,以确保通讯的顺畅进行。
确认通讯成功
在机器人与外部设备成功通讯后,我们可以对Ethernet IP的IO进行分配修改。
机架配置与IO分配修改
首先,我们需要确认机架的配置信息,因为这将直接影响到Ethernet IP的IO分配和修改。在机器人与外部设备成功建立通讯后,这一步骤显得尤为重要。接着,我们可以根据实际需求,对Ethernet IP的IO进行灵活的分配和修改,以满足系统的运行要求。
在进行Ethernet IP的IO分配和修改时,需要根据实际需求和系统配置,合理设定IO的范围。这个范围通常由用户根据实际情况进行定义,以确保系统的正常运行和数据的准确传输。
在进行Ethernet IP的IO分配和修改时,当机器人作为从站角色参与系统配置时,需要为主站提供其EDS文件。这个EDS文件包含了机器人的详细配置信息,对于确保主站能够正确组态和与从站机器人进行数据交换至关重要。用户可以通过机器人的菜单系统中的“文件”选项来备份EDS文件,或者在通讯配置中直接获取。这样,主站就可以根据这些信息,进行相应的IO分配和修改,以实现系统的顺畅运行和数据传输的准确性。
确认设置完机器人一侧的EthernetIP参数时开始配置网关参数。
网关配置:
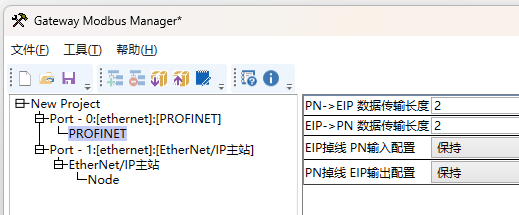
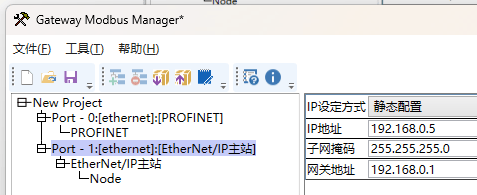
通过网关配置软件,进入管理界面,新建项目选择PN2EIPm
配置Profinet参数:
设置网关的Profinet参数(数据长度以及掉线后数据处理方式),设备名称与IP地址由主站软件分配。
配置Ethernet/IP参数:
设置网关的Ethernet/IP IP地址,确保与机器人在同一子网。
配置Ethernet/IP的连接参数,定义与机器人交换的数据长度和格式。改成和前面机器人配置的同一网段。
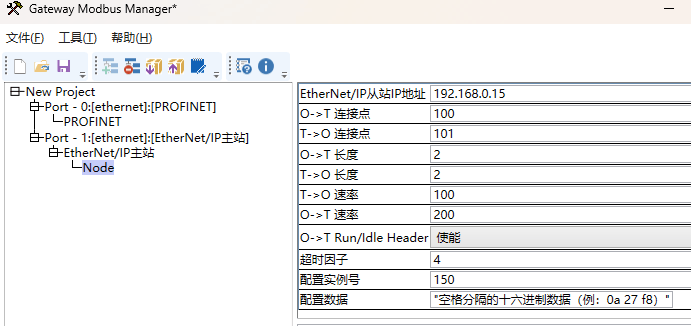
填写机器人IP192.168.1.100,并填写机器人的连接点,速率以及数据长度等参数。可从机器人生成的EDS文件中查找具体参数。完成配置后将配置下载进网关。
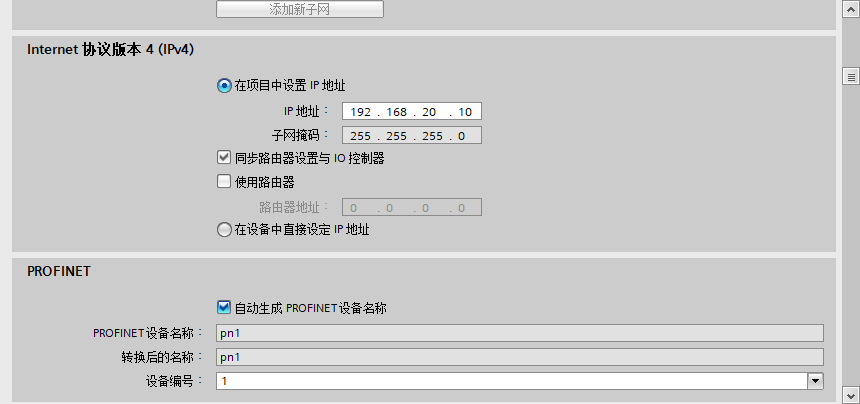
PLC配置
添加网关为Profinet设备:在PLC编程软件(如TIA Portal)中,添加网关为Profinet设备,并分配相应的设备名称及IP地址。
配置数据交换:根据网关的Profinet配置,设置PLC的数据区,确保与网关的数据区匹配。
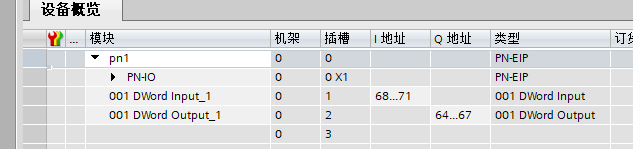
到此网关配置完成。
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31659浏览量
224574 -
网关
+关注
关注
9文章
7070浏览量
56696 -
Profinet
+关注
关注
9文章
2409浏览量
28416 -
Ethernet
+关注
关注
3文章
715浏览量
58326
发布评论请先 登录

开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
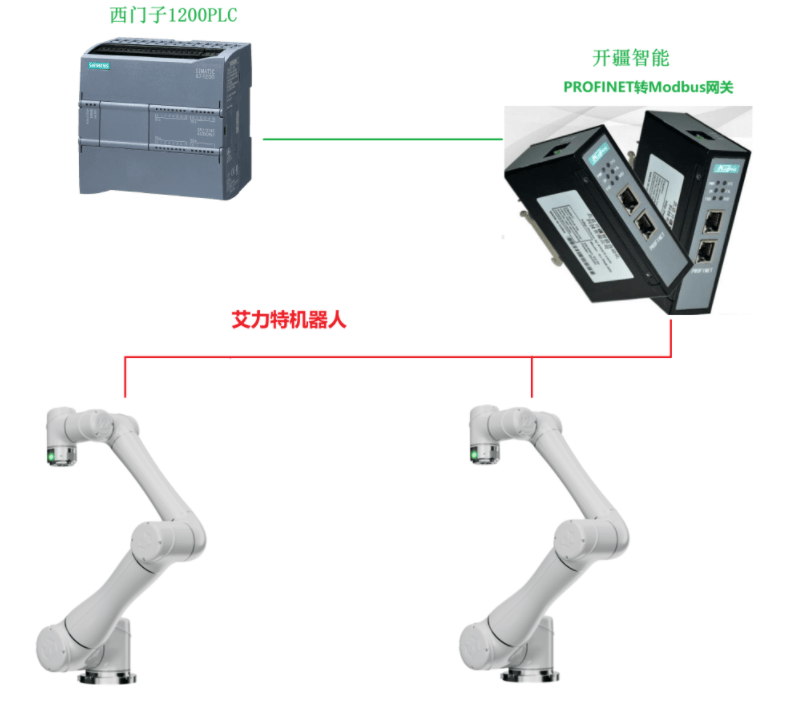
开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例
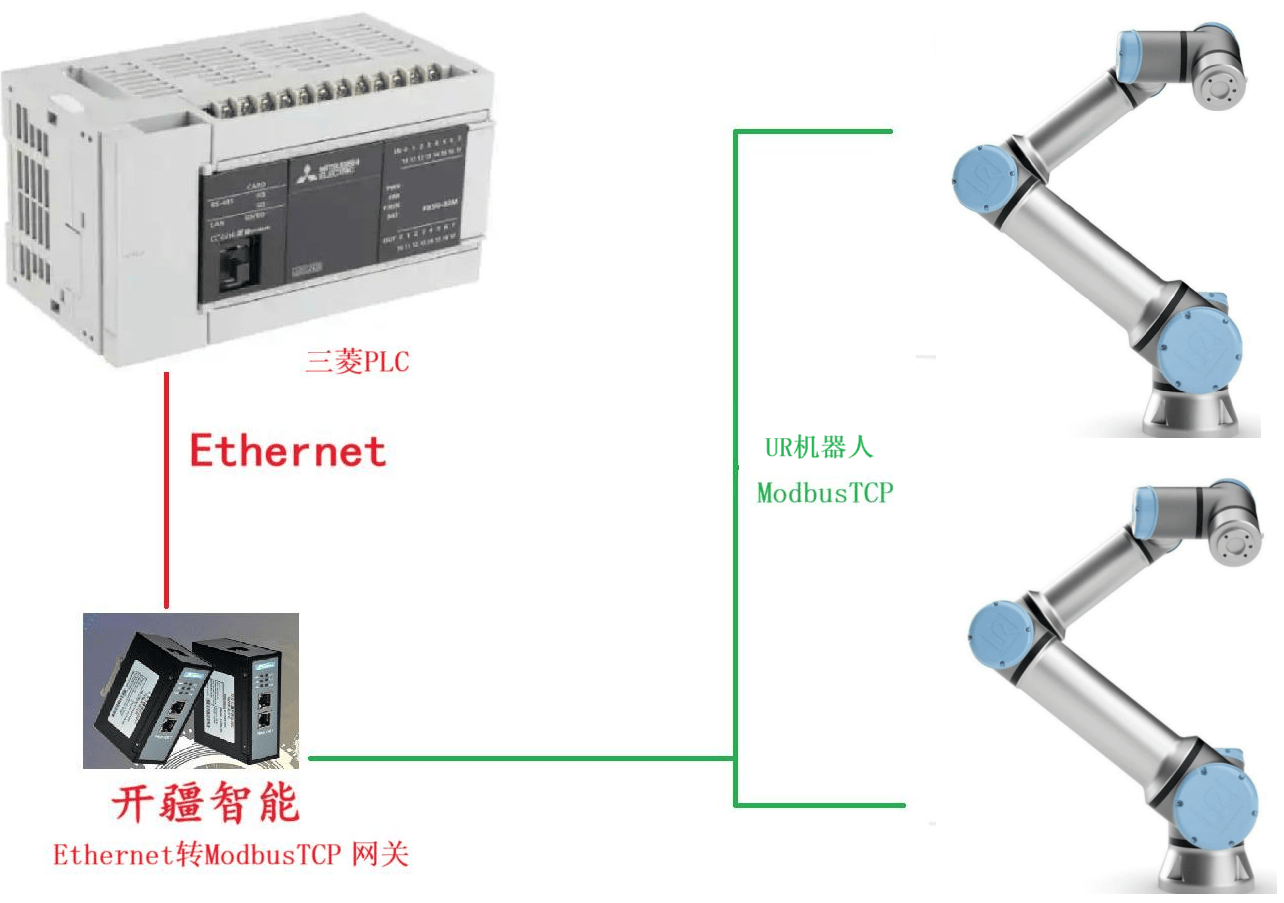
开疆智能Ethernet转ModbusTCP网关连接UR机器人配置案例
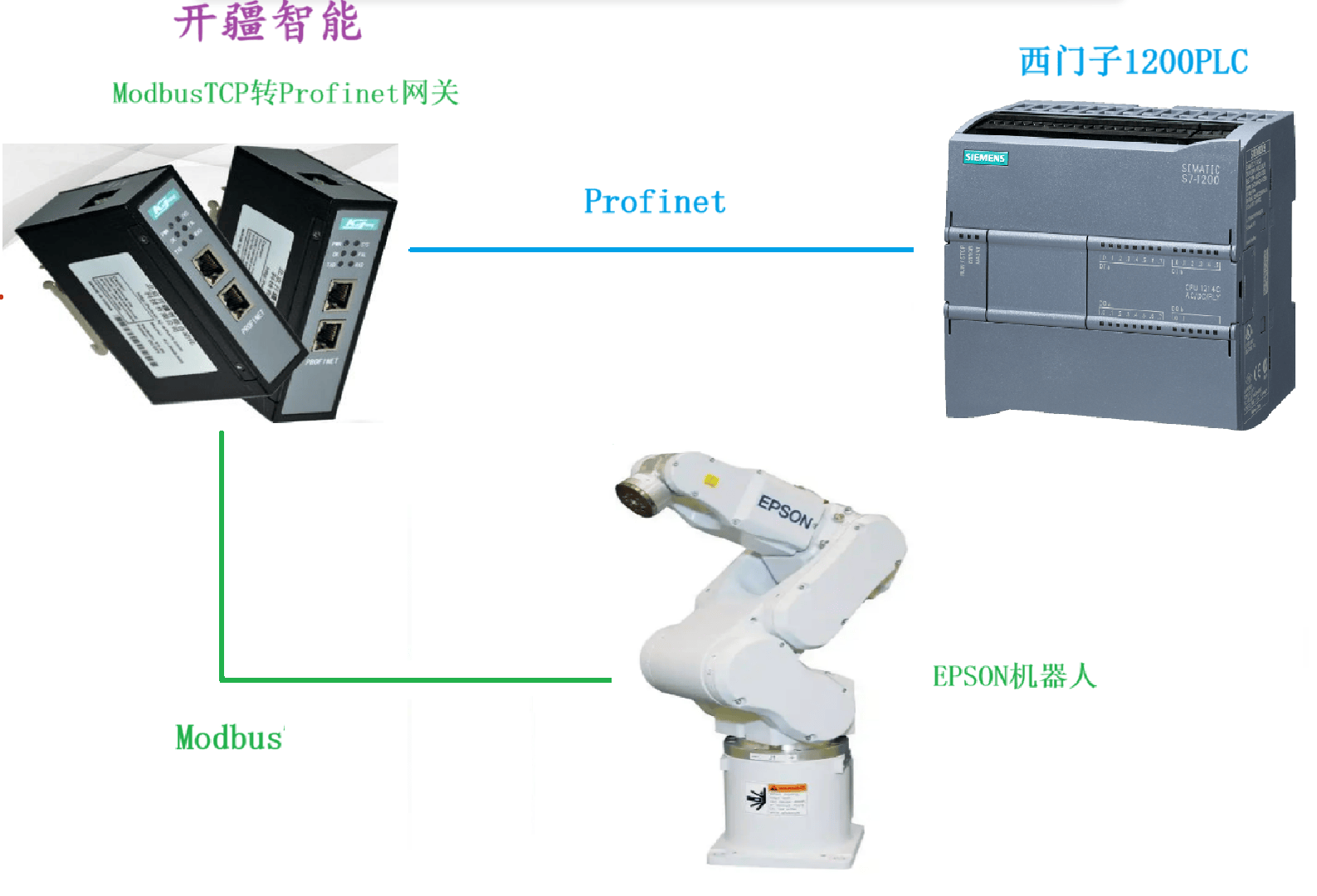
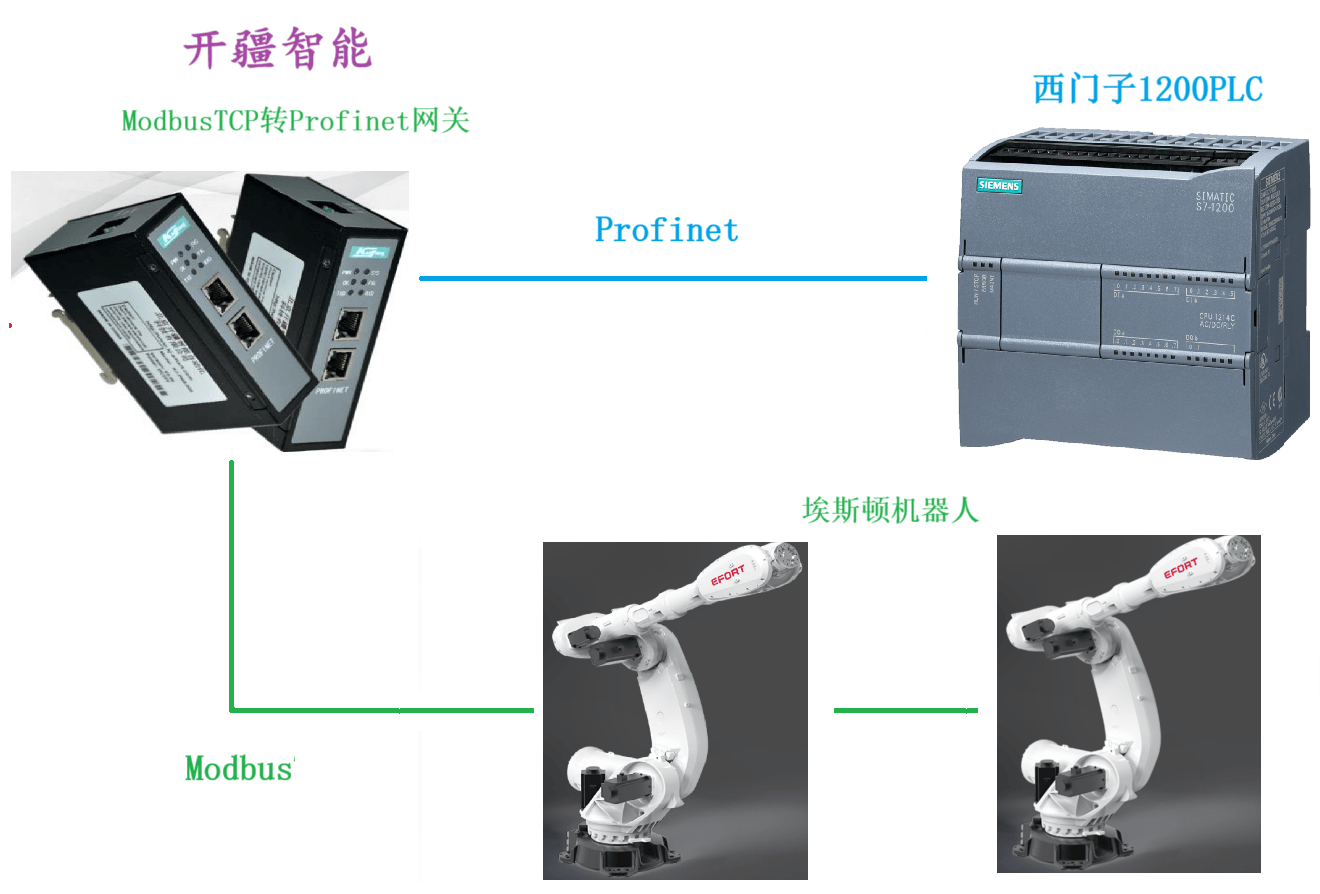
开疆智能ModbusTCP转Profinet网关连接EPSON机器人配置案例
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
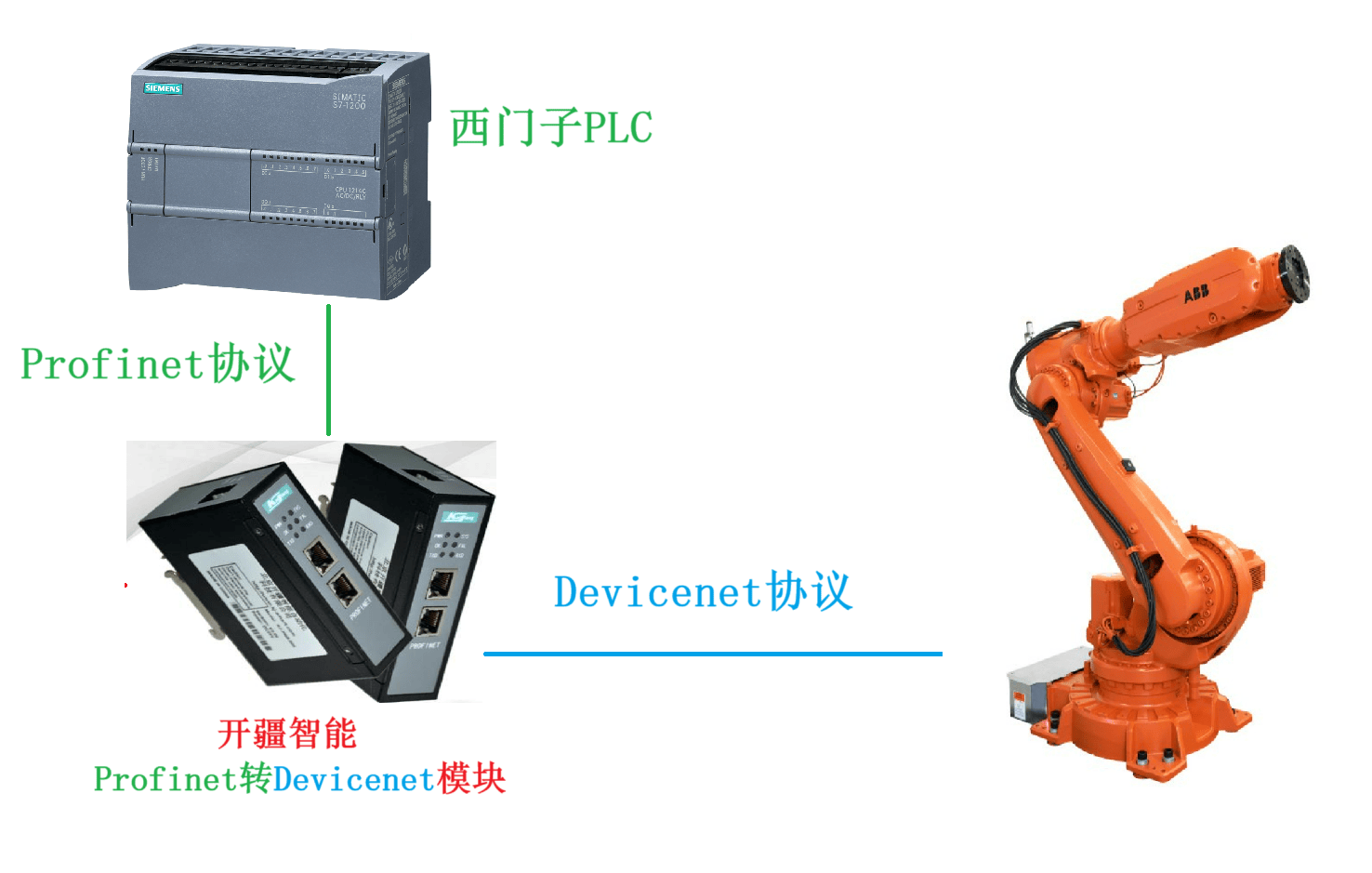
开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
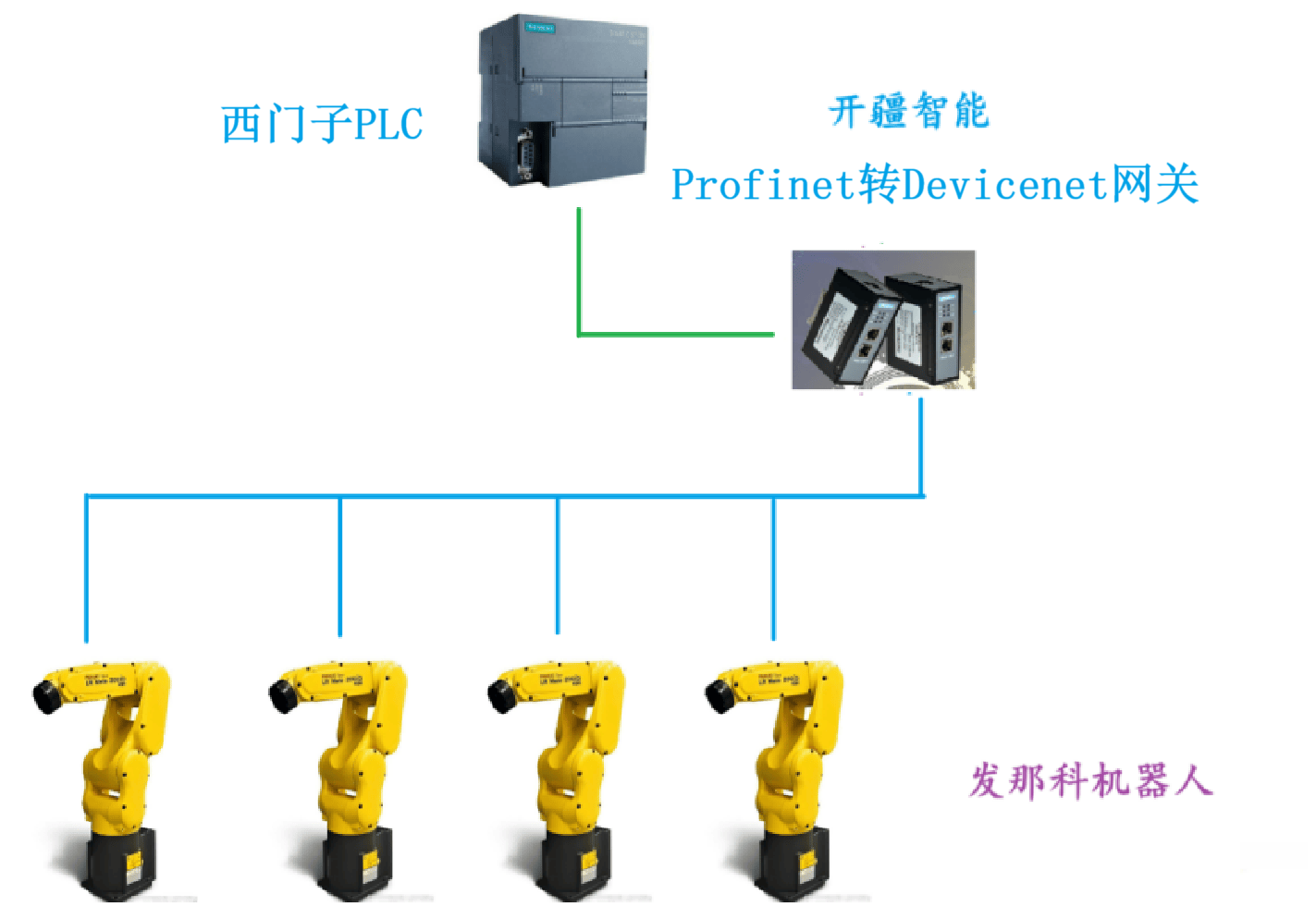
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例
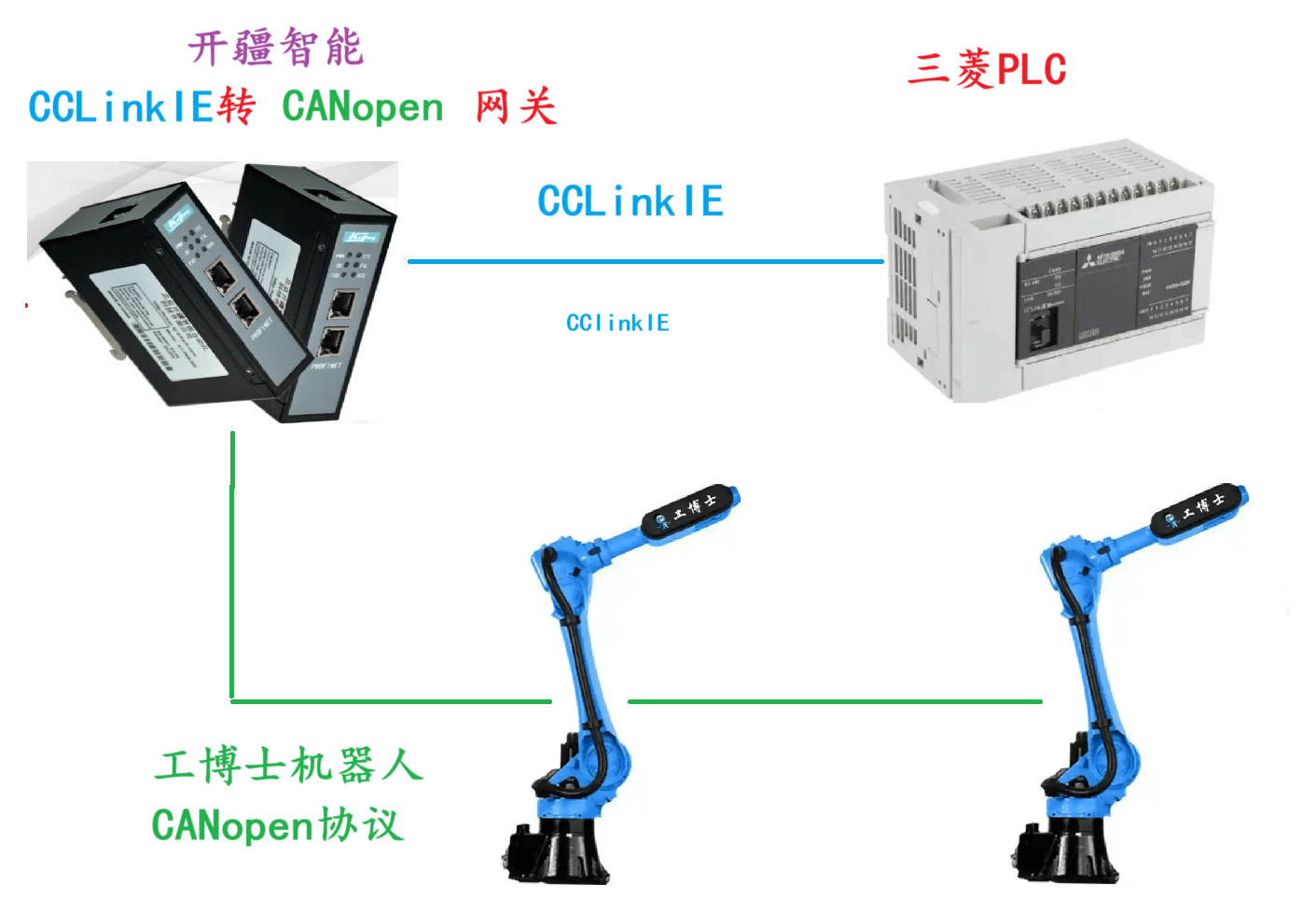
开疆智能CCLinkIE转CANopen网关连接GBS20机器人配置案例
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例

开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例

开疆智能Ethernet/IP转Modbus网关连接变频器配置案例
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信




评论