 BEVFusion —面向自动驾驶的多任务多传感器高效融合框架技术详解
BEVFusion —面向自动驾驶的多任务多传感器高效融合框架技术详解

BEVFusion 技术详解总结
原始论文:*附件:bevfusion.pdf
介绍(Introduction)
背景:自动驾驶系统配备了多种传感器,提供互补的信号。但是不同传感器的数据表现形式不同。
自动驾驶系统配备了多样的传感器。 例如,Waymo的自动驾驶车辆有29个摄像头、6个雷达和5个激光雷达。 **不同的传感器提供互补的信号:**例如,摄像机捕捉丰富的语义信息,激光雷达提供精确的空间信息,而雷达提供即时的速度估计。 因此,多传感器融合对于准确可靠的感知具有重要意义。**来自不同传感器的数据以根本不同的方式表示:**例如,摄像机在透视图中捕获数据,激光雷达在3D视图中捕获数据。
1. 核心目标与创新
- 目标 解决多模态传感器(摄像头、激光雷达等)在3D感知任务中的异构数据融合难题,实现高效、通用的多任务学习(如3D检测、BEV分割)
- 核心创新
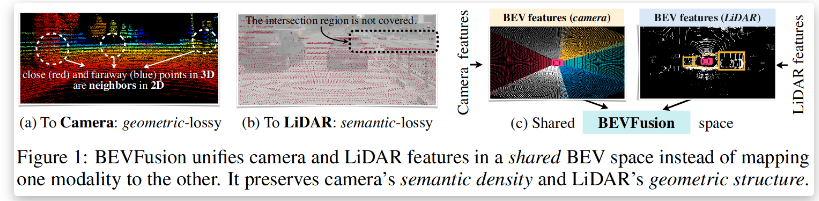
- 统一BEV表示 将多模态特征映射到共享的鸟瞰图(BEV)空间,保留几何结构(激光雷达优势)和语义密度(摄像头优势)
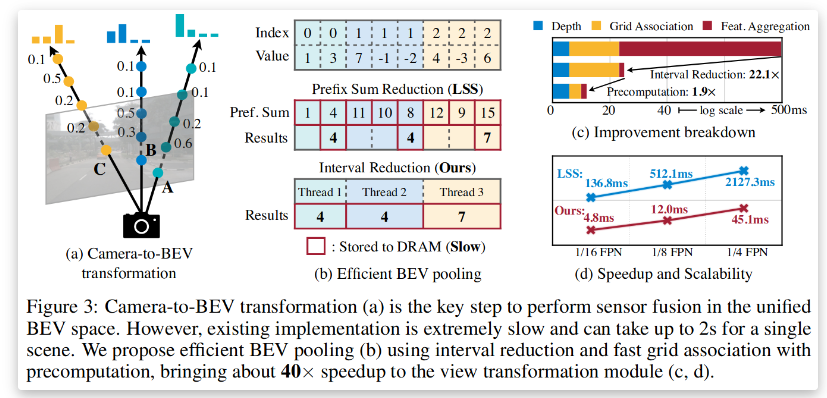
- 优化BEV池化 通过预计算和间隔缩减技术,将BEV池化速度提升40%以上
- 全卷积融合 解决激光雷达与摄像头BEV特征的空间错位问题,提升融合鲁棒性
2. 技术框架与关键模块
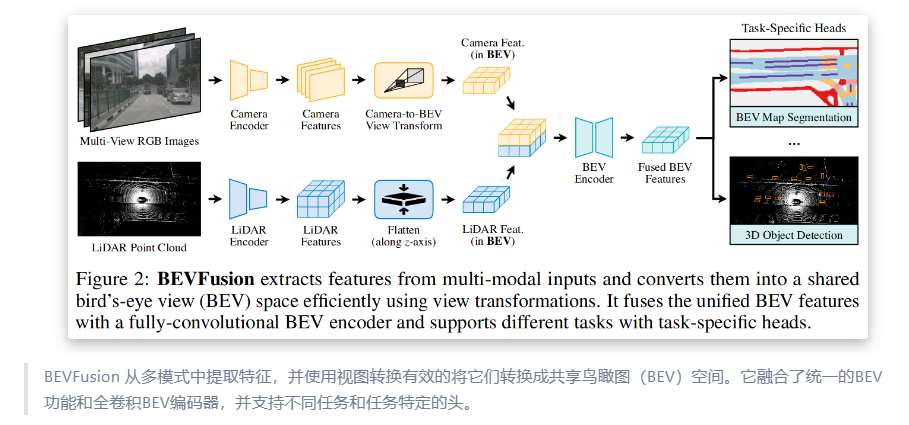
2.1 多模态特征提取
- 传感器输入
- 摄像头 多视角图像(透视视图)
- 激光雷达 点云数据(3D视图)
- 模态专用编码器
- 摄像头 2D卷积神经网络(如ResNet)提取图像特征
- 激光雷达 3D稀疏卷积网络(如VoxelNet)提取点云特征
2.2 统一BEV表示构建
- 摄像头到BEV的转换
- 深度分布预测 显式预测每个像素的离散深度分布(避免几何失真)
- 特征投影 沿相机射线将像素特征分散到离散3D点,通过BEV池化聚合特征(见图1)
- 优化加速 预计算相机内外参矩阵,减少实时计算开销
- 激光雷达到BEV的转换 直接通过体素化将点云映射到BEV网格
2.3 全卷积特征融合
- 融合策略
- 通道级联 将摄像头和激光雷达的BEV特征拼接,输入全卷积网络(FCN)
- 空间对齐补偿 通过可变形卷积或注意力机制缓解特征错位问题
2.4 多任务头设计
- 3D物体检测 基于融合后的BEV特征,采用Anchor-free或CenterPoint范式预测边界框
- BEV地图分割 全卷积解码器输出语义分割结果(如车道线、可行驶区域)
3. 性能优势与实验验证
3.1 基准测试结果(NuScenes数据集)
| 任务 | 模型类型 | 性能指标 | BEVFusion优势 |
|---|---|---|---|
| 3D物体检测 | 纯摄像头模型 | mAP: 35.1% | mAP: 68.5%(+33.4%) |
| 3D物体检测 | 纯激光雷达模型 | mAP: 65.2% | mAP: 68.5%(+3.3%) |
| BEV地图分割 | 纯摄像头模型 | mIoU: 44.7% | mIoU: 50.7%(+6.0%) |
| BEV地图分割 | 纯激光雷达模型 | mIoU: 37.1% | mIoU: 50.7%(+13.6%) |
3.2 效率对比
- 计算成本 BEVFusion的计算量仅为同类多模态模型的50%(1.9倍低于纯激光雷达模型)
- 推理速度 优化后的BEV池化使端到端延迟降低40%
4. 与传统方法的对比分析
4.1 早期融合 vs. 晚期融合
| 方法 | 优势 | 劣势 |
|---|---|---|
| 早期融合(特征级) | 保留原始数据信息 | 异构特征难以对齐(如几何失真) |
| 晚期融合(决策级) | 模态独立性高 | 语义信息丢失,任务性能受限 |
| BEVFusion | 统一BEV空间平衡几何与语义 | 需优化特征对齐与计算效率 |
4.2 其他多模态模型对比
- PointPainting 将摄像头语义注入点云,但依赖激光雷达主导,无法充分发挥摄像头优势
- TransFusion 基于Transformer的融合,计算复杂度高,实时性差
5. 局限性与未来方向
- 局限性
- 动态场景适应性 BEV静态假设可能影响运动物体感知
- 传感器依赖性 仍需激光雷达提供几何先验
- 未来方向
- 纯视觉BEV泛化 探索无激光雷达的BEV感知(如4D标注数据增强)
- 时序融合 引入多帧BEV特征提升动态场景理解
总结
BEVFusion通过统一的BEV表示空间和高效融合机制,解决了多模态传感器在几何与语义任务中的权衡问题,成为自动驾驶多任务感知的标杆框架其设计范式为后续研究提供了重要启发 **“统一表示+轻量优化”是多模态融合的核心方向**
项目链接
- 官方网页:https://hanlab.mit.edu/projects/bevfusion
- 原始论文:https://arxiv.org/abs/2205.13542
- 项目地址:https://github.com/mit-han-lab/bevfusion
参考资料
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动驾驶
+关注
关注
795文章
15065浏览量
182035
发布评论请先 登录
相关推荐
热点推荐
格罗方德传感器融合方案助力实现更安全的自动驾驶
雷达是高级驾驶辅助系统(ADAS)的核心技术基石,与摄像头、激光雷达等传感器协同组成感知网络,支撑车辆环境感知、驾驶决策,助力当下安全驾驶及

自动驾驶传感器前融合与后融合技术上有何区别?
[首发于智驾最前沿微信公众号]在自动驾驶技术飞速发展的今天,如何让车辆像人类一样感知周围环境,一直是非常重要的话题。无论是摄像头、激光雷达还是毫米波雷达,都存在各自的物理局限性,因此多传感器

自动驾驶多传感器前融合,到底提前融合了什么?
[首发于智驾最前沿微信公众号]自动驾驶里的多传感器融合,本质是把不同来源的信息拼在一起,让系统对环境的理解更完整。摄像头提供颜色和语义,激光雷达提供三维结构,毫米波雷达提供距离和速度,

智驾之“眼”的血管革命:自动驾驶传感器融合趋势下,多频段射频连接器集成方案深度全景解析
在自动驾驶向L3/L4级进阶的浪潮下,传感器融合已成为整车架构的核心。本文深度剖析了车载射频连接器从单体向“高频、高速、多径集成”演进的必然

如何设计自动驾驶传感器失效检测与容错策略?
对于自动驾驶汽车而言,传感器是它感知世界的窗口。摄像头负责采集环境图像,毫米波雷达和激光雷达则用于测量周围物体的位置和速度,而GNSS(全球导航卫星系统)与惯性测量系统可提供车辆的定位信息。这些数据经过融合处理之后,
自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案
一、自动驾驶传感器融合中的时间同步重要性 在自动驾驶感知体系中,BEV(Bird's-Eye-View,鸟瞰图)感知技术凭借尺度变化小、视角

激光雷达传感器在自动驾驶中的作用
2024 年至 2030 年间,高度自动化汽车每年的出货量将以 41% 的复合年增长率增长。这种快速增长导致汽车品牌对精确可靠传感器技术的需求空前高涨,因为他们希望提供精准、可靠且最终完全自动
自动驾驶仿真测试有什么具体要求?
、动力响应和操控稳定性,自动驾驶系统的复杂性主要体现在感知、决策与控制等软件层面,其运行行为高度依赖于交通环境、传感器输入和系统逻辑。这也就意味着,传统的物理测试方法已经难以全面覆盖自动驾驶系统所面临的所有

边聊安全 | 以L3级自动驾驶为例,详解DDT、DDT Fallback、MRC、MRM概念
以L3级自动驾驶为例,详解DDT、DDTFallback、MRC、MRM概念写在前面:在自动驾驶技术迅猛发展的今天,动态驾驶

太阳光模拟器 | 在汽车自动驾驶开发中的应用
在汽车产业向电动化、智能化转型的浪潮中,自动驾驶技术的研发面临着复杂环境感知的挑战。光照条件作为影响传感器性能的关键因素,直接关系到自动驾驶系统的安全性和可靠性。紫创测控Luminbo

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证
自动驾驶仿真测试中,游戏引擎的底层架构可能会带来非确定性的问题,侵蚀测试可信度。如何通过专业仿真平台,在多传感器配置与极端天气场景中实现测试数据零差异?确定性验证方案已成为自动驾驶研发

自动驾驶汽车是如何准确定位的?
厘米级的定位精度,并能够实时响应环境变化。为此,自动驾驶系统通常采用多传感器融合的方式,将全球导航卫星系统(GNSS)、惯性测量单元(IMU)、激光雷达(LiDAR)、摄像头、超宽带(

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?
[首发于智驾最前沿微信公众号]自动驾驶技术的发展,让组合辅助驾驶得到大量应用,但现在对于自动驾驶技术的宣传,普遍是在乘用车领域,而对于卡车、

自动驾驶技术落地前为什么要先测试?
大量的传感器、复杂的算法和强大的计算平台来取代人类驾驶员的感知、判断和操作。在技术落地之前,“测试”便成了自动驾驶从实验室走向真实道路的“安全阀”和“试金石”。如果没有充分的测试,无论



评论