 自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案
自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案

一、自动驾驶传感器融合中的时间同步重要性
在自动驾驶感知体系中,BEV(Bird's-Eye-View,鸟瞰图)感知技术凭借尺度变化小、视角遮挡少的优势,成为环境感知的核心技术方向。BEV感知算法需整合多相机图像等多源数据,完成分类、检测、分割、跟踪等关键任务,而传感器融合的准确性直接依赖于时间同步——若不同相机数据存在时间偏差,会导致多视角图像信息错位,使BEV算法无法精准构建环境俯视图,出现目标定位错误、轨迹跟踪失效等问题,严重影响自动驾驶决策的安全性与可靠性。
以自动驾驶实际场景为例,当车辆需识别前方行人时,若前向相机与侧视相机数据时间差超过微秒级,可能导致算法误判行人位置与移动轨迹,引发制动不及时等风险。因此,时间同步是确保BEV感知算法有效运行、实现多传感器协同工作的必要前提,更是保障自动驾驶系统“感知-决策-执行”全流程稳定的核心基础。
二、自动驾驶数据采集的时间同步挑战
搭建BEV Camera数据采集系统时,时间同步环节常面临以下技术难题,直接影响数据质量与算法训练效果:
- 多设备时钟差异 :系统集成6个iDS相机及多个采集模块,不同设备内部时钟存在固有偏差,且受硬件性能、环境温度影响,易出现时钟漂移,难以形成统一时间基准。
- 高精度需求与技术瓶颈 :BEV感知算法训练需纳秒级时间同步精度,传统软件同步方式受网络延迟、软件调度波动影响,无法突破精度限制,难以满足算法对数据时间一致性的要求。
- 复杂场景干扰 :实际采集环境中,GPS信号可能因隧道、高楼遮挡出现临时缺失,导致外部时间基准中断;同时网络传输延迟不稳定,进一步加剧时间偏差,影响同步稳定性。
- 系统协同与配置复杂度 :需同时实现多相机参数统一管理(如曝光时间、帧率、分辨率)与时间同步配置,传统方案需分开调试,操作繁琐且易出现参数与同步不匹配的问题。
三、自动驾驶数据采集的时间同步精度要求
自动驾驶场景的安全性与BEV算法训练的准确性,对时间同步精度提出明确且严苛的标准:
- 基础数据采集场景(如单一视角图像采集):微秒级精度可满足初步数据记录需求,但无法支撑多传感器融合与BEV算法训练;
- BEV感知算法研发与传感器融合场景:需达到 纳秒级时间同步精度 ,确保6个iDS相机采集的图像数据在时间维度完全对齐,避免因时间偏差导致的多视角信息错位,为算法提供高质量训练数据;
- 自动驾驶测试与验证场景:纳秒级同步精度可确保采集数据能精准复现实际路况,为算法迭代、功能验证提供可靠数据支撑,避免因时间偏差导致测试结果失真。
康谋BEV Camera数据采集系统通过XTSS时间同步服务,结合硬件与软件协同优化,可稳定实现纳秒级时间同步,完全匹配自动驾驶核心场景的精度需求。
四、自动驾驶数据采集的时间同步方法
针对自动驾驶数据采集的不同精度需求,康谋BEV Camera数据采集系统提供两种时间同步方法,覆盖全场景应用需求:
(一)软时间同步
基于软件层面的协议与算法实现时间同步,核心依赖(g)PTP协议(IEEE 802.1AS、IEEE 1588),通过XTSS时间同步软件管理同步逻辑:
- 技术原理:以系统内主时钟为基准,通过以太网向各从设备(如iDS相机)传输时间同步报文,实时校正从设备时钟偏差;
- 精度与场景:同步精度达微秒级,适用于对精度要求较低的基础数据采集场景,如单一相机的图像采集与初步数据记录;
- 系统支持:XTSS软件可通过可视化界面(XTSS Monitor)实时监控同步状态,显示各设备MAC地址、PDelay(传播延迟)等参数,便于运维管理。
(二)硬件时间同步
通过专用硬件模块与软件协同,实现纳秒级高精度同步,是BEV感知算法训练与传感器融合场景的核心方案:
- 核心硬件配置 :以BRICKplus为核心平台,搭配GPS接收模块(提供外部高精度时间基准)、PCIe Slot ETH6000扩展模块(连接多相机),通过硬件时间戳技术直接捕获数据包时间,避免软件延迟影响;
- 同步逻辑 :GPS模块获取卫星时钟信号后,通过XTSS服务向各iDS相机分发时间基准,支持13路(g)PTP以太网接口,确保多相机同时接收同步信号;
- 精度与优势 :同步精度达纳秒级,不受软件调度、网络延迟干扰,且支持GPS信号缺失后的偏差校正(通过速率调整或时间“跳转”实现),保障复杂环境下的同步稳定性;
- 软件协同 :结合ROS+PEAK SDK方案,为每个相机创建独立采集线程,通过全局控制信号统一管理采集启停,确保“同步配置-数据采集-时间标记”全流程协同。
五、如何为自动驾驶数据采集选择合适的时间同步方案
选择自动驾驶数据采集的时间同步方案,需结合场景需求、系统架构、精度要求综合判断,关键决策维度如下:
- 匹配精度需求 :若为BEV感知算法训练、多传感器融合场景,优先选择纳秒级硬件同步方案(如康谋BRICKplus+XTSS组合);若为基础数据采集,可选用微秒级软同步方案,平衡成本与效果。
- 适配系统硬件 :方案需兼容采集平台(如x86架构)、相机类型(如iDS GV-51JXCP-C)及扩展模块,确保硬件间无缝集成——例如康谋方案中,BRICKplus可直接通过PCIe Slot ETH6000连接6个iDS相机,无需额外适配。
- 保障场景适应性 :优先选择支持GPS信号补偿、多接口扩展的方案,应对隧道、高楼等复杂环境(如康谋GPS模块缺失信号时,可通过内部算法校正时间偏差),同时满足多相机扩展需求(如增加相机数量时,可通过以太网接口扩展同步通道)。
- 简化运维管理 :选择具备可视化管理工具的方案,如康谋XTSS Configurator可动态配置同步参数(如协议类型、主从时钟身份),XTSS Monitor可实时显示PDelay Count、时间偏差等数据,降低调试与运维成本。
六、康谋BEV Camera数据采集系统:时间同步难题的完整解决方案
针对自动驾驶数据采集的时间同步挑战,康谋推出以BRICKplus为核心的BEV Camera数据采集系统,通过“硬件集成+软件优化+精准同步”三位一体设计,实现全场景高精度时间同步。
(一)系统核心配置与同步优势

(二)关键场景应用效果
- BEV算法训练 :通过纳秒级同步确保6个iDS相机采集的图像数据时间对齐,生成高质量BEV感知数据集,提升算法对目标的分类、分割精度;
- 复杂环境采集 :在GPS信号遮挡场景(如隧道),系统通过内部偏差校正机制维持同步精度,避免数据错位;
- 高效运维 :通过XTSS Monitor实时查看各相机PDelay(如enp12s0接口PDelay Count达12988、偏差0ns),同步异常时可快速定位问题。
(三)方案核心价值
康谋BEV Camera数据采集系统不仅解决了多相机时间同步难题,还通过“硬件集成化+软件可视化”设计,降低系统搭建复杂度——无需额外适配第三方硬件,即可实现“同步配置-数据采集-存储管理”全流程自动化,为自动驾驶BEV感知算法研发提供稳定、高效的数据支撑,是自动驾驶数据采集时间同步的优选方案。返回搜狐,查看更多
审核编辑 黄宇
-
数据采集
+关注
关注
40文章
7834浏览量
119915 -
时间同步
+关注
关注
1文章
215浏览量
10557 -
自动驾驶
+关注
关注
791文章
14681浏览量
176754
发布评论请先 登录
自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

深度解析:康谋双模态仿真测试解决方案!
自动驾驶数据采集时间同步指南:方法、挑战、场景与康谋解决方案
自动驾驶数据采集核心指南:ADAS 设备应用、L4 系统选型与优质方案推荐

L4级自动驾驶数据采集系统首选——康谋科技DATALynx ATX4 & BRICK系列全解析
赋能 BEV 感知课题!高校科研多传感器时间同步方案

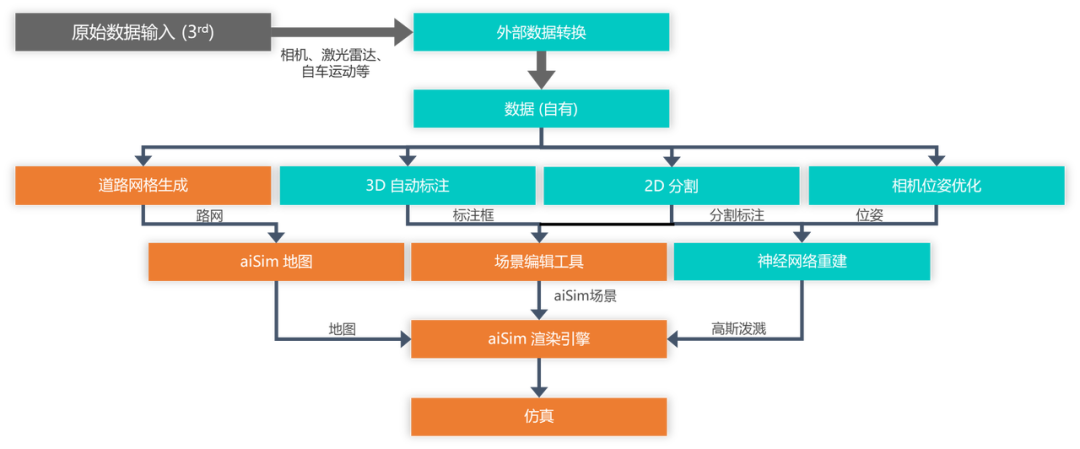
康谋新闻 | 实力认证!康谋aiSim荣获ASAM“自动驾驶仿真技术奖”
康谋新闻 | 康谋加入ASAM组织,全球首个ASIL-D认证自动驾驶仿真平台aiSim引领安全新标杆

恶劣工况下的ADAS多源传感器数据采集:从硬件抗干扰到算法泛化

浅析4D-bev标注技术在自动驾驶领域的重要性
康谋分享 | 自动驾驶仿真进入“标准时代”:aiSim全面对接ASAM OpenX

康谋应用 | 基于多传感器融合的海洋数据采集系统

康谋分享 | 3DGS:革新自动驾驶仿真场景重建的关键技术

康谋方案 | BEV感知技术:多相机数据采集与高精度时间同步方案





 工商网监
工商网监
评论