 小安派BW21-CBV-Kit入门教程之超声波测距
小安派BW21-CBV-Kit入门教程之超声波测距

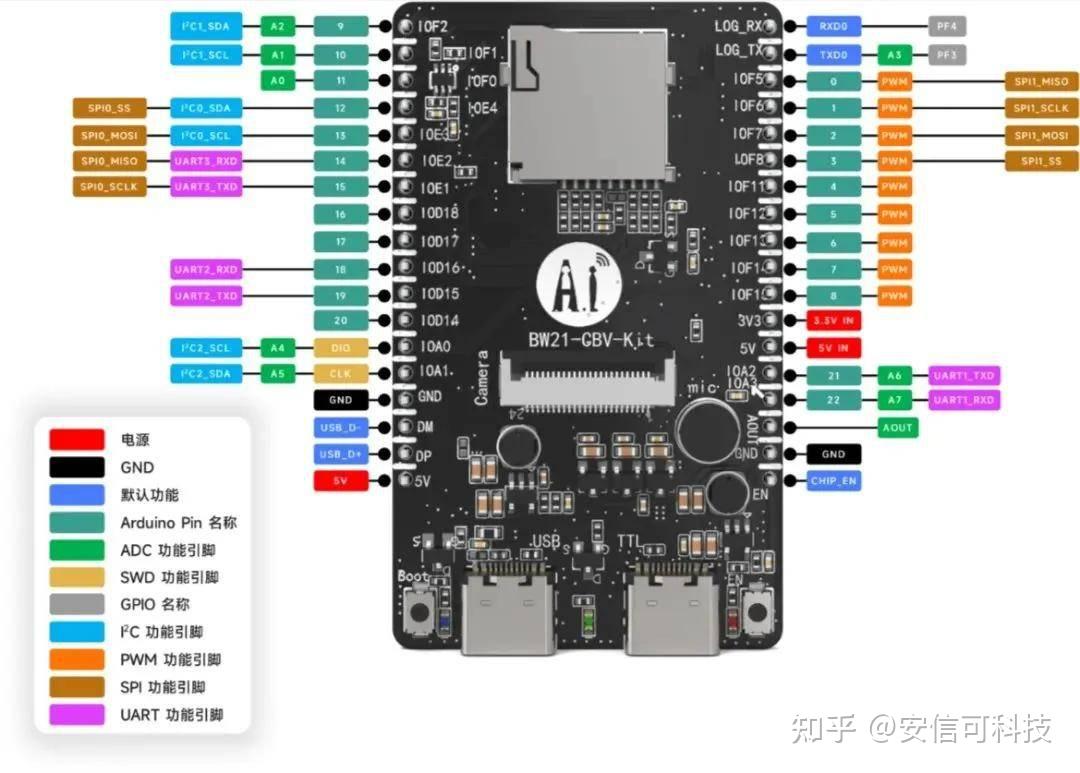
作为一款本地AI图象识别开发板,BW21-CBV-Kit它能够独自运行目标识别模型。2.4GHz+5GHz的双频Wi-Fi,提供高性能的无线传输能力,让图象传输更加流畅。丰富的接口,搭配着AI识别,可以扩展出无限可能。
BW21-CBV-Kit支持Arduino的开发方式,可以简单实现一些DIY想法,例如:人脸识别、手势识别、物品识别等。
这次小安给大家带来的是快速入门教程之超声波测距:
用料
BW21-CBV-Kitx 1
HC-SR04 超声波传感器 x 1
降压电阻或者稳压器
示例
HC-SR04 是一种利用超声波测量距离的模块。它的外形酷似一双眼睛,因此经常被安装在机器人车辆或机械虫子上,成为它们的眼睛。它的工作原理是,首先将 TRIG 引脚 "拨高"(即先拉高再拉低)。HC-SR04 会发送 8 个 40kHz 的声波信号,并将 ECHO 引脚拉高。当声波返回时,将 ECHO 引脚拉低。
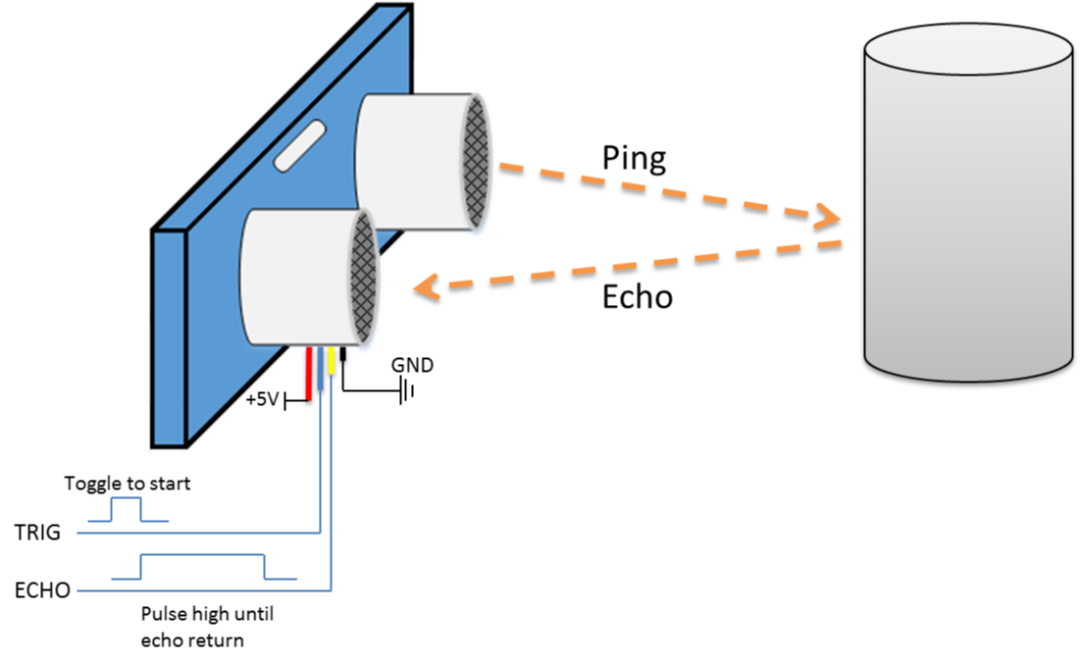
假设声速为 340 米/秒,则声音在空气中前进 1 厘米所需的时间为 340*100*10^-6 = 29 秒。
声波传播的距离是 HC-SR04 和物体之间距离的两倍,因此距离可以用 (time/29) / 2 = time / 58 计算。
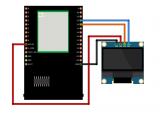
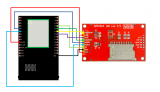
HC-SR04 的工作电压为 5V。当我们将 ECHO 引脚拉高到 5V 时,该电压可能会损坏 BW21-CBV-Kit 的 GPIO 引脚。为避免出现这种情况,我们需要按如下步骤降低电压:
BW21-CBV-Kit 接线图:
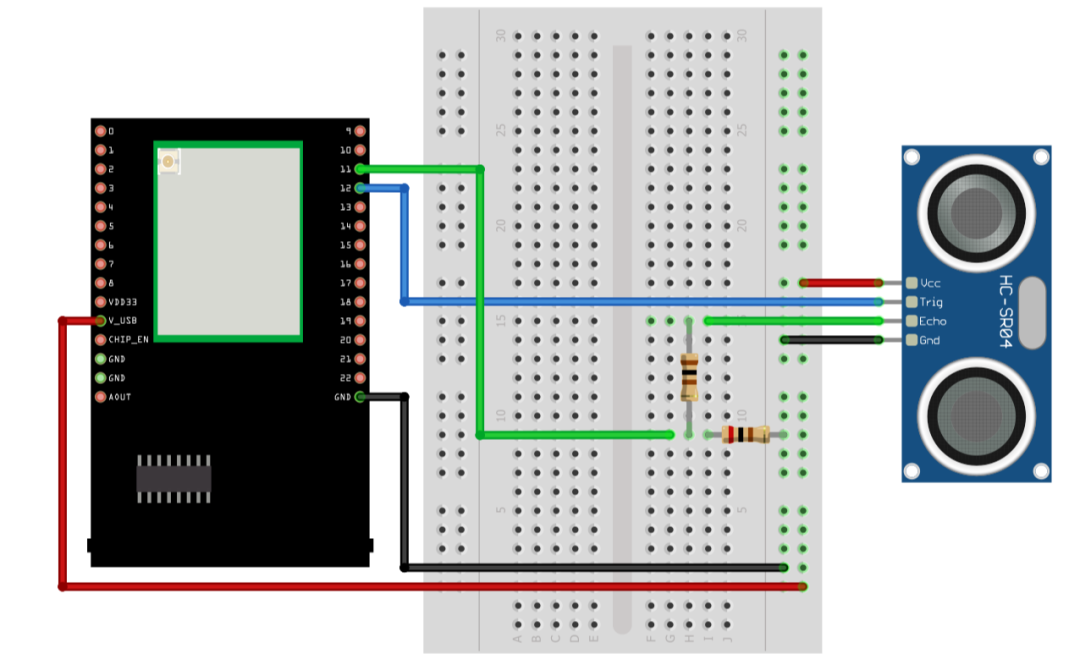
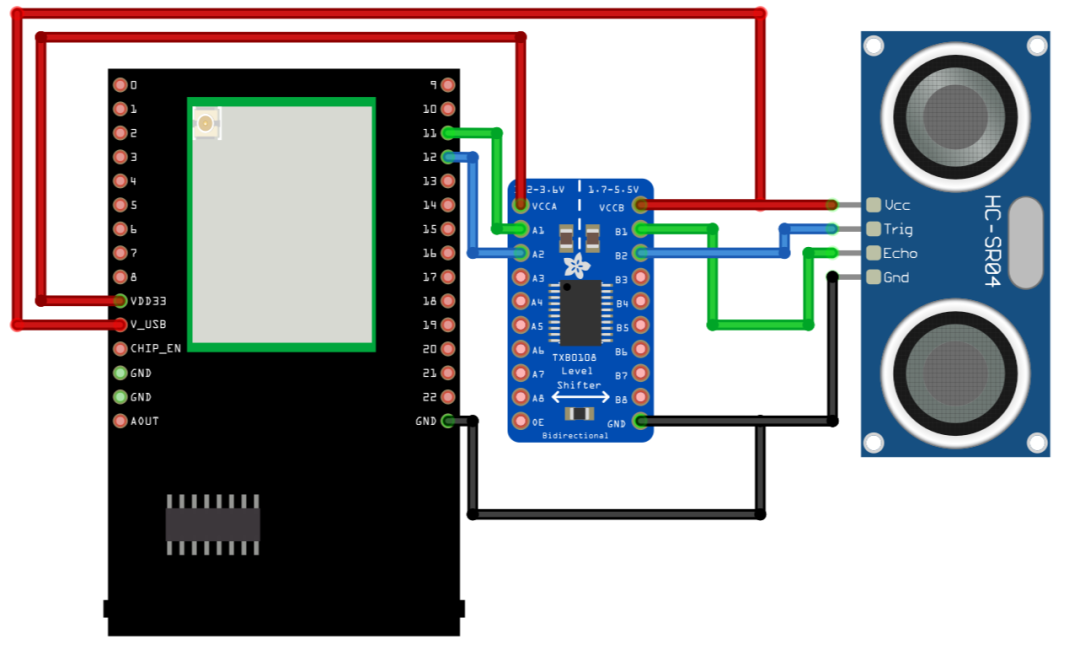
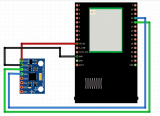
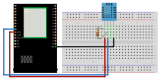
选择阻值为 1:2 的电阻器,任何阻值都可以,但不建议使用过高的阻值。如果手头没有电阻器,可以使用电平转换器代替:
BW21-CBV-Kit 接线图 + 电阻器:
然后,在 **"文件"->"示例"->"AmebaGPIO"->"HCSR04_Ultrasonic "**中打开示例代码。
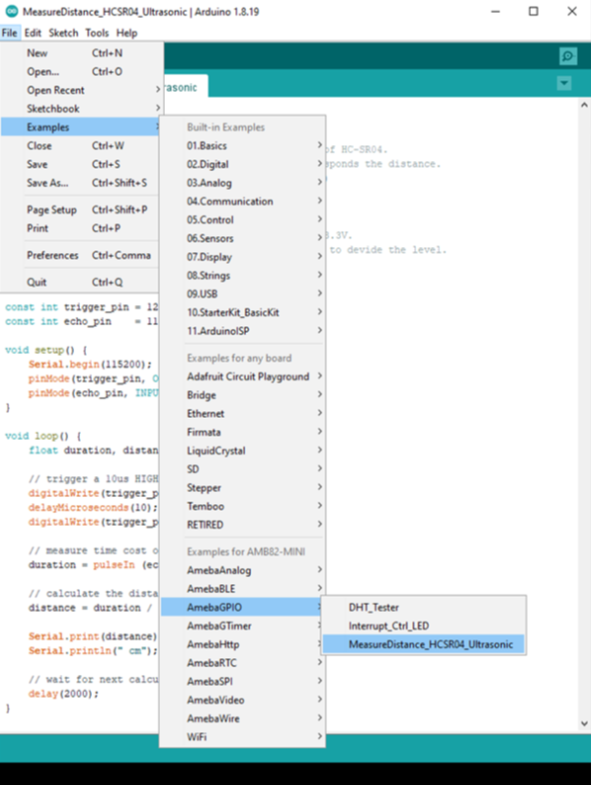
编译并上传到 BW21-CBV-Kit,然后按下重置按钮。打开串行监视器,计算结果每 2 秒钟输出到串行监视器。
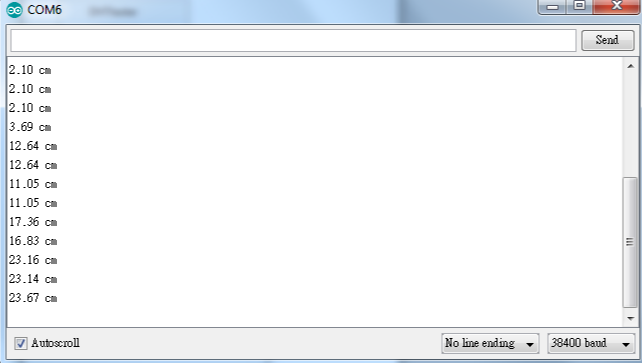
请注意,HCSR04 模块使用声波的反射来计算距离,因此计算结果可能会受到物体表面材料的影响(例如,粗糙的表面容易导致声波散射,而柔软的表面则可能导致声波被吸收)。
代码参考
测量开始前,需要将 TRIG 引脚拉高 10us 然后拉低。这样做的目的是告诉 HC-SR04 即将开始测量:
digitalWrite(trigger_pin, HIGH); delayMicroseconds(10); digitalWrite(trigger_pin, LOW);
接下来,使用 pulseIn 测量 ECHO 引脚拉高的时间。
duration = pulseIn (echo_pin, HIGH);
最后,使用公式计算距离。
distance = duration / 58;
拿到BW21-CBV-Kit的小伙伴不知道怎么下手?提前看最全教程已经准备好啦,如何使用BW21-CBV-Kit?最新最全教程来了~
-
传感器
+关注
关注
2578文章
55567浏览量
794143 -
超声波
+关注
关注
63文章
3327浏览量
146112 -
开发板
+关注
关注
26文章
6433浏览量
121122
原文标题:【教程】小安派BW21-CBV-Kit——超声波测距
文章出处:【微信号:安信可科技,微信公众号:安信可科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
小安派BW21-CBV-Kit开发板教程——I2C之主机扫描设备

小安派BW21-CBV-Kit入门教程之主机模式读取Arduino UNO从机

小安派BW21-CBV-Kit入门教程之读取DHT温湿度传感器
用AI人脸识别开发板BW21-CBV-Kit驱动墨水屏

小安派BW21-CBV-Kit入门教程之OLED显示
小安派BW21-CBV-Kit入门教程之主机模式对Arduino UNO发送数据

小安派BW21-CBV-Kit入门教程之MPU6050 IMU零点检测
BW21-CBV-Kit的使用教程
BW21-CBV-Kit快速入门之Arduino环境搭建

小安派BW21-CBV-Kit入门教程:中断控制LED

直接送!50套小安派 BW21-CBV-Kit Ai图像识别开发板!
用安信可AI人脸识别开发板BW21-CBV-Kit驱动墨水屏

小安派BW21-CBV-Kit入门教程之LCD屏显示数据
小安派BW21-CBV-Kit入门教程之驱动ILI9341 TFT显示屏
小安派BW21-CBV-Kit入门教程之BLE传输DHT数据



评论