 共融机器人的三个要点:共存、协作与认知
共融机器人的三个要点:共存、协作与认知

摘 要
《国家科学评论》(National Science Review,NSR)最近发表了由华中科技大学丁汉院士,国防科技大学杨学军院士、西安交通大学郑南宁院士,国家自然科学基金委黎明研究员和赖一楠教授,以及华中科技大学吴豪研究员共同撰写的观点文章“Tri-Co Robot: A Chinese Robotic Research Initiative for Enhanced Robot Interaction Capabilities” (https://doi.org/10.1093/nsr/nwx148)。文章介绍了“共融机器人基础理论与关键技术研究”重大研究计划。该计划旨在引导中国机器人领域学者深化相关领域的基础研究,同时推动中国机器人产业的发展。
自1959年工业机器人诞生以来,机器人在机械制造、国防安全、健康服务、科考与医疗等方面发挥出越来越重要的作用。如今,机器人的应用已经从基本的机械加工和简单协助演变成了通过交互作用完成不同环境下的复杂任务。例如,在与环境交互方面,双足机器人实现了在崎岖地形上的高速协调运动;在与人交互方面,智能假肢能够通过神经接口采集生物信号,模仿人的肢体动作,并向使用人员提供反馈;在机器人与机器人之间的交互方面,群体智能机器人可以通过集群控制算法和分散信息交换实现群体合作。由此可见,机器人实现高级功能很大程度上依赖于它们与环境、人和其他机器人的交互能力。
为了推动机器人与作业环境、人及其它机器人之间的交互能力,在丁汉院士、杨学军院士、郑南宁院士等专家的建议下,国家自然科学基金委员会于2016年启动了“共融机器人基础理论与关键技术研究”重大研究计划。共融机器人(Coexisting-Cooperative-Cognitive Robot, Tri-Co Robot)有三个要点,即共存(Coexisting)、协作(Cooperative)与认知(Cognitive),分别保证了机器人应用的普遍性、机器人交互的协调性和机器人对复杂环境的适应性,从而增强与作业环境、人及其它机器人之间的交互能力。
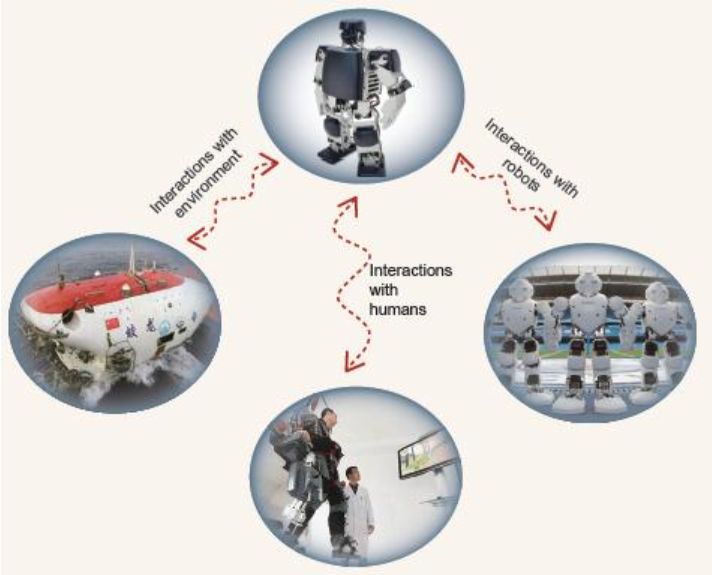
增强与作业环境、人及其它机器人之间交互能力的共融机器人
共融机器人研究关注三个主要科学问题。首先是刚-柔-软体机器人的运动特性与可控性。未来的共融机器人将是由刚性材料与柔性材料再加上运动机构组成的耦合系统,研究其动力学模型和控制方法是增强机器人交互能力的前提。其次是人-机-环境多模态感知与自然交互。研究视-听-触等多模态信息获取方法以及人体生理电信号频谱特征,从而准确理解人体行为意图,进一步实现人-机互动协作。最后是机器人群体智能与操作系统架构。探索自主个体互动及感知决策信息的传播机理,建立群体认知和互动协作的模型及方法,实现集群协作控制。同时,“共融机器人基础理论与关键技术研究”重大研究计划旨在发展机器人在智能制造、康复医疗和国防安全等方面的应用,开发出 “能工巧匠型”智能制造机器人、智能康复机器人和特种集群机器人等具有高级功能形态的机器人系统。
由华中科技大学丁汉院士,国防科技大学杨学军院士、西安交通大学郑南宁院士,国家自然科学基金委黎明研究员和赖一楠教授,以及华中科技大学吴豪研究员共同撰写的观点文章“Tri-Co Robot: A Chinese Robotic Research Initiative for Enhanced Robot Interaction Capabilities”最近发表于《国家科学评论》(National Science Review,2017,https://doi.org/10.1093/nsr/nwx148),介绍了“共融机器人基础理论与关键技术研究”重大研究计划。该计划旨在引导中国机器人领域学者深化相关领域的基础研究,同时推动中国机器人产业的发展。
-
机器人
+关注
关注
213文章
31447浏览量
223669
原文标题:NSR观点 | 共融机器人的基础理论与关键技术
文章出处:【微信号:zhishexueshuquan,微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
未来工业AI发展的三个必然阶段

安霸前端AI SoC助力开发新一代协作机器人

工业机器人的特点
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
华沿机器人:以协作机器人技术赋能汽车智能制造新时代

慧通测控的协作机器人有哪些测试项目?

激光干涉仪:解锁协作机器人DD马达的精度密码

工业机器人与协作机器人概念不同




评论