 工业机器人的未来发展方向:富唯智能以具身智能重构人机协作新范式
工业机器人的未来发展方向:富唯智能以具身智能重构人机协作新范式

在制造业智能化转型的深水区,工业机器人正从“机械执行者”向“自主决策者”进化。传统工业机器人依赖固定编程与刚性路径的局限性日益凸显,而工业机器人的未来发展方向正朝着具身智能、多模态感知、柔性协作三大维度突破。作为这一领域的领跑者,富唯智能以自主研发的具身智能工业机器人技术矩阵,重新定义了智能制造的效率边界与人机协作生态。
一、具身智能:从“离身”到“具身”的认知跃迁
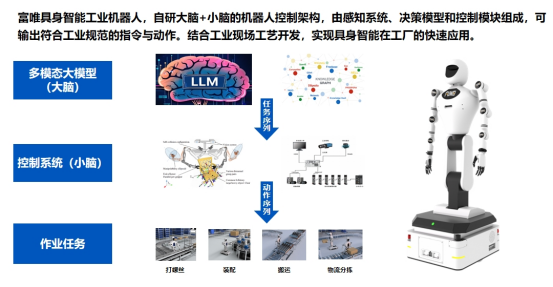
工业机器人的未来发展方向的核心命题,在于打破智能与物理世界的割裂。富唯智能的具身智能工业机器人通过“感知-认知-执行”闭环架构,实现了智能与躯体的深度耦合。其核心技术突破包括:
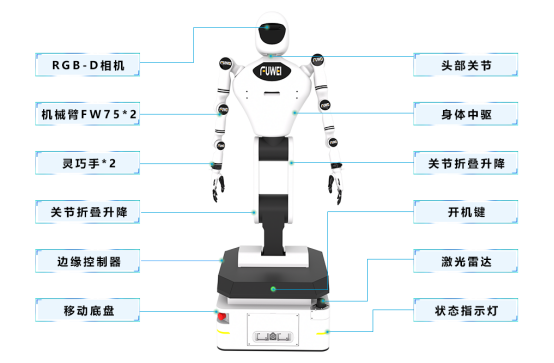
1.多模态感知融合:集成3D视觉、激光雷达、六维力传感器,构建毫米级(±5mm)环境建模能力,即使面对光线多变或遮挡严重的场景,仍能精准识别工件姿态;
2.自主决策能力:搭载AI控制器与深度学习算法,机器人可实时优化路径规划,响应速度较传统方案提升50%。
这种“手、眼、脑”协同的具身智能架构,正是工业机器人的未来发展方向从理论迈向工业落地的关键跃迁。
二、技术优势:富唯智能的三大颠覆性突破
相较于传统AGV或协作机器人,富唯智能具身智能工业机器人的竞争力体现为三大维度:
1.柔性生产适配能力
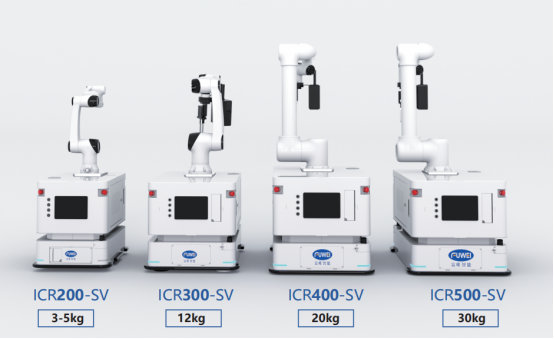
通过模块化设计与低代码编程平台,机器人可快速切换抓取、分拣等任务,兼容多品种、小批量生产需求。
2.人机共融安全生态
双激光雷达导航与3D避障系统实现360°动态感知,在0.1秒内响应人员靠近并主动避让。某电子工厂实测数据显示,人机协同区域事故率归零,生产效率提升40%。
3.跨场景协同效能
依托ForwardControl智能调度平台,机器人集群可共享环境数据并优化产能分配。在物流仓储场景中,50台机器人日均处理18万件包裹,系统崩溃率为零,较传统方案减少运维人力70%。
当全球制造业竞争聚焦于“效率密度”与“人机协同”,工业机器人的未来发展方向已清晰指向具身智能。富唯智能通过“感知-决策-执行”的全链条创新,不仅重新定义了机器人的物理边界,更构建了人机协作的新范式——从替代人力到赋能人力,从单点突破到系统进化。
审核编辑 黄宇
-
人工智能
+关注
关注
1820文章
50325浏览量
266960 -
具身智能
+关注
关注
0文章
472浏览量
909
发布评论请先 登录
锂电企业必看!如何通过知识驱动的具身智能工业机器人实现物流“零事故、零延误”停靠
具身智能工业机器人边缘控制器机床上下料实战
破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南

具身智能交流会
从汽车到具身智能,TSN如何构建机器人的确定性未来?
从“机械臂”到“智能体”:人形机器人在工厂的应用如何开启具身智能革命
遨博机器人以 “更专业更智能” 破局,让机器人从工业走向生活
江苏省具身智能机器人联盟重磅成立,鲸启智能以理事身份赋能产业协同

工业人形机器人电池更换:富唯智能引领柔性制造新变革
GRID大模型:富唯智能人形机器人的“工业大脑”革命


华数机器人入选重庆首批具身智能机器人“揭榜挂帅”项目
深圳哪里有复合机器人卖?富唯智能以全场景方案引领智造未来



评论