 清华大学:软体机器人柔性传感技术最新研究进展
清华大学:软体机器人柔性传感技术最新研究进展

近日,清华大学深圳国际研究生院曲钧天助理教授的海洋软体机器人与智能传感实验室(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)在软体机器人柔性传感领域发表卷首(frontispiece)综述论文。这项工作全面总结了用于柔性传感器的智能材料以及先进制造方法,详尽归纳了不同类型的传感模式。然后,系统梳理了柔性传感技术在软体机器人应用中的最新进展。最后,文章深入探讨了该领域现有挑战和发展前景。本综述旨在为未来软体机器人柔性传感技术的发展和实际应用提供重要指导。
图1 Advanced Functional Materials: Volume 34, Issue 29
软体机器人具有良好的耐用性、灵活性和可变形性等优点,能够适应非结构化环境并执行各种复杂任务,在灾难救援、医疗保健、人机交互等领域展现出巨大的应用潜力。然而,软材料的动力学模型比刚性关节要复杂得多,这给软体机器人的形状和位置控制带来了很大的挑战。感知对于软体机器人来说至关重要。为了更好地模拟生物系统,柔性传感器需要集成到软体机器人系统中,以获得本体感觉和外部感知。尽管已经取得了重大进展,但柔性传感技术仍处于起步阶段。其中一个主要问题是柔性传感器在实际应用中的局限性。在不同温度、湿度和化学环境下,传感器的性能可能会受到影响。因此,开发高稳定性和多模态的柔性传感器是一个主流方向。此外,传感器必须能够随着机器人伸展、弯曲和变形,而不妨碍其自由运动,同时在传感过程中保持柔软特性,这导致传感器获得的信号是非线性的,高维的,并且包含冗余信息。要解决这些问题,需要对传感器数据进行复杂的建模和分析,并不断探索有效的信号处理方法。通过与柔性传感技术相结合,软体机器人可以更好的利用反馈信息,在复杂的极端环境中安全、高效、准确地完成任务。
作者在文章中首先总结了由不同软材料制成的柔性传感器(图2),主要包括弹性体材料、导电凝胶、生物衍生材料和复合材料。通过开发新型智能材料,合理设计传感器微结构,可以进一步提升柔性传感器的性能。
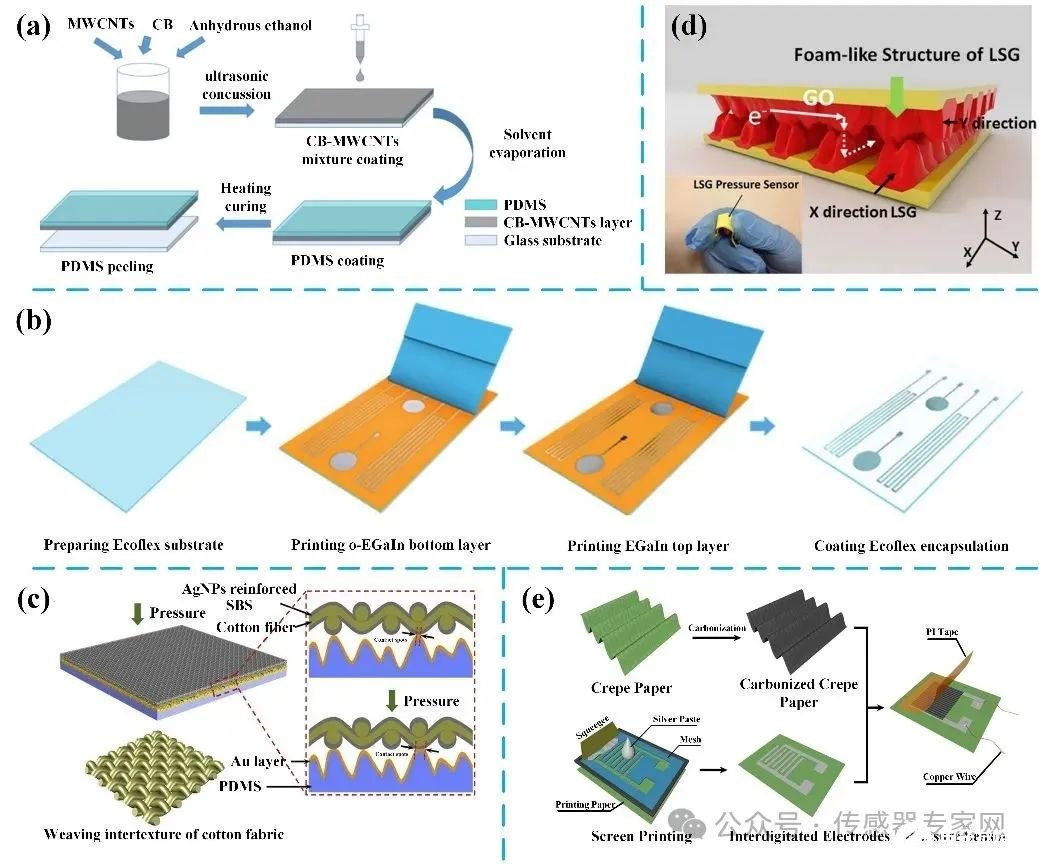
图2 软材料制成的柔性传感器
该文章汇总了具有代表性的柔性传感器制造技术(图3)。3D打印,由于其多功能性,在柔性传感器的制作中越来越受欢迎。通过直接墨水书写,可以将多种材料与复杂几何形状结合,一次性制造功能器件。另外,4D打印在可变形薄片结构制造表现出应用前景,目前主要有两种策略。一种是直接在3D打印过程中使用智能材料,另一种方法是为组件和结构编程,以实现形状和行为的可控变化。除此之外,采用纤维织物和丝网印刷等方法可以实现柔性传感器的可扩展大规模生产。
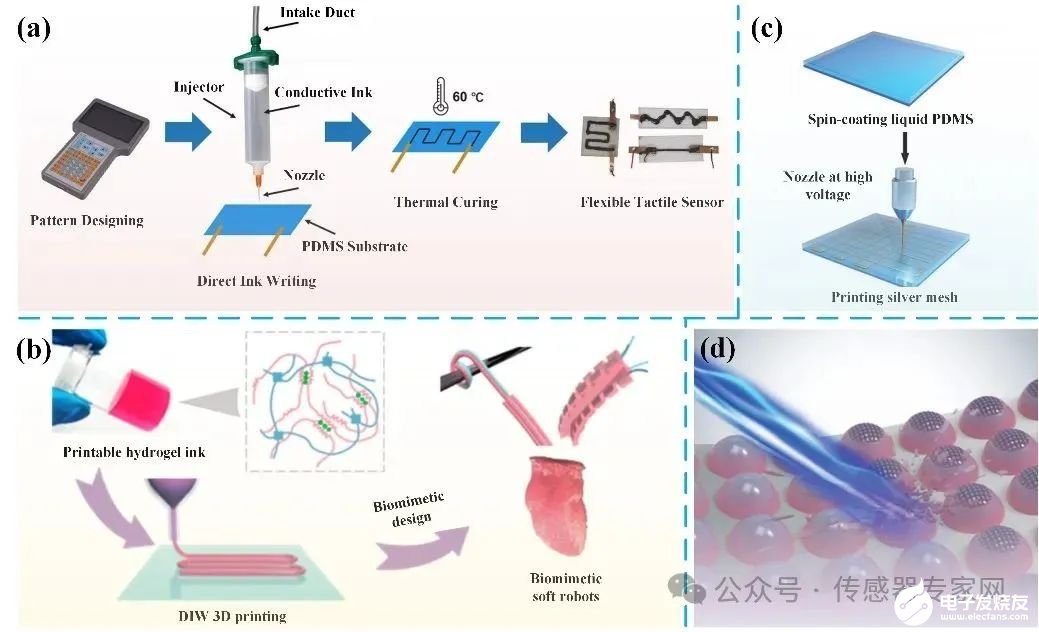
图3 柔性传感器制造技术
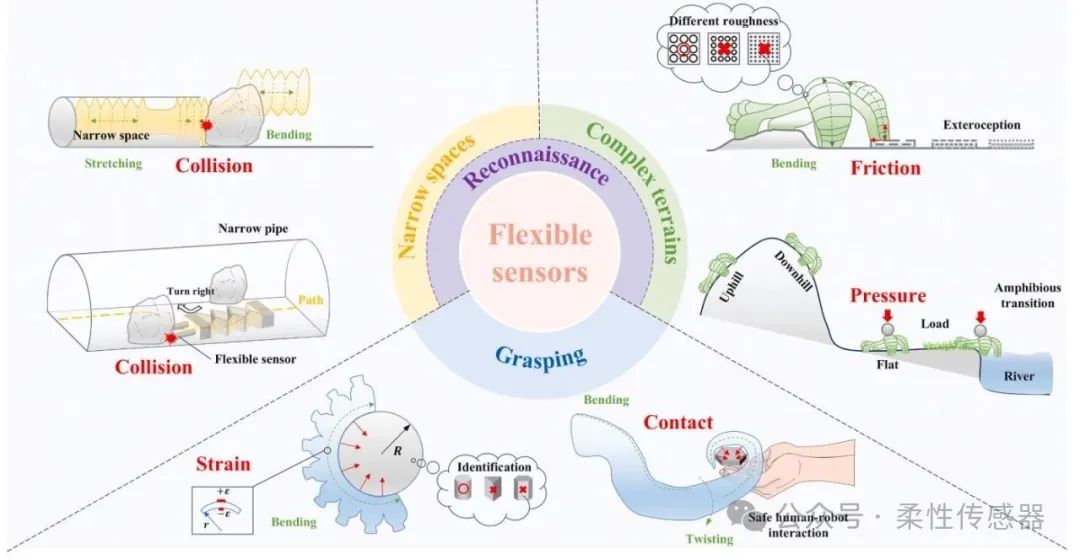
为了可靠地执行预定任务,软体机器人需要识别各部位的形状和位置,以更好地感知自身并与环境互动。文章总结了软体机器人的不同感知模式(图4)。在软体机器人的运动控制中,本体感觉是机器人对自身运动状态理解的关键问题。最常用的一种方法是在腔体通道中嵌入可拉伸应变传感器,将软机器人的形态转换为可测量的信号变化。同时,自适应控制算法用于实现软体机器人的精准闭环控制。而感知外部刺激、有效探索未知世界、安全地与人类和环境交互可以更好地适应各种复杂任务。通过集成柔性传感器,软体机器人具备了人类的外部环境感知能力,进一步提高了它们的智能性和自主性。此外,相关学者还将多模态传感和感驱一体化技术引入到软体机器人领域,提高其复杂任务的执行能力,从而解决一些具体问题。
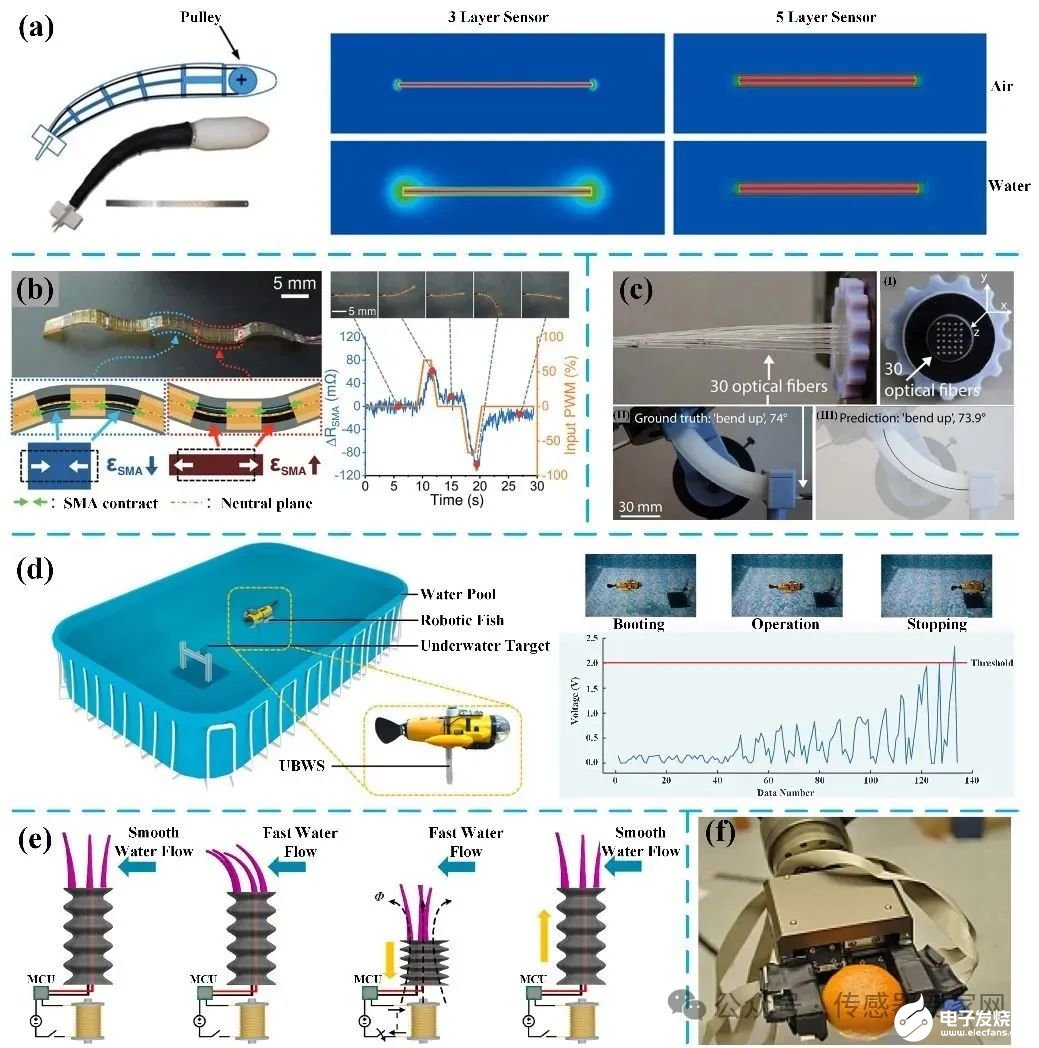
图4 软体机器人本体感觉与外部环境感知
近年来,柔性传感器与软体机器人的集成将任务操作的性能提升到一个新的层面。该文章分别从工业自动化、智慧农业、环境监测与探索、人机交互领域介绍了基于柔性传感器的软体机器人应用场景(图5),如自动化包裹分拣、果蔬生长状态监测、海洋资源勘探等。
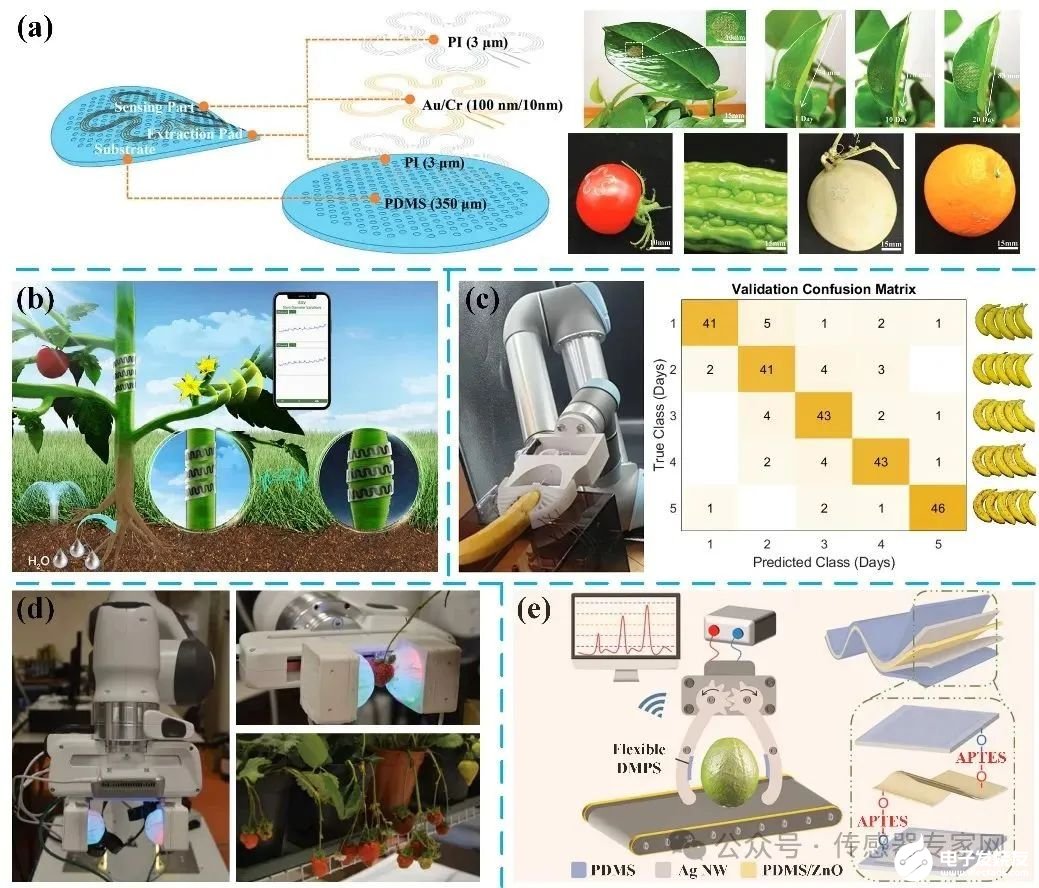
图5 基于柔性传感技术的实际应用
文章作者全面调研了目前国内外学者在软体机器人柔性传感技术领域的研究进展,回顾以往的研究,作者提出了以下3点仍需克服的挑战:
1) 耐久性和稳定性:软体机器人通常工作在不可预测的复杂环境中,如何确保柔性传感器的经久耐用,能够承受连续变形,同时保持传感精度是主要挑战之一。
2) 传感器集成:将柔性传感器与软体结构集成时,需要考虑材料的相容性、机械连接和传感器的布局。确保传感器与机器人的紧密结合,并且能够适应机器人的变形和运动。
3) 适应性和多模态传感:为了提升传感性能,柔性传感器需要适应不同的形状、曲率和表面特征,同时要满足多种模态感知要求。然而不同模态之间可能存在信号交叉干扰的问题,严重影响测量的准确性。
为了解决柔性传感技术在软体机器人应用中面临的挑战,未来可考虑从以下几个方面进行深入研究:
1) 先进材料开发:考虑不同材料的相容性和相互作用,探索具有更高耐久性和柔韧性的多功能复合材料是推进柔性传感器领域发展的重要途径。此外,开发更具生物相容性的新型软材料如生物胶原蛋白和凝胶材料用于制备可植入式柔性传感器。
2) 创新结构设计:采用分层结构设计,将不同功能层叠加在一起,以实现多种传感功能的集成,多层结构还可以提供更好的机械强度和耐久性。另外,通过协调传感器与主体材料的机械性能,保证传感器与软体结构之间的无缝结合,能够进一步提升系统的整体性能。
3) 智能算法集成:人工智能技术与柔性传感器融合后具有强大数据分析和智能决策能力。一是利用机器学习算法可以对海量传感信息进行特征提取,用于训练和建模,实现模式识别和分类任务。二是通过将强化学习算法与经典控制方法相结合,使软体机器人具备自适应学习能力,能够根据环境和任务的变化来调整其行为和控制策略。
声明:转载此文是出于传递更多信息之目的,若有来源标注措误或侵犯了您的合法权益,请与我们联系,我们将及时更正、删除,谢谢。
-
人工智能
+关注
关注
1821文章
50366浏览量
267045 -
软体机器人
+关注
关注
1文章
116浏览量
12154 -
柔性传感
+关注
关注
1文章
19浏览量
2224 -
柔性传感器
+关注
关注
1文章
122浏览量
4885
发布评论请先 登录
博世与清华大学签约,共同探索碳中和领域前沿技术研究合作

清华大学深圳国际研究生院:研发“鸽眼”传感器,让机器人感知逼近人类!

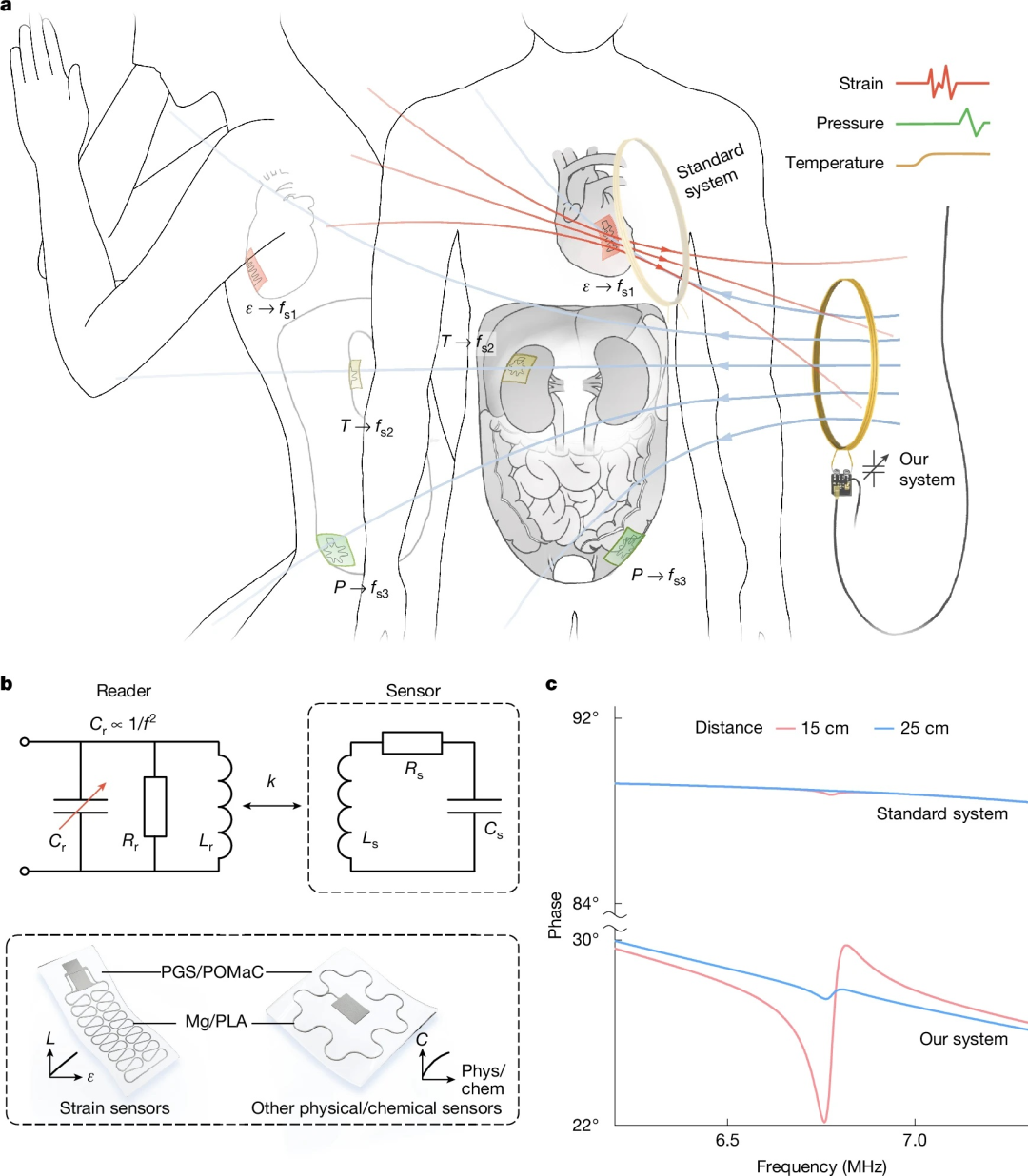
中国科学院与清华大学:在无线传感医疗植入物研究方面取得重要进展
高压放大器在介电弹性体软体机器人中的应用

时识科技DAVIS346传感器助力清华大学突破LIBS技术瓶颈
高华科技与东南大学机器人传感与控制技术研究所签署产学研合作协议

普华基础软件走进清华大学研究生课堂
软智赋能,功放大有可为!Aigtek安泰电子亮相软体机器人大会!

Aigtek安泰电子诚邀您莅临第十届软体机器人大会!

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人
高压放大器在软体机器人研究中的应用




评论