 南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人
南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人

柔性传感器的集成对于软体机器人在复杂变形(如弯曲、扭转、压缩、拉伸等)以及与非结构化环境的交互过程中执行特定任务至关重要。然而,由于软体机器人的高灵活性、变形能力和多自由度,构建高性能的柔性传感器仍然是一个重大挑战。一种有效的方法是将软机器人的连续变形转换为离散表示,这使科学家们能够更好地理解变形过程,并明确表面和界面对传感器性能的影响。因此,可以使用智能算法进一步优化传感器的数量和排列,从而提高整个系统的效率和性能。 重点研究了表面界面构造对柔性传感器性能的影响。首先,基于柔性传感器的基本分类,作者系统地分析了柔性传感器表面和界面的构建策略,包括表面结构优化、微结构阵列设计和空隙结构。其次,作者详细讨论了不同表面和界面的制备方法。然后,探讨了柔性传感器在多个领域的广泛应用。最后,作者总结并展望了柔性传感器的未来发展方向。 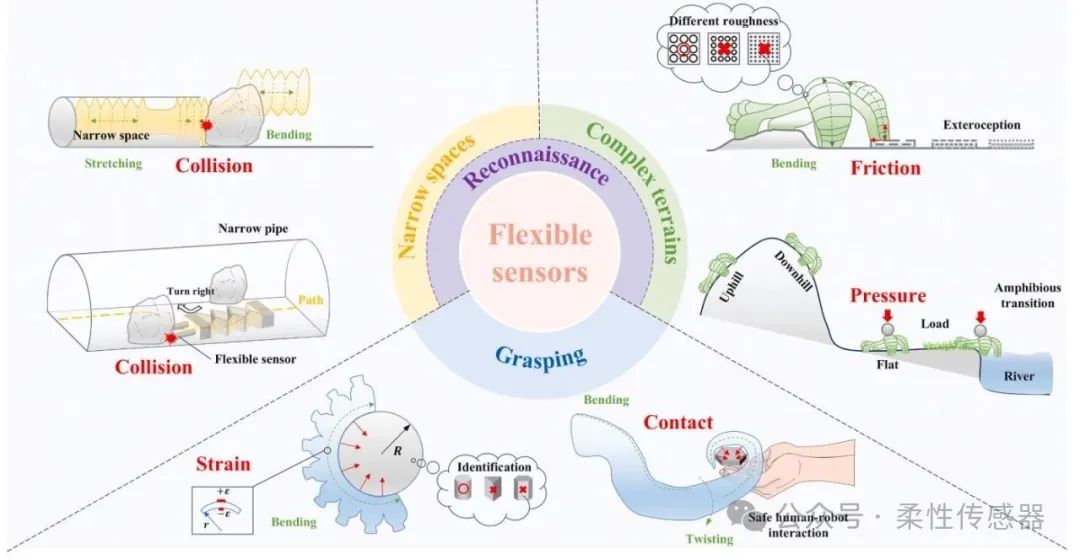 图1 软体机器人在抓取和侦察(包括复杂地形、狭窄空间等环境)领域的应用
图1 软体机器人在抓取和侦察(包括复杂地形、狭窄空间等环境)领域的应用 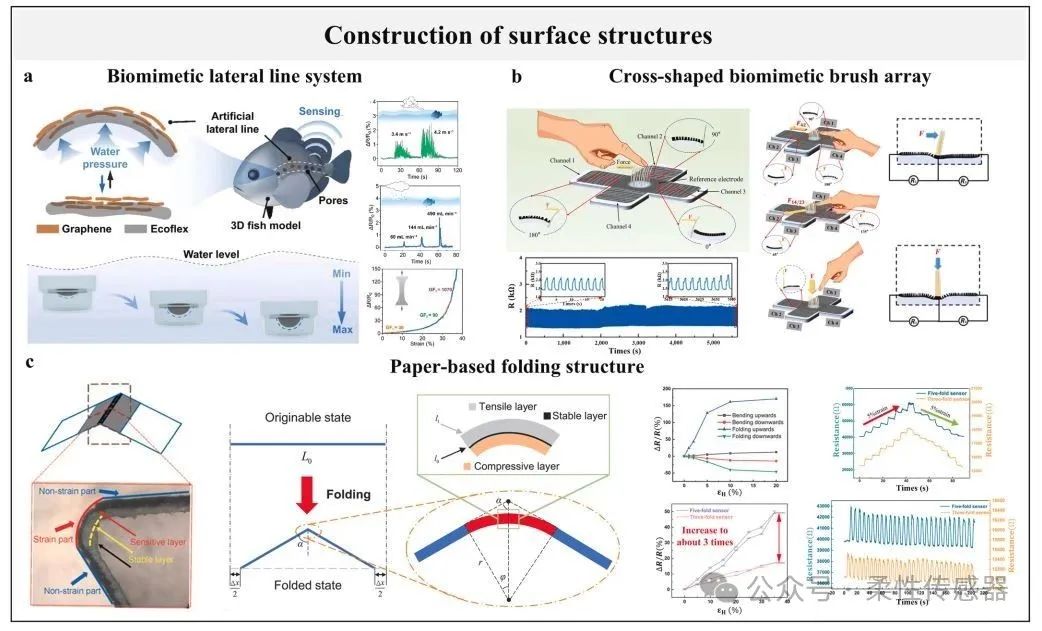 图2 电阻式传感器的表界面优化方法
图2 电阻式传感器的表界面优化方法 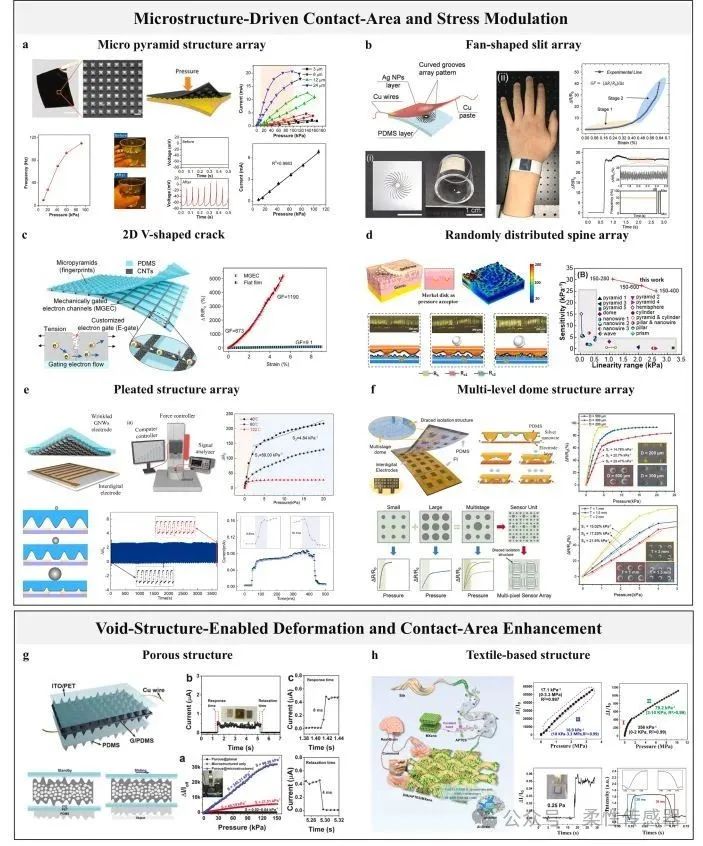 图3 电阻式传感器的表界面优化方法
图3 电阻式传感器的表界面优化方法 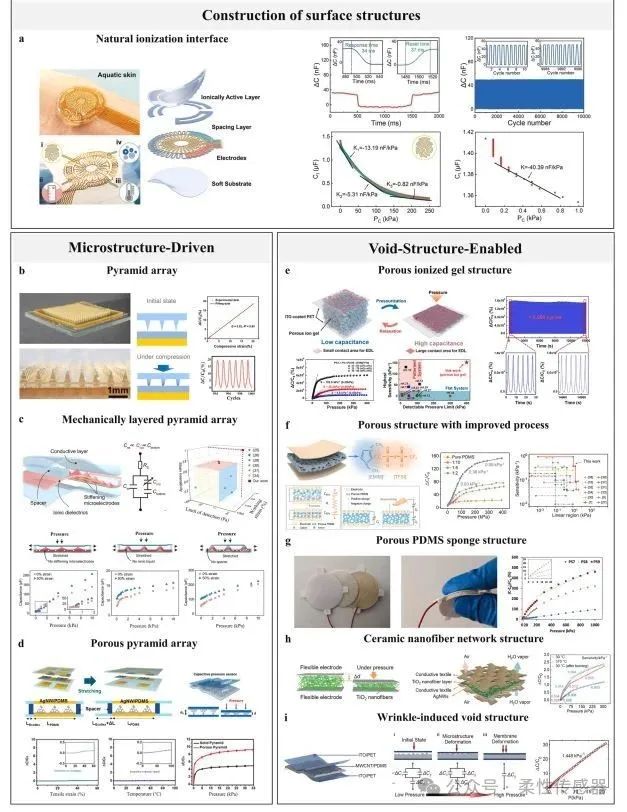 图4 电容式传感器的表界面优化方法
图4 电容式传感器的表界面优化方法 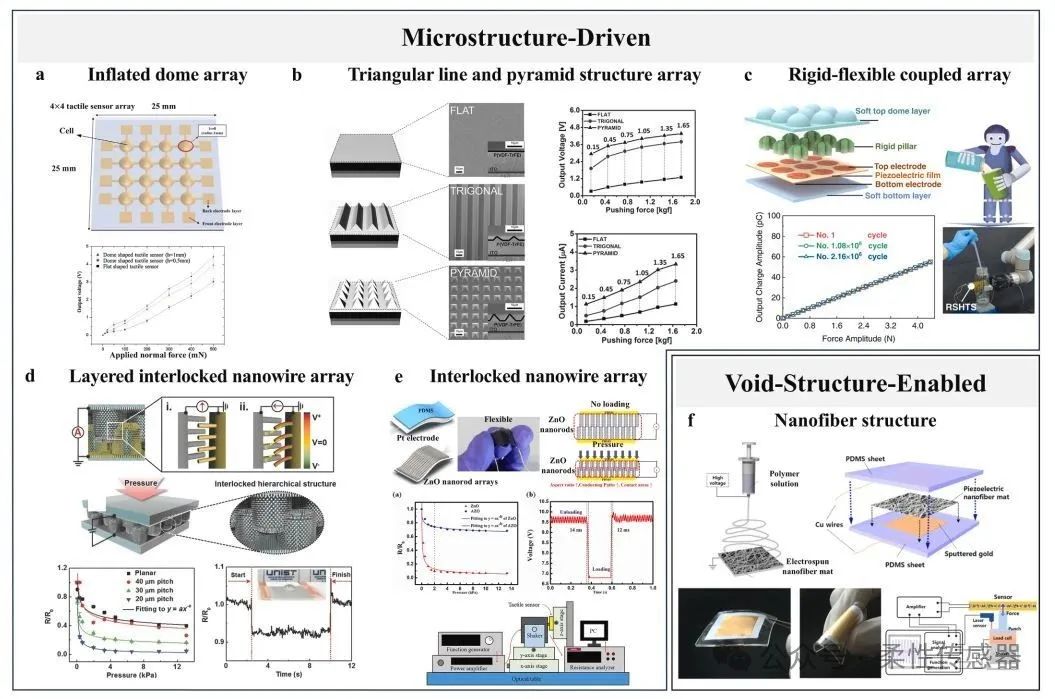 图5 压电式传感器的表界面优化方法
图5 压电式传感器的表界面优化方法 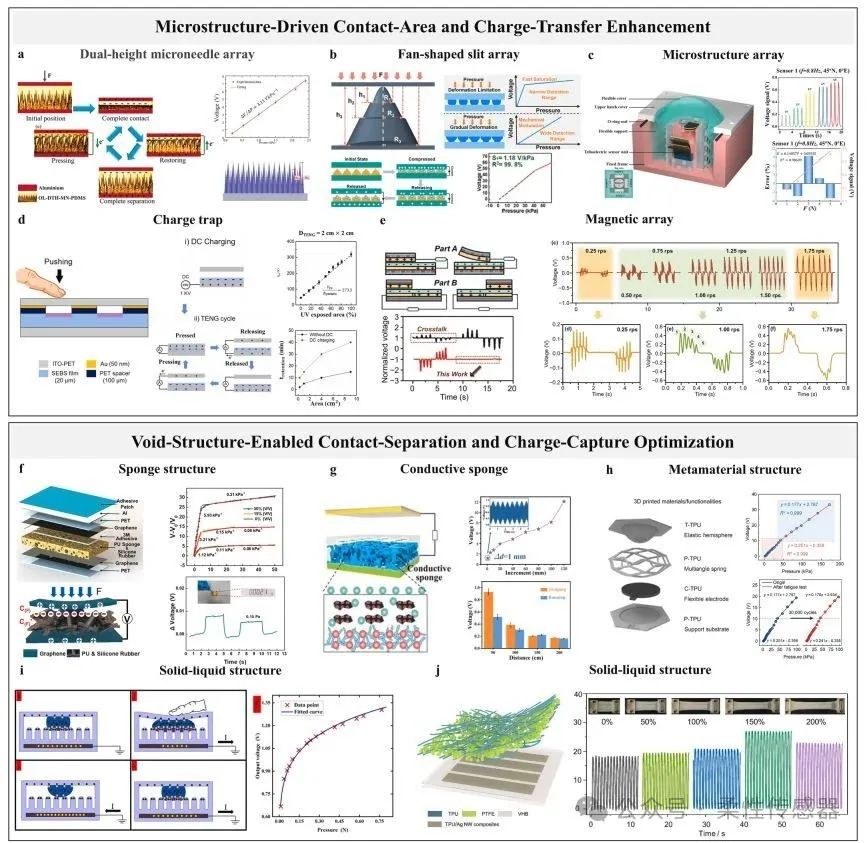 图6 摩擦电式传感器的表界面优化方法
图6 摩擦电式传感器的表界面优化方法 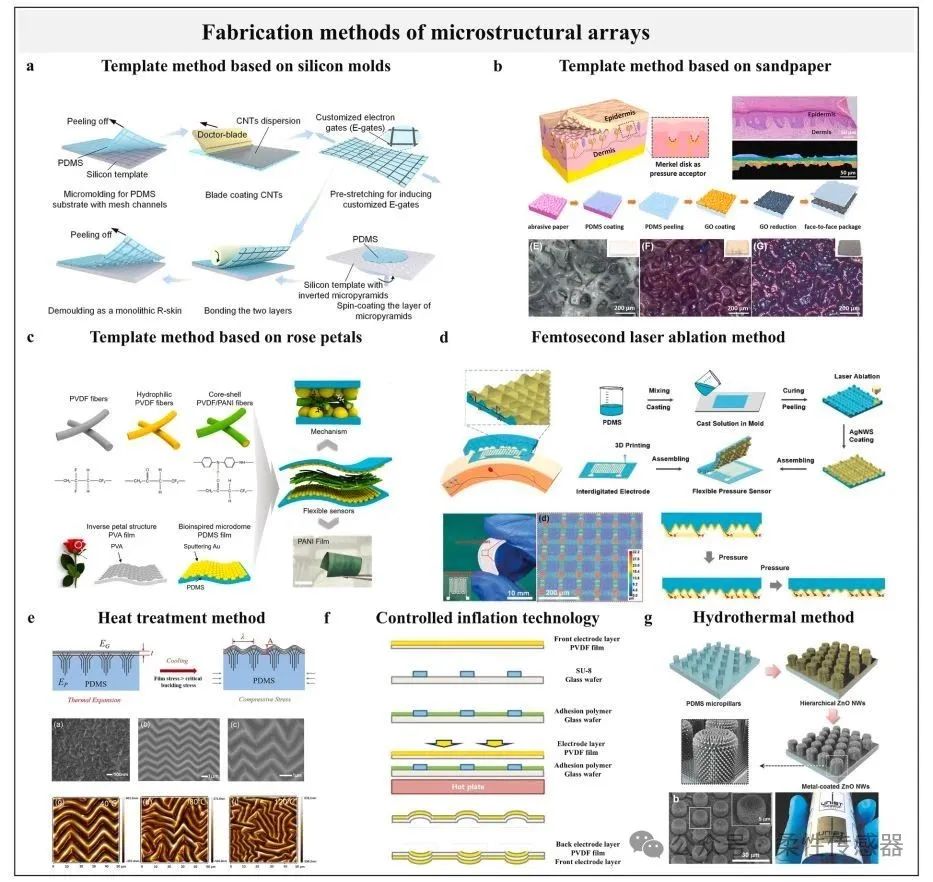 图7 微结构阵列的制造方法
图7 微结构阵列的制造方法 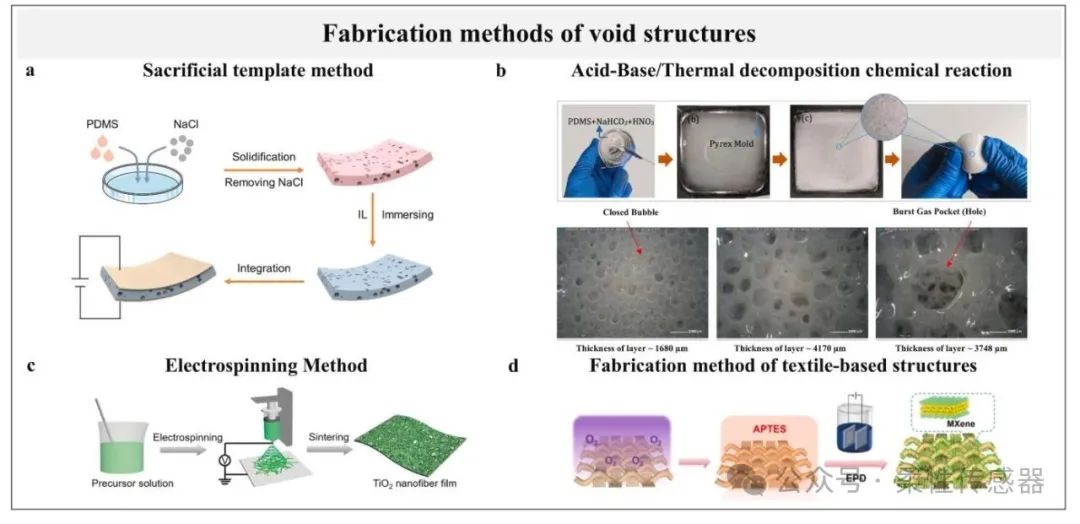 图8 中空结构的制造方法
图8 中空结构的制造方法 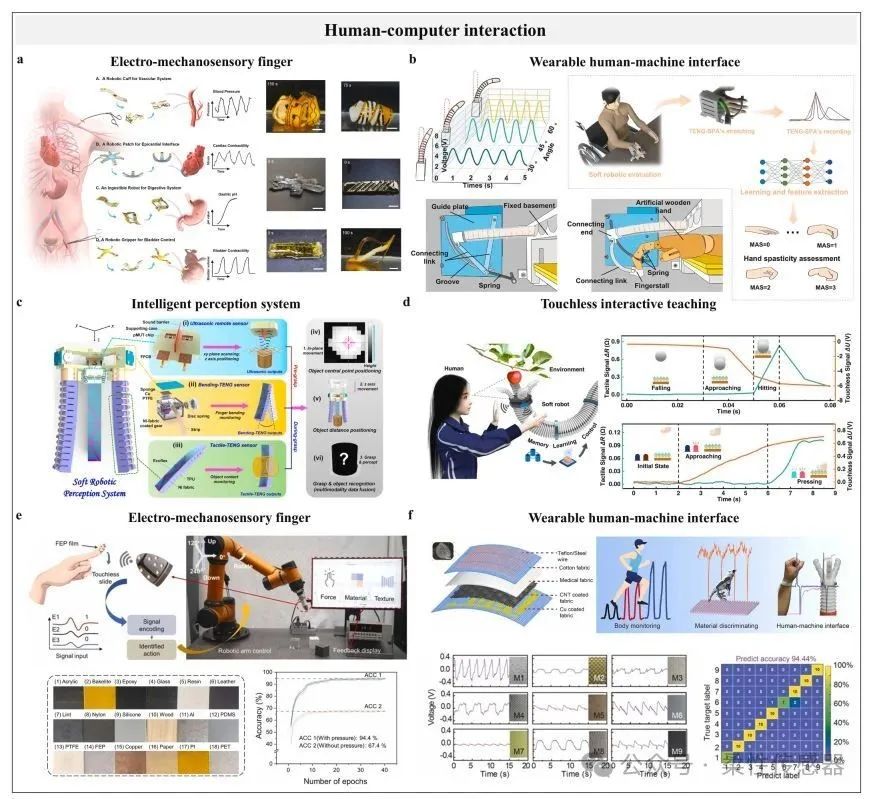 图9 人机交互的应用场景
图9 人机交互的应用场景 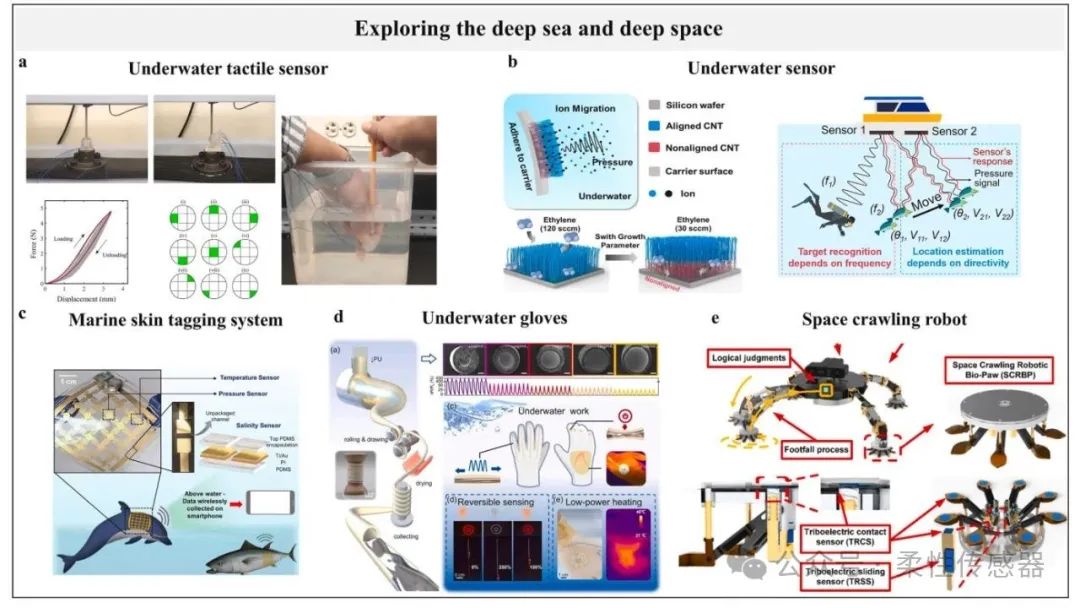 图10 深海和深空探测领域应用场景 审核编辑 黄宇
图10 深海和深空探测领域应用场景 审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55811浏览量
795402 -
机器人
+关注
关注
214文章
31634浏览量
224480
发布评论请先 登录
相关推荐
热点推荐
北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化
。然而,因各层材料模量存在差异,传感器多层结构间产生的力学失配问题,始终是研发具备可靠界面稳定性的高性能触觉 / 压力传感器的一大挑战。 北

北京理工大学集成电路与电子学院和紫光同创国产FPGA课赛结合实验室揭牌
2月5日,北京理工大学集成电路与电子学院-紫光同创“国产FPGA课赛结合实验室”揭牌仪式在北京理工大学集成电路与电子学院4号教学楼301教室隆重举办!
新加坡南洋理工大学到访水晶光电参观交流
1月30日至2月1日,新加坡南洋理工大学(NTU)副校长(终身学习与校友联系)Waifong Boh教授率30余位EMBA校友到访水晶光电,开展为期三天的深度参访、文化溯源与交流研讨活动。此次跨国
长春理工大学领导一行莅临联合光电参观交流
12月26日,长春理工大学党委副书记周庆才、就业创业指导中心主任贾彦彬等一行莅临联合光电参观交流。联合光电创始人谢晋国、人事总监甘露热情接待并全程陪同,双方围绕深化产教融合、拓宽人才输送渠道展开深入探讨。
合众思壮与河南理工大学达成战略合作
12月18日,北京合众思壮科技股份有限公司(以下简称“合众思壮”)与河南理工大学战略合作签约仪式圆满举行。河南理工大学学术副校长金双根、测绘与国土信息工程学院党委书记张红霞、院长袁占良,合众思壮总经理朱兴旺、首席科学家沈军,以及双方相关部门负责人等共同出席了签约仪式。
太原理工大学采购南京大展的差示扫描量热仪和导热仪
众多仪器品牌,太原理工大学经过前期的市场调研和对比,决定选择南京大展的DZ-DSC300C差示扫描量热仪和DZDR-AS导热系数测试仪。DZ-DSC300C是一款采

晟矽微电与上海理工大学深化产学研合作
12月16日,上海理工大学光电学院副院长高秀敏率专家教师团到访晟矽微电总部,开展校企联动交流,共话产教融合新篇章。
安徽理工大学采购了南京大展的高温热重分析仪
和对比,安徽理工大学采购了南京大展的DZ-TGA105高温热重分析仪。DZ-TGA105是南京大展推出一款高温热重分析仪,具有宽泛的温度范围,能够从室温升至155

中汽中心赴武汉理工大学走访交流
2025年11月6日,中汽中心党委副书记王晓杉一行赴武汉理工大学走访交流,与武汉理工大学党委常委、副校长胡剑就进一步深化校企合作进行交流座谈。
上海理工大学师生一行走进简仪科技总部
10月15日,上海理工大学师生一行走进简仪科技 (JYTEK) 总部,参加“医学人工智能实践教育基地”揭牌仪式暨首场AI实训活动。本次活动由上海理工大学健康与工程学院主办,简仪科技承办,标志着校企双方在人工智能与智能测控教育融合上的合作正式落地。
武汉理工大学采购南京大展的导热系数测定仪
在材料科学研究的前沿探索中,准确测量材料的导热系数对于揭示材料热传导特性、推动新型材料的研发很重要。为了更加准确的研究不同材料的导热特性,武汉理工大学经过前期的调研,选购了南京大展的DZDR-S导热

北京理工大学生命学院:研发新型电化学生物传感器,聚焦血糖监测技术突破
detection of glucose in whole blood”的研究论文,该工作创新性地提出了一种基于Ni₃(HITP)₂-MOF与新型抗污材料的分子印迹电化学传感器,实现了全血中葡萄糖的直接检测,为生物传感技术的发展提供了新思路与新方法。 该工作以北京

华东理工大学信息学院校友会走访兆芯
近日,华东理工大学信息科学与工程学院(简称“华东理工大学信息学院)校友会组织近20名校友走访上海兆芯集成电路股份有限公司(简称“兆芯”),开启了一场兼具专业深度与实践温度的探“芯”之旅。
上海理工大学师生一行莅临意瑞半导体参观交流
近日,上海理工大学师生42人前来参访意瑞半导体(上海)有限公司。旨在深化校企交流,助力高校学子了解半导体行业前沿动态与企业发展实践。
香港理工大学选购我司HS-TGA-101热重分析仪
近日,香港理工大学成功采购我司的HS-TGA-101热重分析仪,为其科研工作注入强大动力。此次合作,标志着双方在材料科学、化学工程等多领域研究上迈向新高度。香港理工大学热重分析仪作为科研关键设备




评论