 康谋分享 | aiSim5仿真场景重建感知置信度评估(三)
康谋分享 | aiSim5仿真场景重建感知置信度评估(三)

aiSim5重建高精度的真实交通场景,用于测试和训练ADAS/AD系统。内置场景包括赛道、车库、高速公路和城市环境。通过全局行动日志,aiSim能将驾驶数据转化为场景重建。车道线检测算法在仿真与现实世界的相关性测试中误差相近,召回率均接近98.5%。多目标检测算法在仿真中的召回率为64.68%,与真实世界的68.8%相近。
一、具体应用
仿真场景重建,即在aiSim中重新模拟由装备了传感器的实际数采车辆记录的交通情况,重建原始交通状态、对象和事件,并能够自由的进行调整,可应用于:
1、重建现实世界的交通问题
在aiSim中重建现实世界的交通问题并快速迭代出可能的解决方案,比如模拟特定交叉路口交通情况,测试新的路口通过策略。
2、生成合成感知数据
生成具有代表性和通用性的合成感知数据,用于训练和验证ADAS/AD系统或其他的相关的NN模型,从而覆盖不同的交通状态和环境。
3、更改测试参数
更改测试参数并将场景转换为闭环测试,用于评估ADAS/AD系统在不同环境下的性能,比如不同天气状态,不同交通密度等,通过闭环测试,可以确保系统在各种预期和非预期的情况下正常工作。
二、内置场景
在aiSim中提供了多种高精内置场景:
1、赛道场景ZalaZone
ZalaZone是位于匈牙利的一个真实世界的测试赛道,在aiSim中,它是基于激光扫描、全景照片(360°)参考以及提供的参考3D模型(交通标志等)进行建模的。

2、车库场景
aiSim中停车场地图是根据平面图、现场测量和照片参考资料进行建模的。几何结构基于激光扫描和平面图数据构建。通过将真实世界的测量数据与仿真中的测量数据进行比较,可以验证aiSim中的人工照明部分。


3、 高速公路场景
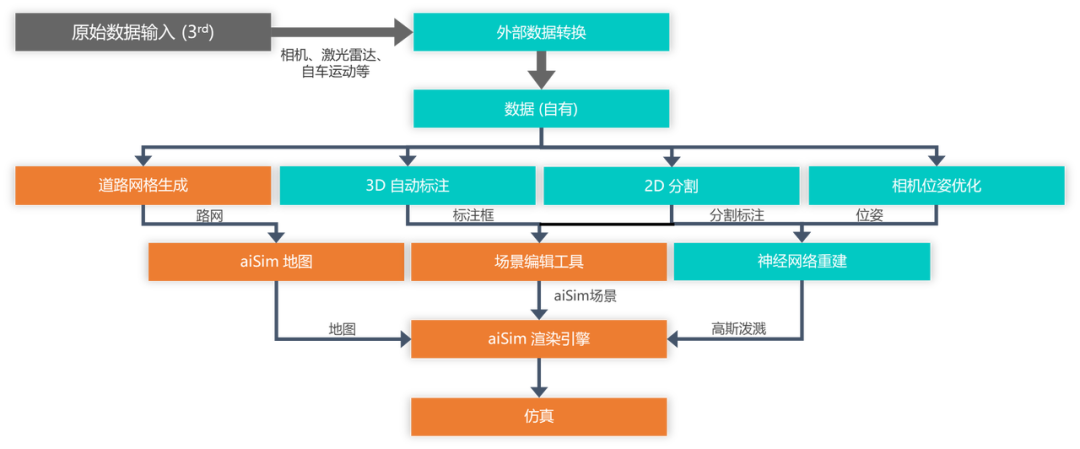
aiSim的高速公路地图大多是基于HD地图生成,并由3D建模工程师进行场景重建:
- 道路网格生成:道路网格是基于HD地图数据生成。
- 道路标线:道路标线也是来源于高清地图,并且精确度可以达到5-10厘米。
- 地形生成:地形是基于可用的高程数据构建的。
- 植被/景观添加:在地形的某些部分,根据图像添加植被和景观,这一步骤使用了aiSim中现有的植被资产库。
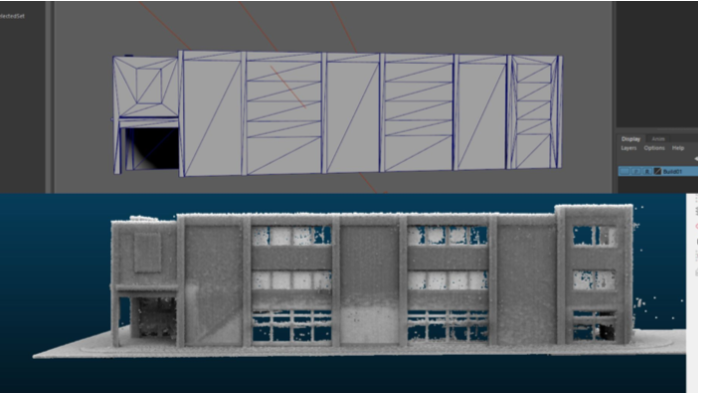
4、城市场景
Budapest_Urban是一个基于HD地图生成的城市场景,它代表了匈牙利首都布达佩斯的城市环境(1.8KM)。此场景中的建筑物是通过摄影测量学(photogrammetry)技术重建的,利用大量记录的图像来创建三维模型。建筑物模型的最大误差为50厘米。
三、全局行动日志
除了通过手动重建交通流以外,aiSim提供一种新的场景重建形式,即全局行动日志。
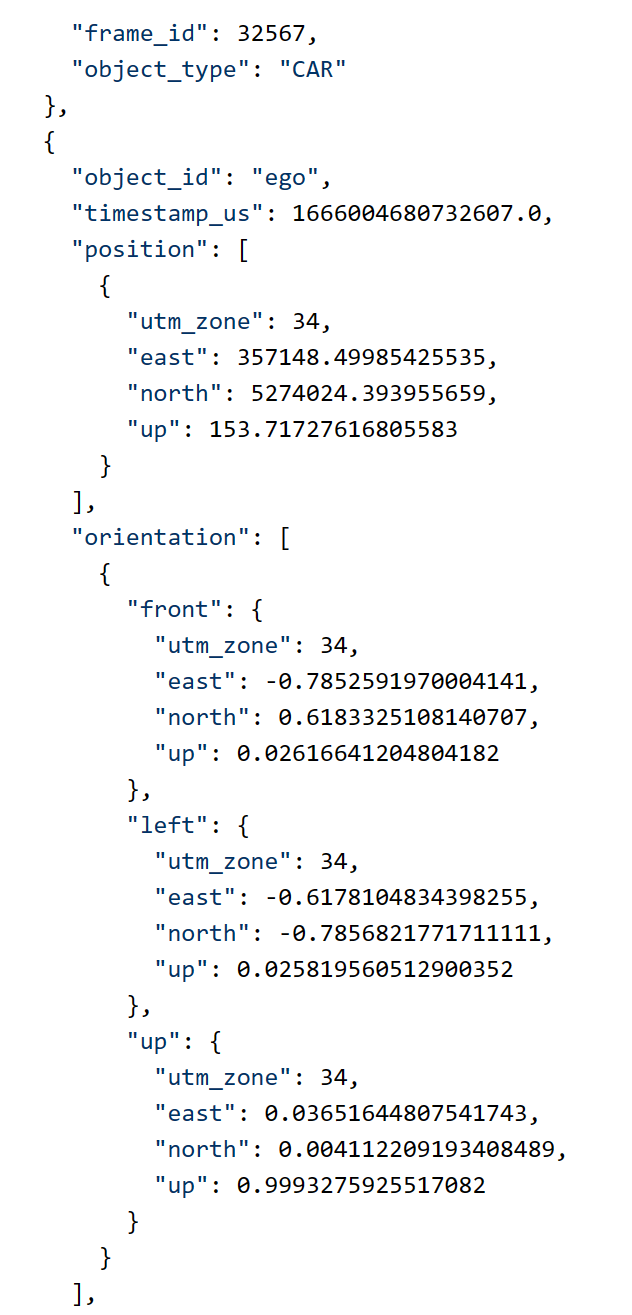
全局行动日志是包含了重建场景对象和其属性的JSON文件。每一条目都包含了对象的相关尺寸,位置等信息,aiSim将会将整个文件中的驾驶数据转化为重建场景。
四、置信度验证
在aiSim的仿真重建场景和真实场景中分别测试了车道线检测和多目标检测算法,以验证重建场景的置信度水平:
1、车道线检测算法相关性
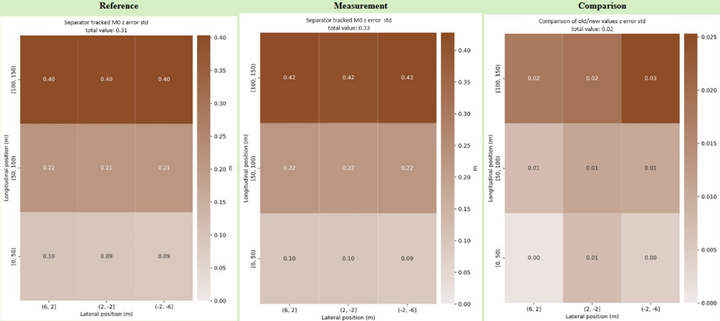
在aiSim中重建M0匈牙利高速公路的数字孪生场景,并模拟与之相匹配的气候条件,验证车道检测算法在虚拟仿真与现实世界中的相关性。
从结果上可以可以看出检测算法在垂直方向上的测量误差的标准差(z erro std):
- 真实世界场景测试0.31
- aiSim仿真场景测试0.33
误差值主要分布在纵向远距离[100,150]米的范围内。
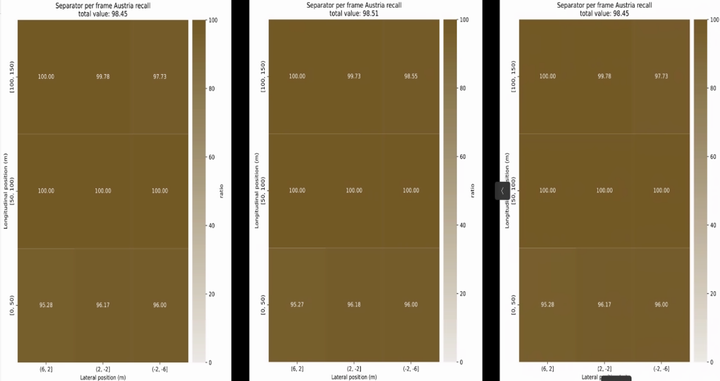
召回率(Recall)指标:
- 真实世界召回率98.45
- aiSim4召回率98.51
- aiSim5 召回率98.45
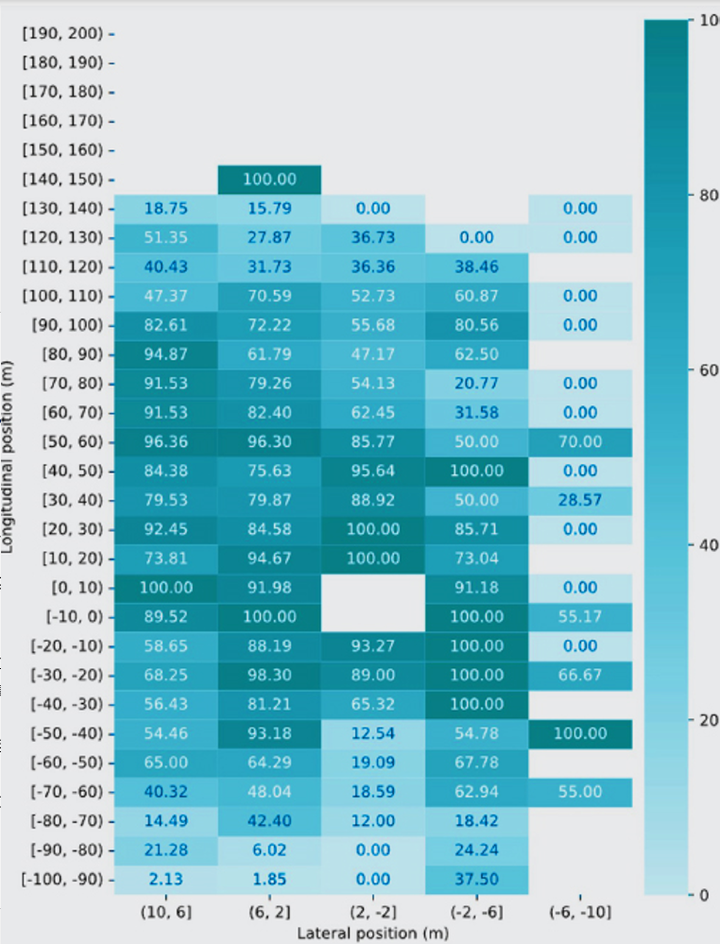
2、 多目标检测算法相关性分析
检测对象:Ego周围的车辆
传感器配置:5×Camera+2×Radar
召回率指标能:
- 在真实世界的数据中,召回率为68.8%
- 在aiSim5仿真世界中,召回率为64.68%
召回率随着距离Ego远近变化而变化。在接近Ego的区域(例如0到30米),召回率较高,而在较远的区域(例如100米以上),召回率有所下降。
以上就是aiSim5仿真场景重建感知置信度评估的全部内容。
作者介绍
崔工
康谋科技仿真测试业务技术主管,拥有超过5年的汽车仿真测试及自动驾驶技术研发经验,熟练掌握仿真测试工具和平台,如aiSim、HEEX等,能有效评估和优化自动驾驶系统的性能和安全性。拥有出色的跨文化沟通能力,成功带领团队完成多项海外技术合作项目,加速了公司在自动驾驶技术上的国际化进程。作为技术团队的核心,领导并实施过大规模的自动驾驶仿真测试项目,对于车辆行为建模、环境模拟以及故障诊断具有独到见解。擅长运用大数据分析和人工智能技术,优化仿真测试流程,提高测试效率和结果的准确性。
-
测试
+关注
关注
9文章
6521浏览量
131799 -
adas
+关注
关注
311文章
2362浏览量
212255 -
自动驾驶
+关注
关注
795文章
15065浏览量
182035
发布评论请先 登录
软件在环(SIL)测试方案及康谋aiSim实现路径

康谋新闻 | 康谋与Coppelia Robotics正式建立合作伙伴关系!

自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
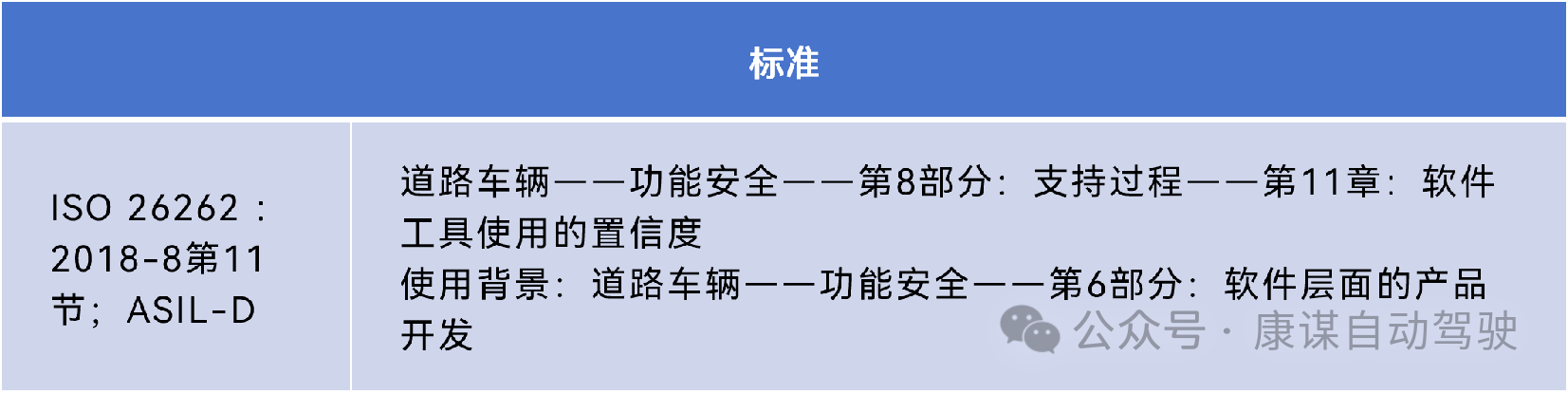
自动驾驶仿真软件推荐:康谋aiSim——ISO 26262 ASIL-D 认证的高保真选择
康谋直播Q A | 康谋智驾仿真测试,共筑智驾安全的「信任密码」!
端到端自动驾驶仿真新范式:aiSim如何解决智驾测试的"灾难性挑战"

跨越“仿真到实车”的鸿沟:如何构建端到端高置信度验证体系?

深度解析:康谋双模态仿真测试解决方案!
端到端智驾模拟软件推荐——为什么选择Keymotek的aiSim?
置信度验证对于自动驾驶来说重要吗?

康谋新闻 | 实力认证!康谋aiSim荣获ASAM“自动驾驶仿真技术奖”
康谋 aiSim 携经纬恒润焕新 HIL 测试,诚邀集成商共建生态!
从“重建”到“可用”:aiSim3DGS方案如何闭环自动驾驶仿真场景?
康谋新闻 | 康谋加入ASAM组织,全球首个ASIL-D认证自动驾驶仿真平台aiSim引领安全新标杆

康谋加入ASAM组织,自动驾驶仿真平台aiSim引领安全新标杆



评论