 康谋方案 | 基于AI自适应迭代的边缘场景探索方案
康谋方案 | 基于AI自适应迭代的边缘场景探索方案

构建巨量的驾驶场景时,测试ADAS和AD系统面临着巨大挑战,如传统的实验设计(Design of Experiments, DoE)方法难以有效覆盖识别驾驶边缘场景案例,但这些边缘案例恰恰是进一步提升自动驾驶系统性能的关键。
本文分享aiFab解决方案,该方案现已具备了更为先进的自适应测试方法,显著提升了寻找极端边缘案例并进行分析的能力。
一、传统解决方案:静态DoE
标准的DoE方案旨在系统性地探索场景的参数空间,从而确保能够实现完全的测试覆盖范围。但在边缘案例,比如暴露在潜在安全风险的场景或是ADAS系统性能极限场景时,DoE方案通常会失效,让我们看一些常见的DoE方案:
1、网格搜索法(Grid)
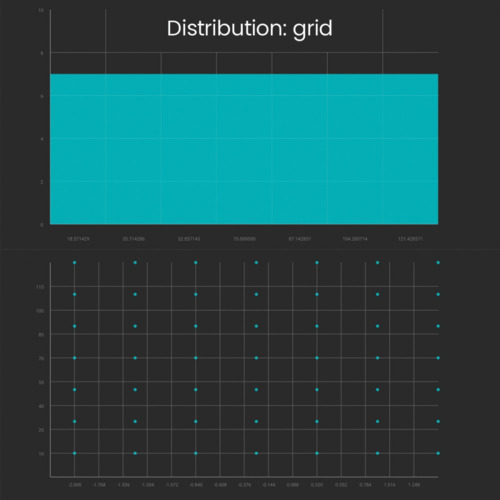
实现原理:将场景空间按照网格进行划分,并测试所有的参数组合。
优势:确保覆盖所有的范围。
缺点:在大参数空间下计算耗时将会难以估计。
2、随机抽样(Random Sampling)
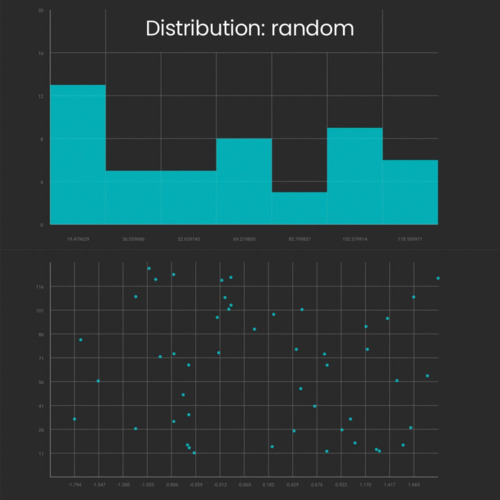
实现原理:在定义的参数空间内进行随机选择测试样例。
优势:易于实现,而且扩展性能好。
缺点:可能会错过重要的样例从而导致测试效果大打折扣。
3、拉丁超立方体抽样(LHS)
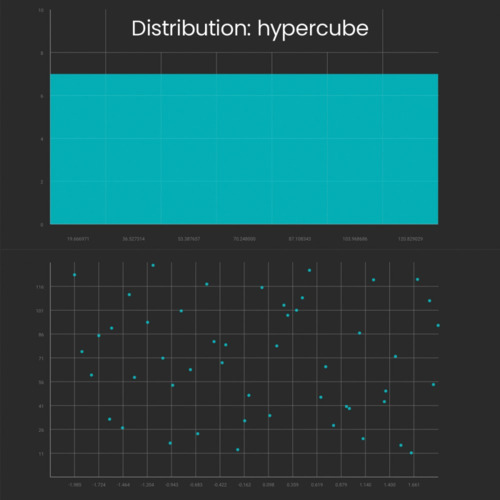
实现原理:确保每个参数在相应区间内进行均匀采样,从而改善数据结果的分布。
优势:比随机抽样效率更高,覆盖范围更加合理,样本分布也更均衡。
缺点:过于均衡从而无法有效考虑到边缘案例的情况。
这些传统方法在一定程度上覆盖了ADAS和AD系统场景测试范围,但是其结果或多或少都存在一定的缺陷,如针对于边缘场景,传统方法没有考虑高风险因素以及自适应学习过往测试结果的过程,针对这一点我们分享一个新的自适应DoE解决方案:aiFab解决方案。
二、aiFab解决方案
在传统的DoE方案中,将所有的场景视作同等重要,然而事实上,在ADAS/AD系统的测试过程中,边缘场景则影响着关键性能的提升。在康谋aiFab解决方案中,基于AI的自适应DoE解决方案将会根据先前的测试结果,动态选择测试用例,在未通过的案例中学习并调整泛化注意力。
1、贝叶斯优化(BO):通过学习优化的智能测试
贝叶斯优化将全量搜索场景的方法转换成由数据驱动的智能方案,与随机取样等方案不同:
(1)BO方案将会预测最有可能暴露失败风险的新测试用例。
(2)BO方案采用替代模型Surrogate model,比如采用高斯过程Gaussian Processes,然后通过已有的数据来逼近测试场景参数与关键性指标的映射目标函数。
(3)然后结合采集函数Acquisition Function,比如通过下置信届LCB或者期望改进EI等方法,有效平衡“探索”和“利用”之间的取舍,在有限次数测试下,有效找到目标函数的最优解。
2、映射目标函数之关键性指标
贝叶斯优化依靠关键性指标(KPI)决定了是否为目标场景,aiFab中常见的KPI包括:
(1)碰撞时间TTC:决定车辆距离碰撞有多近
(2)入侵后时间PET:交通冲突后剩余时间间隔
(3)速度变化Delta-v:车辆碰撞过程中的速度变化
通过不同的KPI更新模型,我们的泛化方案能够将计算资源集中在最需要的地方,从而更高效的发现关键边缘场景,而不是在常规场景上耗费时间。
3、仿真记录演示
为说明aiFab自适应泛化场景,以下通过一系列仿真记录来演示自车在不同临界指标下左转的场景,每次迭代将会始终关注更为严苛的边缘案例,以确保能够发现潜在风险。
原始记录:
速度变化(Delta-v):当Ego车辆与 Exo1车辆进行正面高速碰撞时,通过最大化它们的速度,可以使碰撞时的 Delta-v达到最大,从而增加碰撞的严重性。
入侵后时间(PET):用于评估潜在碰撞或接近碰撞的风险,即那些可能由于交通流或信号变化而产生的高风险情形。
入侵时间(ET):评估车辆在交通冲突区域(如交叉口或其他关键区域)停留时间的指标,特别是当车辆的速度较低时。它反映了“Ego”车辆在这些区域内暴露于潜在风险的时间长度。
潜在碰撞时间(PTTC):是通过车道基础的度量来实现的,主要聚焦于识别和预防发生追尾碰撞的可能性。
三、结语
凭借最新的自适应DoE功能,aiFab给ADAS/AD验证带来了诸多益处:
(1)更快的发现边缘案例:找到高风险场景而无需全量的网格测试
(2)更低的资源耗费:专注于特定方向的案例场景
(3)更好的风险覆盖范围:提升检测稀少边缘关键场景的能力
通过将自适应测试集成到aiFab中,aiFab解决方案提高了效率,同时增强了ADAS和自主系统的安全性、性能和信心。
-
测试
+关注
关注
9文章
6378浏览量
131643 -
仿真
+关注
关注
55文章
4532浏览量
138652 -
AI
+关注
关注
91文章
40982浏览量
302534 -
自动驾驶
+关注
关注
794文章
14979浏览量
181395 -
汽车
+关注
关注
15文章
4224浏览量
41323
发布评论请先 登录
基于DSP的自适应滤波器的设计方案

借助自适应模块化系统 (SOM)加速边缘创新

深度解析:康谋双模态仿真测试解决方案!
基于react-app配置移动端自适应—淘宝弹性布局方案
EdgeBoard FZ5 边缘AI计算盒及计算卡
我爱方案网上线RK3399 Pro AI主板方案 非常适合AIoT机器视觉和边缘计算应用
瑞芯微和英伟达的边缘计算盒子方案,你会选哪一家的?
显控和AI计算机方案趋势
索尼投资树莓派,共同开发边缘 AI 解决方案
逆变电源的自适应重复控制方案
赛灵思推出自适应SOM为AI赋能边缘应用提供更高效解决方案
康谋分享 | 汽车仿真与AI的结合应用

康谋新闻 | 康谋与Robotec.ai正式建立合作伙伴关系!




评论