 如何选择适合的智驾仿真工具进行场景生成和测试?
如何选择适合的智驾仿真工具进行场景生成和测试?

在自动驾驶技术日益发展的背景下,选择合适的智驾仿真工具进行场景生成和测试显得尤为重要。该工具不仅需要支持高精度的场景重建,还需满足多种环境条件和传感器模型的兼容性。本文将深入探讨如何评估不同智驾仿真工具的性能与特点,以帮助开发者优化自动驾驶系统的测试效率与安全性。
在选择适合的智驾仿真工具进行场景生成和测试时,开发者需要对工具的多项特性进行全面理解和评估。
首先,高精度场景重建是一项基础要求,它能够真实模拟各种驾驶条件,从而提升测试的有效性和可靠性。
其次,工具需具备良好的兼容性,支持不同类型的传感器模型,如激光雷达、摄像头等,以便在多变的环境条件中进行准确测试。
同时,对于场景生成的速度和灵活性也不容忽视,能够快速调整生成环境以应对不同测试需求将极大提高工作效率。
此外,多样化的场景应涵盖城市、郊区、高速道路等多种驾驶环境,确保开发者能够全面评估自动驾驶系统在各种情况下的表现。因此,这些特征构成了开发者选择和评估智驾仿真工具时的重要依据。
如何深入评估智驾仿真工具的场景生成能力?
评估智驾仿真工具的场景生成能力,是确保自动驾驶系统安全性的前提。首先,应关注其高精度场景重建技术,包括对不同天气、光照和交通条件的模拟能力。其次,工具应具备灵活的场景编辑功能,便于开发者根据实际需求自定义测试环境。此外,对生成场景的多样性和复杂性的评估同样重要,例如在高速公路、城市道路和乡村公路等不同场景中的表现。开发者还应重视仿真工具对各类传感器模型的兼容性,以保证全面覆盖各种驾驶情境和应对复杂环境变化。因此,在选择适合的智驾仿真工具时,综合考虑上述因素将有助于提高自动驾驶系统的测试效率与安全性。
选择智驾仿真平台时需注意的关键特性
在选择用于场景生成和测试的智驾仿真工具时,有几个关键特性值得特别关注。首先,高精度场景重建能力是必须的,能确保模拟环境能够真实反映实际驾驶条件。这对于验证自动驾驶系统的精确度至关重要。此外,仿真工具需具备良好的兼容性,支持多种传感器模型和环境条件,如天气变化与光照状况。这样的灵活性能够大大提升测试的覆盖面与有效性。
在选择平台时,开发者应特别注意这些特性,以确保所选工具能够在各种复杂场景下进行有效测试,从而提高自动驾驶系统的安全性与性能表现。
高精度场景重建对自动驾驶测试的重要性
高精度的场景重建在自动驾驶测试中扮演着关键角色。随着自动驾驶技术的持续进步,要求仿真工具具备能真实再现路况和环境变化的能力。这种能力不仅能提升测试的可靠性,还能确保系统在不同条件下的表现。特别是在复杂天气和交通环境中,高精度重建能够有效捕捉到真实世界中的微小变化,从而为功能验证提供更可靠的数据支持。
以下表格概述了高精度场景重建在不同场景下的重要影响:
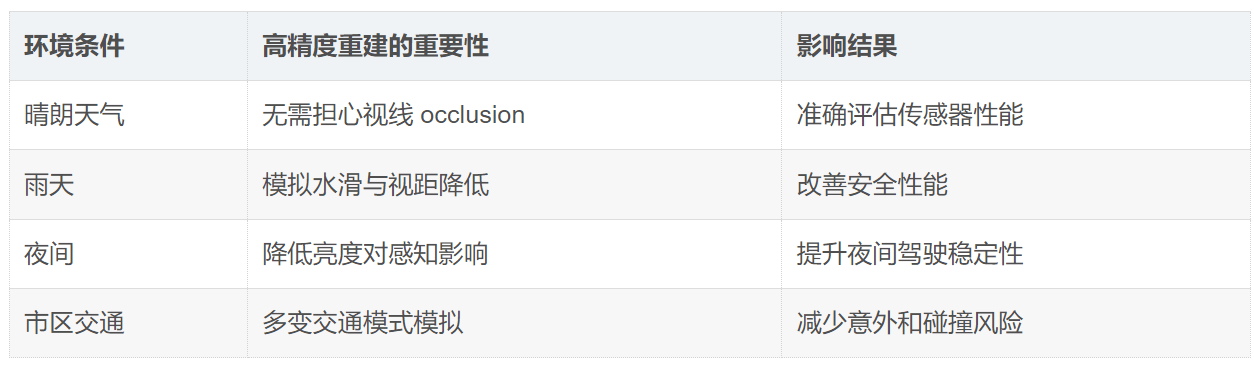
这种精准的仿真能力不仅帮助开发团队识别潜在问题,还能为未来的需求变化做好准备。此外,借助高精度场景重建,开发者能够更有效地优化其自动驾驶系统,提高整体安全性与行驶效率。
兼容多种传感器模型的智驾仿真工具推荐
在选择智驾仿真工具时,兼容性是一个关键考量因素。
工具需支持多种传感器模型,如激光雷达、摄像头和雷达,以确保在不同测试场景下进行有效验证。例如,某些仿真平台能够整合多种传感器的输出,实现不同数据源的融合,提升场景生成的真实感与准确性。此外,这些工具通常兼容如OpenDRIVE和OpenSCENARIO等行业标准,从而加强了不同系统之间的信息交流与集成能力。
在这方面,广泛应用于行业的aiSim平台便以其高兼容性和灵活性受到开发者的青睐,为自动驾驶系统测试提供了强有力的支持。选择那些具备强大传感器模型集成能力的智驾仿真工具,将有助于进一步提升自动驾驶技术的研发效率与安全水平。
案例分享:多样环境下的智驾仿真应用
在自动驾驶研发过程中,选择合适的智驾仿真工具进行场景生成至关重要。
以aiSim平台为例,该平台能够生成多样化的测试场景,包括城市、郊区及高速公路。在真实驾驶环境中,不同天气状况和光照变化对车辆操作性能影响深远,因此其具备的高精度场景重建功能尤为重要。通过仿真工具制作的测试场景,可有效模拟各种路况与环境条件,从而为开发者提供全方位评估其自动驾驶系统的机会。此外,这些工具支持多传感器模型,确保数据收集的全面性,提升测试效率与结果可靠性。通过这样的案例分析,可以更好地理解在日益复杂的自动驾驶实际应用中,智驾仿真工具所扮演的重要角色。
实时高复杂度场景测试的技术挑战与解决方案
在自动驾驶系统的开发中,实时高复杂度场景测试是一项重要任务,它面临着多种技术挑战。
首先,随着传感器的不断升级,识别目标和处理环境信息的需求日益增加,这要求采用更为先进的数据处理能力。其次,场景生成必须能够模拟多个动态因素,例如交通流、天气变化和路况多样性,这些因素对测试结果有着显著影响。因此,选择支持高精度场景重建和多变量动态交互的智驾仿真工具显得尤为重要。针对这些挑战,一些解决方案应运而生,如集成物理引擎进行场景建模,以及采用模块化设计以便快速适配不同传感器模型。这些策略不仅可以提升测试效率,还能增强自动驾驶系统在实际道路环境中的表现能力,从而更好地应对复杂现实情况。
探索自动驾驶系统优化的智驾仿真工具
在自动驾驶领域,选择合适的智驾仿真工具对于提升系统的性能至关重要。这些工具不仅需要具备强大的场景生成能力,还能实现高精度的场景重建。这种精确度能够模拟真实世界中的各种环境条件,从而为测试提供更为严谨的依据。此外,兼容多种传感器模型是另一项关键特性,这确保了系统在不同传感器配置下的测试效果。近年来,一些先进的智驾仿真工具拥有了集成化的平台,使得开发者可以轻松切换不同场景,实现多样化测试,进一步优化自动驾驶技术的开发进程。同时,面对复杂场景生成时,如何有效地利用这些工具进行测试,将直接影响到自动驾驶系统在实际应用中的表现。
结论
选择合适的智驾仿真工具进行场景生成和测试,对于自动驾驶系统的研发至关重要。开发者需要深入理解不同工具在高精度场景重建和环境模拟方面的能力,以确保测试结果的可靠性。在评估过程中,必须关注这些工具对各种传感器模型的兼容性,以及它们是否能有效应对多样化的环境条件。此外,随着自动驾驶技术的发展,实时高复杂度场景测试所面临的技术挑战亟待解决,这也进一步凸显了智驾仿真工具的重要性。通过科学合理的选择与使用,可以大幅提高自动驾驶系统的开发效率与安全性,为未来的发展打下坚实基础。
审核编辑 黄宇
-
仿真
+关注
关注
55文章
4535浏览量
138665
发布评论请先 登录
半导体嵌入式单元测试的核心技术、工具选型与落地全流程
赛目科技Sim Pro工具助力国标仿真测试流程规范落地

Sim Pro 实现仿真测试场景全量构成

自动驾驶仿真测试场景生成方法:从技术突破到工程落地的全维度解析
自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
迈向智驾高阶验证:康谋高保真HIL仿真解决方案,重塑测试价值

康谋直播Q A | 康谋智驾仿真测试,共筑智驾安全的「信任密码」!
C语言单元测试在嵌入式软件开发中的作用及专业工具的应用
CPU的几种复位方式适合哪些场景?
英飞凌IPOSIM平台加入基于SPICE的模型生成工具,助力提升系统级仿真精度

嵌入式软件测试与专业测试工具的必要性深度解析
如何选择适合特定应用场景的电能质量在线监测装置?
如何选择适合特定应用场景的隔离模块?
如何选择适合自己项目的通信协议评估工具?

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践




评论