 采用端到端的逆设计方法实现多维度多通道超构表面全息设计
采用端到端的逆设计方法实现多维度多通道超构表面全息设计

导读
近日,北京理工大学光电学院黄玲玲教授团队采用端到端的逆设计方法实现了多维度多通道超构表面全息设计。通过将物理设计问题转换为数学优化问题,构建损失函数和超构表面结构参数之间的直接关联关系,基于优化算法,实现了从目标图像输入到超构表面参数输出的端对端设计,简化了设计流程,提升了多通道全息图像的重建质量。相关成果以“Multi-dimensional Multiplexed Metasurface Holography by Inverse Design”为题发表于Advanced Materials期刊。北京理工大学光电学院蒋强副研究员和黄玲玲教授为论文通讯作者,硕士研究生尹永耀为论文第一作者。
研究背景
超构表面由二维排列的亚波长超原子组成,作为新型微纳光学器件,已成为电磁空间工程和控制波传播的范例。超构表面可以在亚波长尺度实现对电磁波的振幅、相位和偏振等维度的灵活调控。通过采用多维复用设计,多功能超构表面器件可以显著减小光学系统的尺寸。将超构表面引入全息中,解决了传统基于空间光调制器的全息显示存在的高阶衍射、视角小、空间带宽积小等问题,并可以大大扩展传统全息技术的信息容量。实现多维复用超构表面全息的长期采用的方法是正向设计,这通常需要广泛的物理知识来确定超原子排列策略和全息图计算算法。例如,要实现无串扰的彩色超构表面全息术,直接的途径是空间复用策略,但这种策略牺牲了空间分辨率并可能导致高阶衍射。更高自由度的超原子也许能一定程度上解决问题,但往往对加工提出新的挑战,并且需要很长时间来构建超原子响应数据库。
研究亮点
在该工作中,为了打破正向设计的限制并简化设计流程,团队提出了一种端到端的逆向设计框架,如图1所示。通过将超构表面直接与多个目标全息重建图相关联,并根据重建图像质量指导优化过程,实现超构表面的尺寸参数的更新,基于低自由度超原子实现了多维度超构表面的端对端设计。
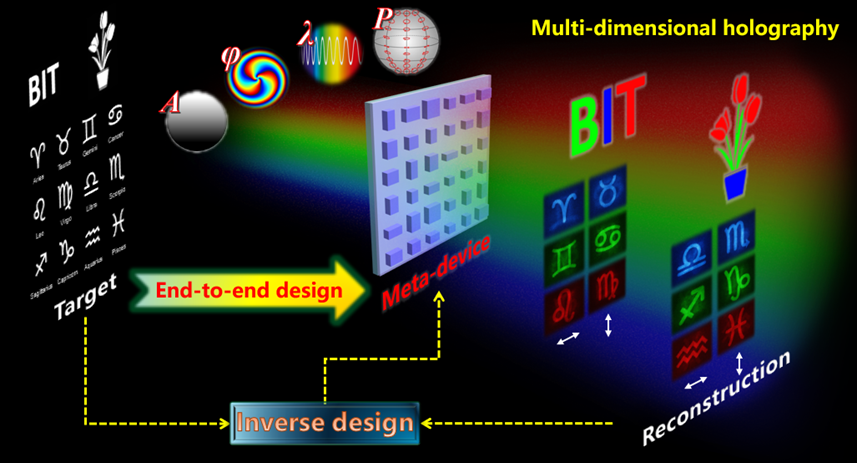
图1 多维度复用超构表面全息的端到端逆设计框架
所提出的端对端设计流程如图2所示。在物理设计问题中提取出目标函数、约束条件、求解空间等数学优化问题所需的因素。在初始化过程中,以给定的超原子响应数据库为求解空间,初始化超构表面上各个超单元的结构参数分布,并将散射场通过衍射传播算法传播至对应重建平面,得到数值重建图像。将多通道下的目标重建图像与数值重建图像的均方误差(MSE)作为损失函数,利用伴随算法计算MSE关于各个超单元尺寸参数的梯度,并采用基于梯度的优化算法(移动渐近线法MMA)对超单元结构参数分布进行调整,至此完成一轮优化迭代。每一轮迭代的超单元结构参数分布作为下一轮优化的初始值,经过多轮优化后,损失函数收敛,得到最终的超构表面结构参数,完成多维度超构表面器件的设计。
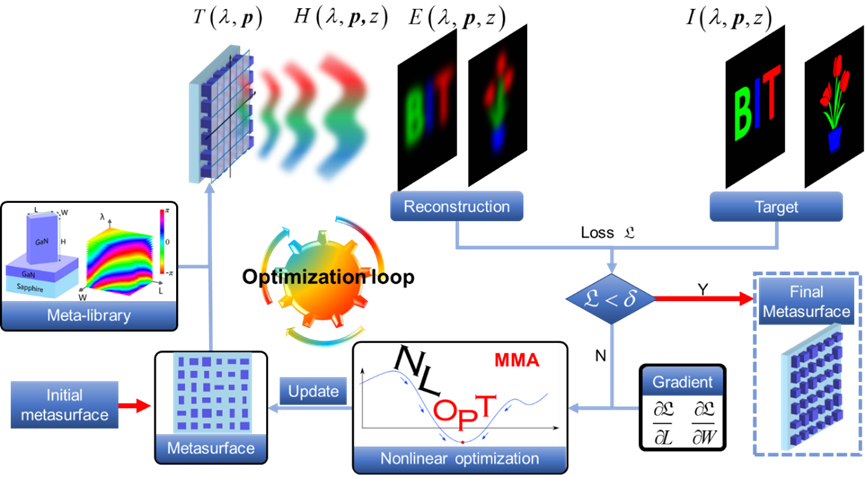
图2 端对端逆设计算法流程图
依靠所提出的逆设计方法,团队设计并实验演示了偏振加密超构表面全息(样品1)和彩色超构表面全息(样品2)。进一步地,将三个波长、两个正交偏振通道、两个重建距离组合,研究人员实现了高达12个通道的多维度多通道复用超构表面全息(样品3)。与正向设计得到的重建图像相比,逆向设计得到的重建图像具有更高的重建质量。
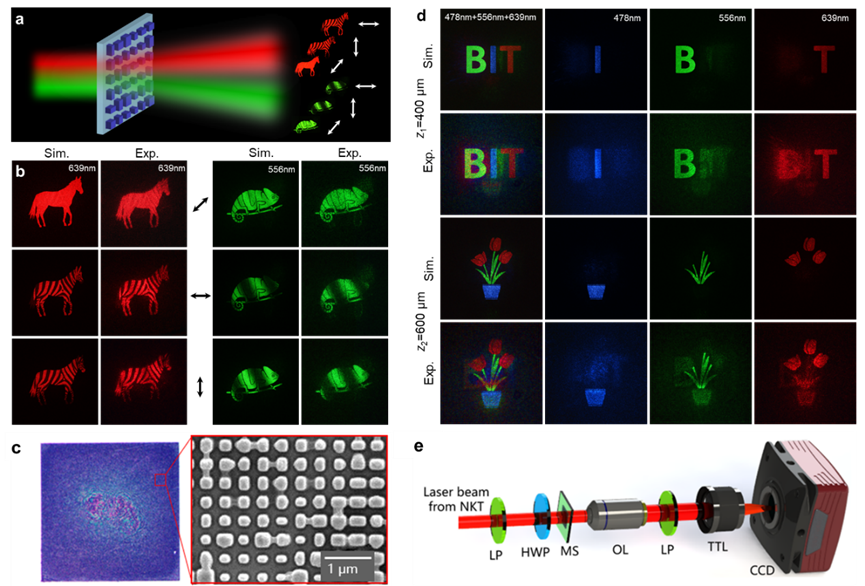
图3 (a)(b)所设计和加工的偏振加密超构表面全息样品1和(c)(d)彩色超构表面全息样品2 (e)为实验光路图
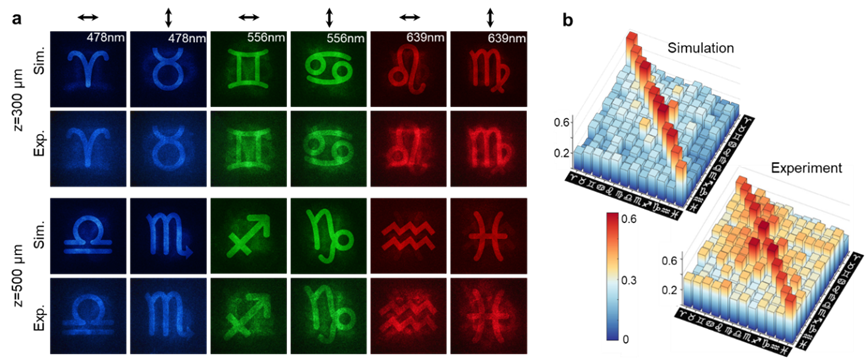
图4 组合波长、偏振和重建距离实现12通道复用的超构表面全息样品3
值得注意的是,本研究中使用仅具有两个自由度的超原子即可实现高达12通道的低串扰全息显示。研究人员对所使用超单元库的完备性进行了分析,图5a和b分别展示了超单元库的相位响应在三波长空间和线偏振空间的映射分布。可以明显看出所使用的单元库是不完备的,无法实现多个波长和偏振态解耦。这种不完备单元库在正向设计中产生的误差是难以消除的。但在逆设计中,由于超构表面单元分布直接对全息重建图像质量负责,没有中间过程的限制,可以很好地统筹每个通道的图像重建效果,实现更高的重建质量。端到端的设计思路显著降低对超原子库完备性的要求。
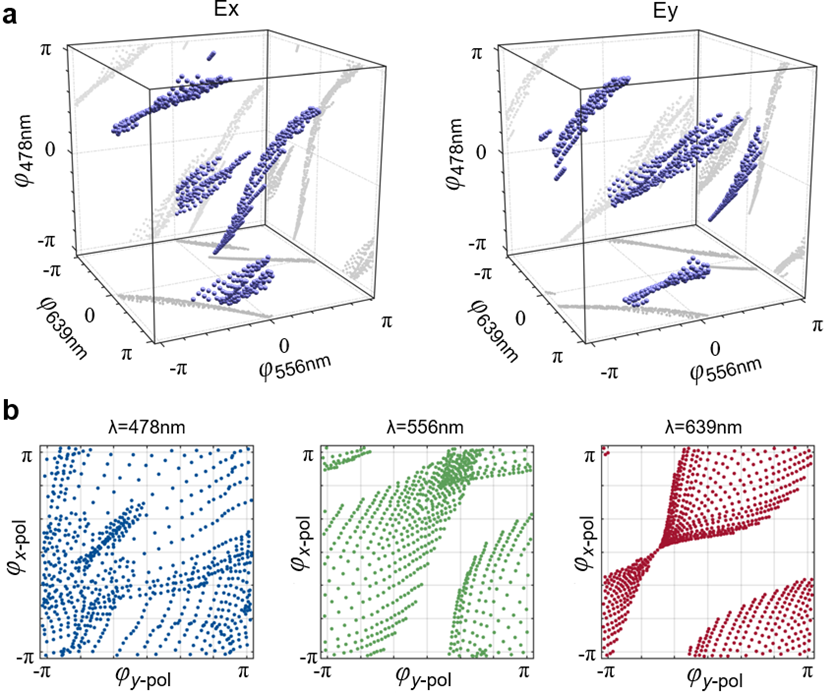
图5 在(a)三波长空间和(b)线偏振空间中对超单元库的完备性分析
总结与展望
研究团队提出了多维度超构表面全息的端到端逆向设计方法,通过仅具有两个自由度的简单超原子实现了包含三个波长、两个偏振态和两个重建平面的共多达12个通道的全息图像显示。该策略通过将超原子映射和散射场衍射传播的两个步骤表示为可微分形式,可同时优化整个过程,从而减少了对利用物理知识计算多通道全息图的依赖。有利于推动多功能超构表面的智能化设计,有望最终加速超构表面器件在彩色显示、成像、存储等领域的应用。
该工作得到了国家重点研发计划、北京市卓越青年科学家计划、国家自然科学基金等支持。
论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/adma.202312303
审核编辑:刘清
-
电磁波
+关注
关注
21文章
1506浏览量
55898 -
MSE
+关注
关注
0文章
7浏览量
6701 -
光调制器
+关注
关注
0文章
95浏览量
8928
原文标题:基于逆向设计的多维度多通道超构表面全息
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
深度学习驱动的超构表面设计进展及其在全息成像中的应用

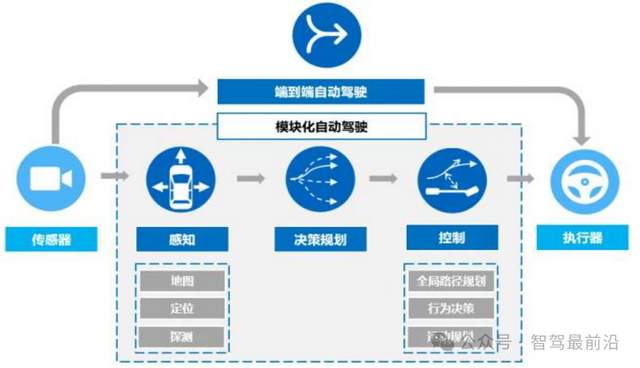
为什么一段式端到端自动驾驶很难落地?

Nullmax感知规划端到端大模型进化提速
端到端自动驾驶仿真新范式:aiSim如何解决智驾测试的"灾难性挑战"

如何训练好自动驾驶端到端模型?

Nullmax端到端轨迹规划论文入选AAAI 2026
自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?

电控可调超表面实现实时太赫兹全息成像




评论