 从4D到4D数字成像,雷达数字化升级助力实现更好的智能驾驶
从4D到4D数字成像,雷达数字化升级助力实现更好的智能驾驶

电子发烧友网报道(文/吴子鹏)近一段时间,智能汽车在传感器方面的热点从激光雷达逐步转移到了4D成像雷达。传统3D毫米波雷达只能检测物体的距离、相对径向速度、水平角度信息,4D雷达则加入了高度信息,并通过类似点云的方式提升了距离分辨率、角度分辨率、速度分辨率等关键信息,因此能够让智能驾驶迈上更高的台阶。
根据信号调制方式的不同,4D雷达分为模拟雷达和数字成像雷达。其中,前者采用基于模拟调制的调频连续波(FMCW)方案,后者则采用数字编码调制(DCM)方案。
作为一家专注于设计4D数字成像雷达解决方案的创新型高科技公司,Uhnder在4D数字成像雷达赛道目前处于领先位置。在该公司举办的以“数字化,新潮流”为主题的技术论坛上,电子发烧友网记者采访了Uhnder首席执行官兼联合创始人Manju Hegde,他详细阐述了Uhnder在4D数字成像雷达方面的技术领先优势,以及借助4D数字成像雷达,现阶段的辅助驾驶,未来的自动驾驶,将会得到怎样的性能加持。

Uhnder首席执行官兼联合创始人Manju Hegde
4D数字成像雷达的领先性
雷达在汽车领域有悠久的发展历史,目前依然是汽车智能感知系统中的重要传感器之一。不过,传统车载毫米波雷达测高能力不足,输出信息质量与摄像头、激光雷达的信息输出质量不在同一量级,4D成像雷达通过类似于激光雷达点云成像的方式改变了这一点。当然,雷达技术演进也是递进式的,开始是3D到4D,然后是4D到4D数字成像。
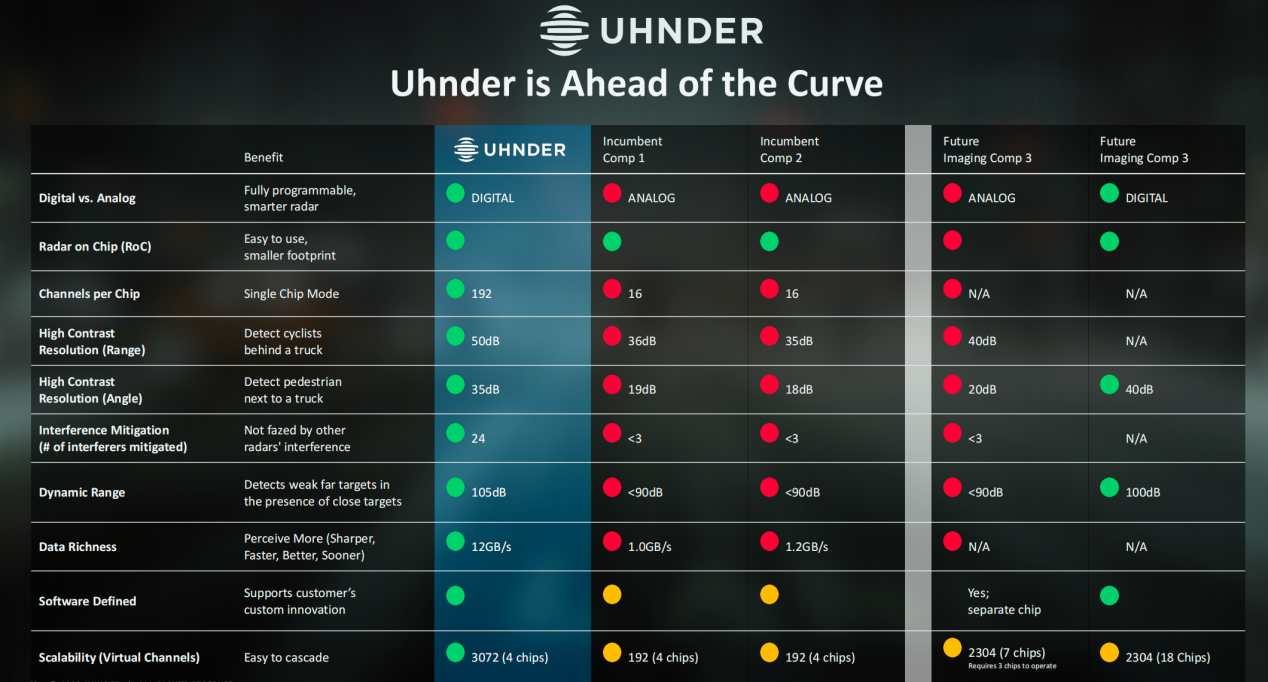
一般模拟雷达的通道数只有12-16个,分辨率较差。而Uhnder的4D数字成像雷达芯片提供最高192个虚拟通道,因此分辨率会得到显著提升。在对比度上,如果车旁边有位成人/小孩,模拟雷达便无法检测到,Uhnder的4D数字成像雷达则能够很好地避免这一情况。另外,在目标反射功率、抗干扰性、传感器融合能力和安全性等方面,Uhnder的4D数字成像雷达解决方案都更具优势。
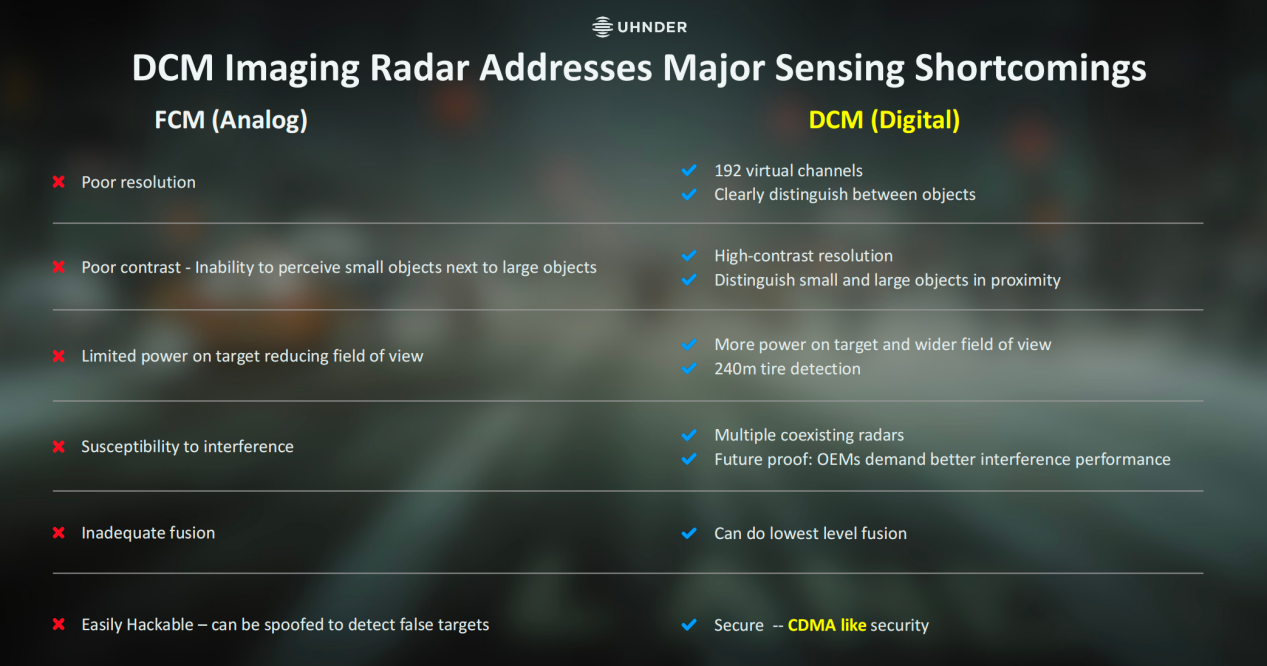
模拟雷达和数字雷达对比
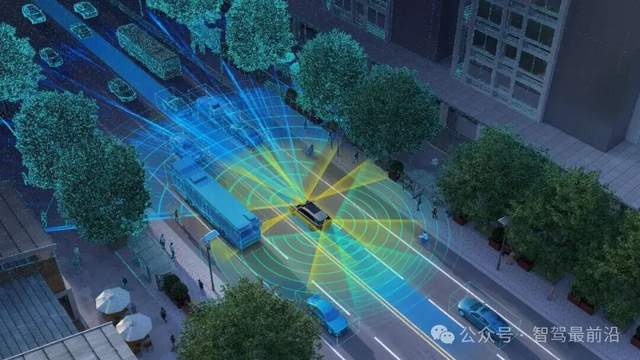
通过Manju Hegde分享的下图也可以看到,不仅是优于模拟雷达,4D数字成像雷达相较于激光雷达和摄像头而言,也做到了很好的性能补充,将能够为辅助驾驶和自动驾驶带来全面的性能和体验提升。
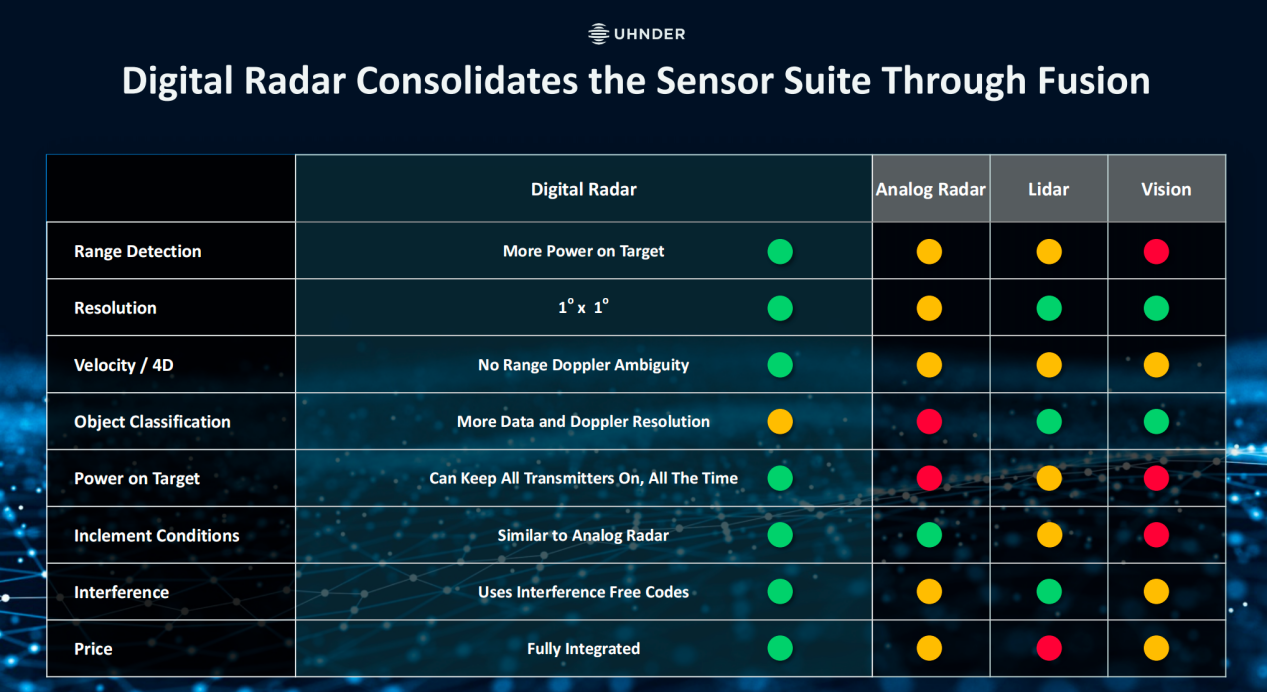
数字雷达和模拟雷达、激光雷达、摄像头对比
2022年3月1日,我国正式实施《汽车驾驶自动化分级》(GB/T 40429-2021)国家标准,与国际汽车工程学会的划分大体一致,将驾驶自动化划分为6个等级,0级是应急辅助,1级是部分驾驶辅助,2级是组合驾驶辅助,3级是有条件自动驾驶,4级是高度自动驾驶,5级是完全自动驾驶。
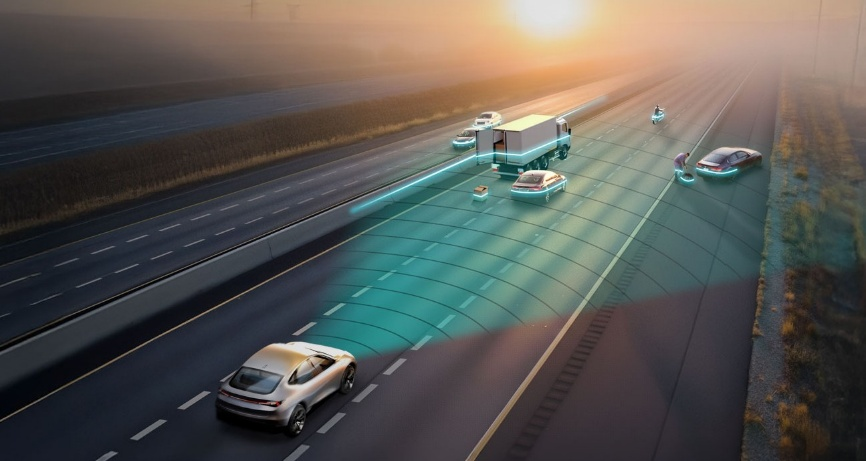
Manju Hegde在分享时提到,L2级自动驾驶实现至少需要3颗雷达——1个前置雷达和2个后置雷达,有时还需要在此基础上增加两个前置雷达,L3级自动驾驶可能需要6颗雷达,L4级自动驾驶可能是8-12个雷达。如此来看,车载雷达未来前景是非常好的。
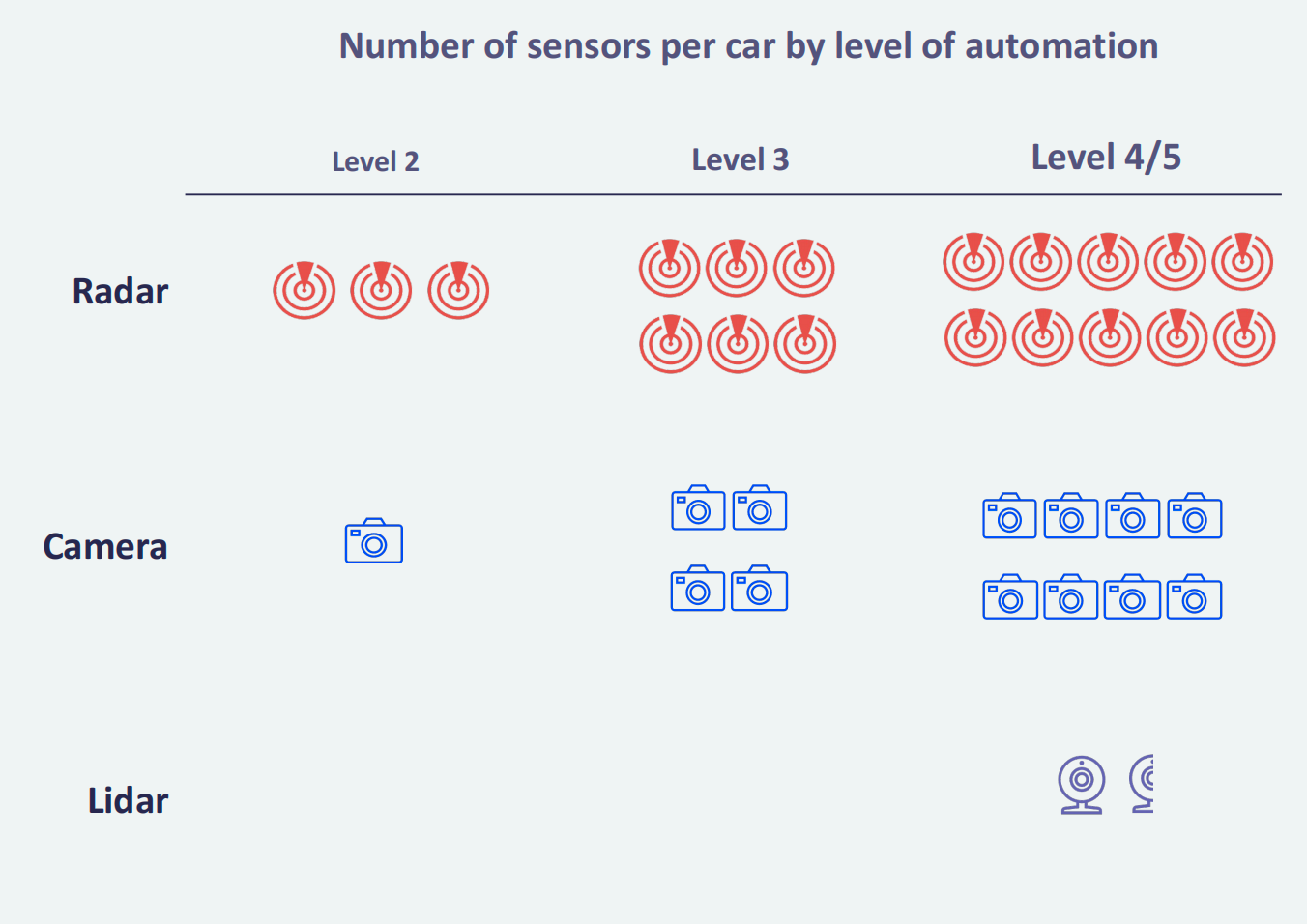
自动驾驶方案传感器配置
从发展现状来看,目前整个4D成像雷达市场还处于发展早期阶段,市面上大部分车型采用的依然是传统毫米波雷达。比如在中国市场,根据智研咨询的统计数据,2021年我国毫米波雷达出货量已达2000万颗,同比增幅超40%;到2026年出货量有望超7000万颗。实际上全球的情况也基本类似。Yole预测4D雷达将在2028年达到约60%的市场占比。2028年4D雷达市场规模将达到83亿美元,较2022年增长36%;4D成像雷达市场规模将达22亿美元,较2022年增长49%。
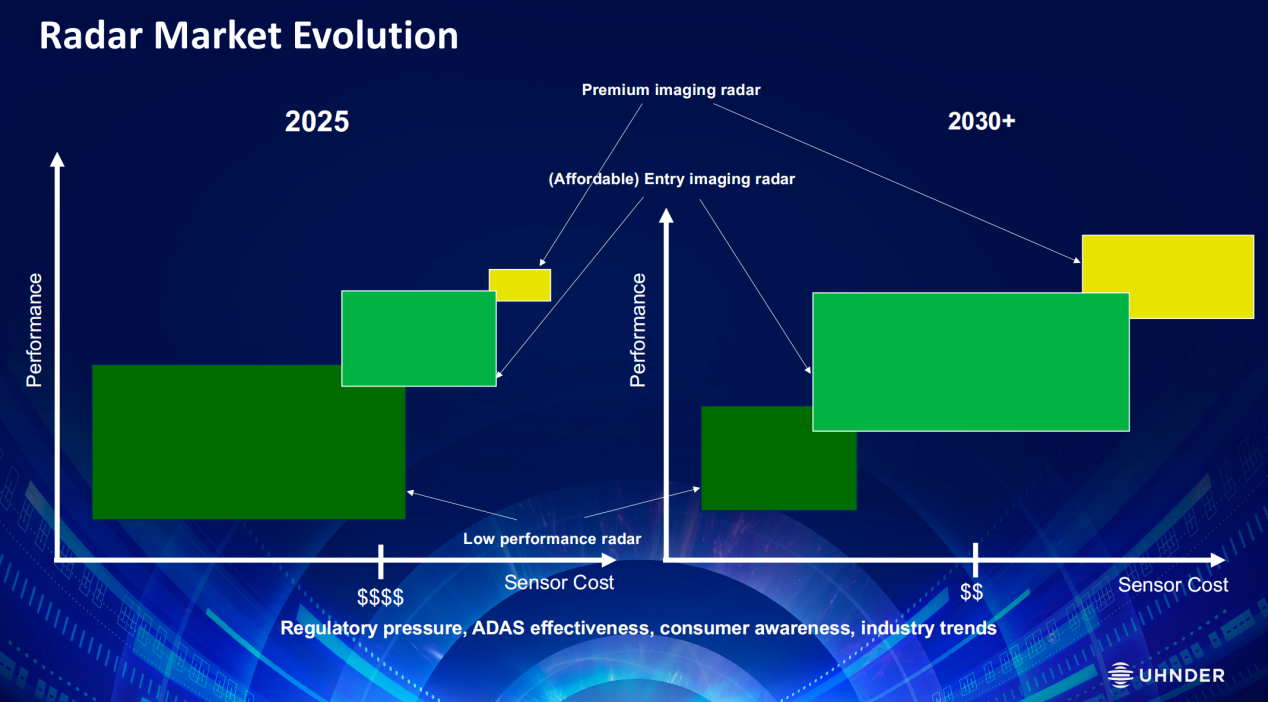
雷达市场解读
4D数字成像雷达如何融入现有方案
要兑现上述提到的市场潜力,那么现阶段我们就需要看到4D成像雷达对智能驾驶有什么价值?在这里面,Uhnder的4D数字成像雷达在实现智能驾驶方案时,又会展现出怎样的领先性。
首先是如何融入当前的自动驾驶方案中,目前L2级自动驾驶方案已经有一些固定方案,比如5V5R、6V5R或者11V5R等。对于这套体系,Manju Hegde表示:“Uhnder的4D数字成像雷达基本可以实现无缝对接Tier1和整车厂OEM的现有方案,其部署和传统模拟雷达是一样的。友商可能仅为Tier1和整车厂OEM提供一个设计参考平台,没有任何软件支持。但我们会提供经过 SPICE 认证的软件设计支持,软件团队是我们公司非常重要的组成部分,我们还会提供API,方便Tier1和整车厂OEM在雷达上部署他们的算法。”
“Uhnder的4D数字成像雷达在架构设计上有自己的独特之处,我们的芯片内嵌信号处理设计,因此不需要额外的处理器加持。友商想要达到相同的性能水平需要5颗芯片:4 颗FMCW芯片+1颗FPGA芯片或特殊的雷达处理器。因此我们的性价比是明显优于竞品的,为智能安全驾驶带来更高性能的同时实现降本增效。”Manju Hegde提到。
Uhnder 4D数字成像雷达和竞品对比
在现有自动驾驶方案中,还有一颗关键器件——激光雷达,关于激光雷达和4D成像雷达的争论已经持续了很久。对此,Manju Hegde认为:“激光雷达和雷达之间的关系是很微妙的,激光雷达在光频率方面比较有优势,高性能激光雷达可以获得微米级的分辨率,虽然汽车可能用不到这么高的分辨率。从商业化、汽车安全性和性价比角度出发,雷达可能还是要更胜一筹。”
不过,他也指出,激光雷达和4D成像雷达的争论基本是在L2级自动驾驶阶段,到了L3级自动驾驶将会开始融合,到L4级及以上时就会成为合作互补的方案。
此次活动上,Uhnder展示了领先的 4D 数字成像雷达解决方案在高级驾驶辅助系统(ADAS)领域的最新发展和应用,并分享了与合作伙伴共同开发的 ICON 雷达(已量产)、奥迪 MARS 样机、原型机及评估套件等。
结语
从3D雷达到 4D 数字成像雷达,产品技术不断进化让雷达在自动驾驶领域拥有广阔的发展前景。现阶段,4D 数字成像雷达依然是一项比较新的技术,但Uhnder的方案加速了4D 数字成像雷达上车的进程。目前,国内已经开始L3级和L4级自动驾驶试点,随着高阶自动驾驶时代到来,4D 数字成像雷达拥有巨大的发展潜力。作为这个领域的领先玩家,Uhnder也会大受裨益。
-
智能驾驶
+关注
关注
5文章
3073浏览量
51443
发布评论请先 登录
4D成像雷达是如何成像的?哪些车企使用了?

安富利基于英飞凌CTRX8188F芯片推出4D成像雷达解决方案

4D毫米波雷达成为L3级自动驾驶的感知基石
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

4D毫米波雷达为什么称为激光雷达的“替身”?
使用单芯片 8 x 8 级联收发器实现 4D 雷达成像
全球体积最小4D FMCW激光雷达亮相!

CTLRR-540毫米波雷达4D成像应用测试(一)

自动驾驶中4D毫米波雷达在雨雾中更具优势吗?

单芯片8T8R,全国产“4D卫星架构雷达”来了
4D毫米波雷达比3D毫米波雷达到底强在哪儿?

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践




评论