 补盲激光雷达,照亮自动驾驶隐秘的角落
补盲激光雷达,照亮自动驾驶隐秘的角落

近日,“一位清洁工躺地下车库通道午睡被碾身亡,司机被羁押366天后被判无罪,获赔21万”的新闻上了各大热搜,中间责任判定自有专业部门进行,但是事故发生时的场景引发了笔者的思考。 图1所示是事故发生时的视频截图,从图1可见,红圈位置处于司机的视野盲区中,司机是无法发现红圈位置有一个躺着午睡的人的。那么问题来了,如果车辆此时激活的是L4代客泊车功能,正在由系统控制车辆通过车库入口,那么自动驾驶系统此时能避免吗。
基于代客泊车当前主流的传感器配置,笔者的结论是:无法避免。 一个躺着的人离地也就20cm左右,在上述场景下,无论是激光雷达还是相机还是毫米波雷达由于本身盲区及视场角限制都无法探测到红圈处躺着的人。那么当下或未来有没有一种传感器,可以应对这种场景? 不仅有而且已经有不少厂家在尝试装车,这个传感器就是叫好不叫座的补盲激光雷达。
车载激光雷达在2022年迎来了量产上车的大年,一众新势力主机厂在新车型上装配激光雷达后,各大传统主机厂也开始纷纷跟上脚步。但中长距激光雷达已经卷不出新意后,大家纷纷把目光投到了下一个领域—补盲激光雷达。
为何大家会觉得补盲激光雷达会是下一个可卷的领域呢?这就要从主机厂们卷激光雷达的数量开始说起,为了实现全车360°视场角全覆盖,尽可能的实现传感器视野盲区,主机厂们在一些旗舰车型上堆了好几颗激光雷达。小鹏G9有2颗,极狐阿尔法s华为HI版方案用了3颗,长城机甲龙堆了4颗。 4颗激光雷达的车型可以完全覆盖车辆前、后、左、右四个方向,而3颗激光雷达的布置舍弃了后向,1颗或者2颗激光雷达的车型都将雷达布置在前向,但2颗激光雷达车型前向左右两侧的视场角要比1颗激光雷达的会更大一点。
这么一看,激光雷达这玩意儿多多益善呀,但是激光雷达这个东西贵呀,从自驾系统硬件成本上来测算,除了域控,第二贵的就属激光雷达了。而且激光雷达的增加会让域控处理的感知信息量大幅增加,随之芯片成本和闪存存储器(Univeral Flash Storage, UFS)成本也大幅增加,最终反应到车辆价格上就会导致产品竞争力下降。
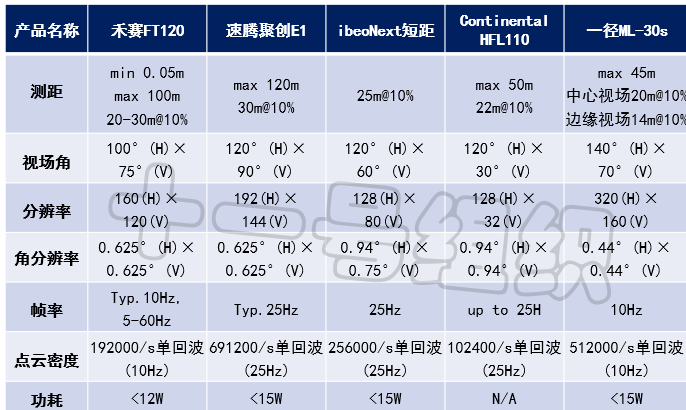
其次,主激光雷达的技术规格侧重远距离,垂直视场角只有25°~30°,对于补盲所希望的大视场角有所不同,用起来不顺手。因此,在预研规划下一代自动驾驶硬件方案时,主机厂和供应商都会严肃考虑补盲激光雷达的产品定位。成本更低但是性能够用的补盲激光雷达成了一个很好的选择,补盲激光雷达主要布置在侧向位置,最小外露视窗尺寸小,探测能力100m左右,视场为100°*75°广角,高可感知路牌、栏杆、立体车库夹层,低可探测孩童、宠物、锥桶、斑马线等。 如下表1所示,是目前市场上主流的补盲激光雷达的参数。
表1 主流补盲激光雷达参数对比
下面笔者以速腾聚创E1为例,详细阐述一下补盲激光雷达的作用,建立起大家对补盲激光雷达的一个基本概念。 速腾聚创E1采用940nm激光波段,激光人眼安全等级为最高的Class 1 Eye Safety,属于安全型激光,在正常使用条件不会对行人的健康带来危害。视场角为120°×90°,角分辨率为H×V:0.625°×0.625°,帧率为可配置的10~30Hz。
在100klux光照,10%反射率条件下,其探测距离为30m,检测盲区低于0.1m,测距精度为±5cm(1 sigma)。功耗小于15W,重量低至300g,工作温度范围为(-40°C,85°C),防护等级为IP67,IP6K9K。 从表1可知,补盲激光雷达的水平视场角都很大,这就能支持最优部署方案,所谓最优部署方案,就是实现车辆360度无死角覆盖,没有盲区的存在。如图2所示的三种部署方案,2补盲1前向能保证最优部署方案,3补盲1前向和4补盲1前向已经能保证足够的感知冗余了。这种最优部署方案可以保证融合零盲区,提前发现对向来车,安全掉头。
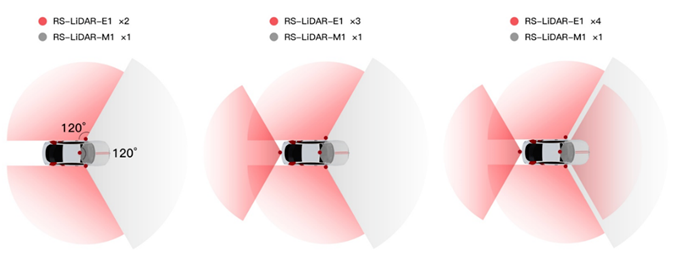
图2 激光雷达部署方案 从表1可知,补盲激光雷达的垂直视场角较前向激光雷达都大,大垂直视场角有什么好处呢?从图3的75°视场角和90°视场角比较可以看出,大垂直视场角能兼顾地面补盲与侧向大范围感知,有效降低盲区角度和盲区范围。从图4可知,补盲激光雷达能有效弥补现有自动驾驶硬件感知中的Corner Case。
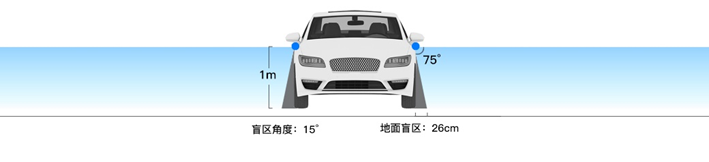
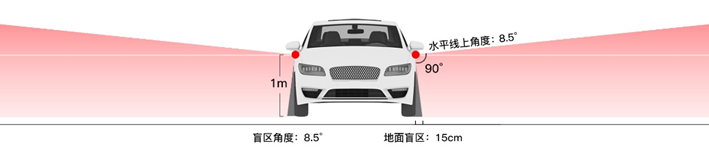
图3 75°垂直视场角 vs 90°垂直视场角
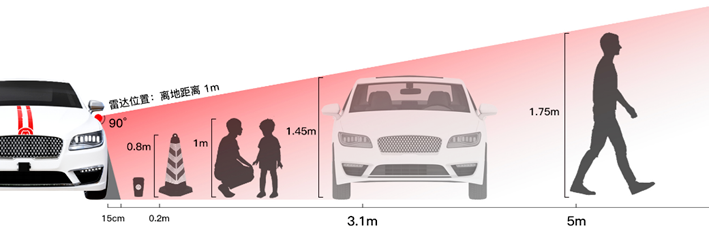
图4 补盲激光雷达感知物体 对于补盲激光雷达对自动驾驶功能的提升,笔者从泊车、高速和低速三个方面进行阐述。 从代客泊车功能的实现来看,补盲激光雷达的增加除了完美实现自车360无死角的覆盖之外,还可以精确可靠的感知碰撞边界,从而实现真正安全智能可靠的代客泊车功能。
从高速路自动驾驶功能来看,目前功能在面对较拥堵环境的cut-in/cut-off场景无法应对,自车在面对后车抢行、侧向空间不足时,无法进行安全变道,加装补盲激光雷达后,自车能有效增加侧向感知性能,从而优化变道算法,在较小空间内实现变道。
低速场景,主要是交通拥堵功能,通过两颗补盲激光雷达的360全视场角覆盖,可以解决侧向盲区和异形目标检测问题,弥补了前向激光雷达视场角以外区域的感知效果差异,能够有效应对加塞和变道,有效应对复杂的城区工况。尤其是在城区路口转弯、人车混行道路等场景下,由于交通参与者的构成比较复杂,补盲激光雷达能起到的作用更为显著。
总的来说,补盲激光雷达的部署可以提供更为丰富的点云数据,加强自动驾驶系统对周围目标进行精确的分类和识别,有助于自动驾驶系统更好地理解和预测其他交通参与者的行为和意图,从而及时识别潜在的危险和风险,并采取适当的措施来避免碰撞或者事故,增加自动驾驶功能的实用性。
审核编辑:刘清
-
传感器
+关注
关注
2578文章
55821浏览量
795462 -
处理器
+关注
关注
68文章
20380浏览量
255624 -
激光雷达
+关注
关注
983文章
4595浏览量
197408 -
闪存存储器
+关注
关注
0文章
21浏览量
9300 -
自动驾驶系统
+关注
关注
0文章
70浏览量
7346
原文标题:补盲激光雷达,照亮自动驾驶隐秘的角落
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为啥自动驾驶不使用1550纳米激光雷达?

自动驾驶中激光雷达搭载越多融合越困难吗?

自动驾驶激光雷达无法识别反光背心吗?
为啥有人认为自动驾驶纯视觉方案比激光雷达方案好?
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

L4无人驾驶全面升级,主雷达+补盲雷达缘何成为行业标配?

FMCW和ToF激光雷达,哪种更适合自动驾驶?
自动驾驶激光雷达会伤害人体吗?

如何为自动驾驶汽车选择一款合适的激光雷达?

自动驾驶里的激光雷达有何作用?

自动驾驶激光雷达可以安装在哪些位置?
决定自动驾驶激光雷达感知质量的因素有哪些?




评论