 焊接机器人的控制器、传动方式和驱动器
焊接机器人的控制器、传动方式和驱动器

控制器、传动机构和驱动系统是焊接机器人的核心组成部分,接下来工业机器人生产企业无锡金红鹰将为大家详细介绍。
控制器
控制器是焊接机器人的核心,它负责对焊接机器人的各项运动进行监控和控制,以及实现焊接程序的编写和执行。目前市场上常见的焊接机器人控制器主要分为以下几类:
1. 基于PC的控制器
基于PC的控制器,通常由一台主机和多台从机组成,在焊接任务中,主机为整个控制器提供所需的计算资源和运行算法,从机则负责处理机器人的各项运动指令。这种控制器的优点是处理能力强,可应对较复杂的焊接任务,但缺点是价格较高。
2. 嵌入式控制器
嵌入式控制器是一种内置于机器人控制器中的控制系统,它通常由一种或多种微处理器组成,可以很好地控制机器人的各项运动。这种控制器的优势是成本低,易于集成,但在处理能力和扩展性方面逊于基于PC的控制器。
数字信号处理器控制器是一种特殊的嵌入式控制器,其主要特点是拥有高速运算和高效能处理的数字信号处理器,可以在同一时间内控制多个机器人的运动,提高生产效率。但缺点是控制器价格较高。
传动方式
焊接机器人的传动方式通常由电机和减速器组成,电机负责提供动力,减速器则负责控制转速和扭矩。目前市场上常见的焊接机器人传动方式主要有以下几种:
1. 直接驱动
直接驱动是一种高效、精确的焊接机器人传动方式,它采用无齿轮的减速器,通过电机直接把动力传递到机械臂上,使得机器人在运动时更为平稳。但这种传动方式的缺点是成本较高,维修维护也较为困难。
2. 齿轮减速
齿轮减速是一种常见的焊接机器人传动方式,其主要特点是结构简单、稳定可靠,传动效率高。但这种传动方式的缺点是噪音和抖动较大,不够平稳。
3. 皮带传动
皮带传动是一种采用皮带将电机与减速器连接的焊接机器人传动方式,它能够有效地减少机器人的噪音与振动,实现更为平稳、安静的运动状态。但这种传动方式的缺点是传动效率不如齿轮减速。
驱动器是焊接机器人的控制系统与电机之间的接口,主要作用是将控制信号转换为电机的转速和转向。目前市场上通用的焊接机器人驱动器主要有以下几种:
1. 伺服驱动器
伺服驱动器是一种高精度、高性能的驱动器,其主要特点是可以根据电机的转子位置和运动速度进行精细控制,以实现更为精确的机器人运动。这种驱动器广泛应用于需要高精度焊接的行业,如汽车制造、电子生产等。
2. 步进驱动器
步进驱动器是一种采用数字控制技术的驱动器,它的优点在于稳定性高、响应快、组装简单、价格低廉,适用于不需要高精度焊接的行业。
3. 直流驱动器
直流驱动器是一种较为传统的驱动器,其主要特点是价格低廉,稳定性和可靠性也较高,但控制精度不如伺服驱动器。
审核编辑:汤梓红
-
驱动器
+关注
关注
54文章
9115浏览量
156510 -
控制器
+关注
关注
114文章
17877浏览量
195142 -
焊接机器人
+关注
关注
16文章
362浏览量
16012
发布评论请先 登录
基于BL350平台的焊接机器人智能控制与质量追溯解决方案
嵌入式计算机AF208:焊接机器人高效精准作业的核心引擎

激光焊接机在焊接助力器的工艺流程

激光焊接机在焊接高低压断路器的工艺流程

自动化焊接倍福CX系列PLC和焊接机器人通过协议转换网关进行通讯去控制DeviceNet从站设备案例

管道焊接项目中汇川PLC通过EtherNet/IP转EtherCAT模块与焊接机器人进行通讯解决方案

激光焊接机在焊接储液器的工艺流程

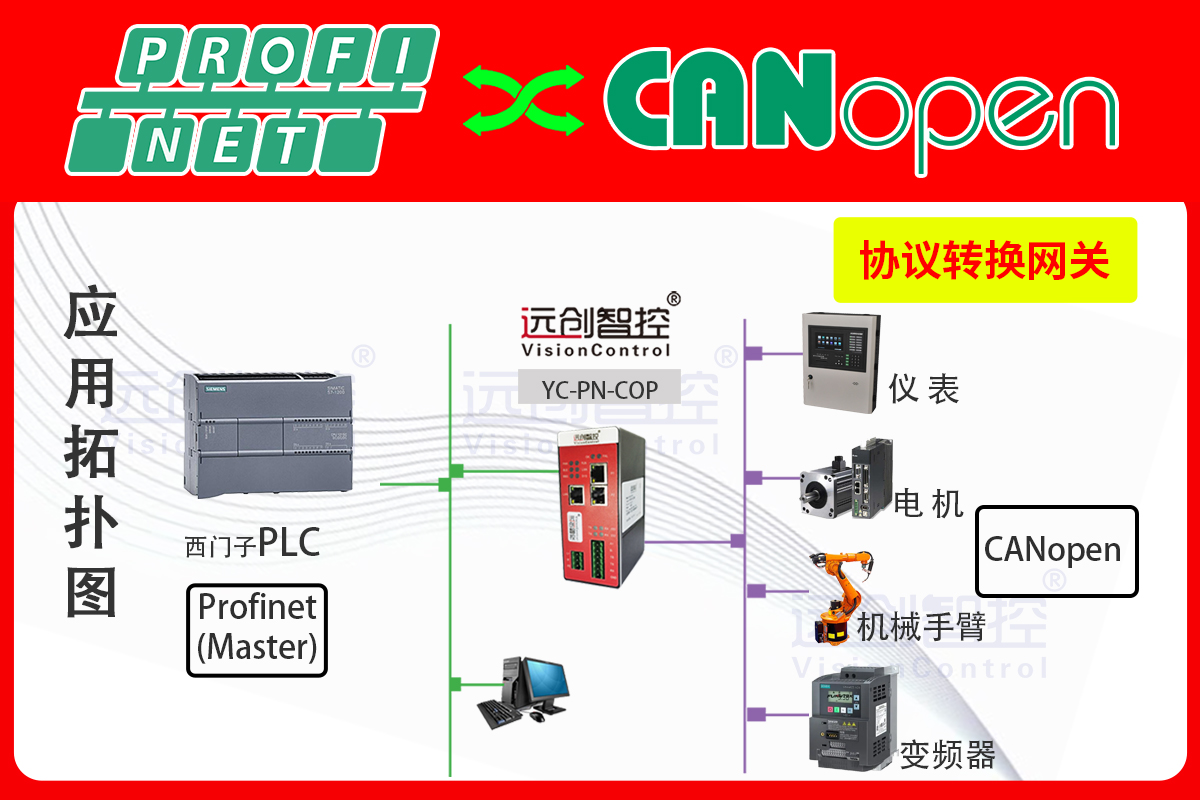
智能化机器人焊接产线西门子1500系列PLC通过Profinet转CANopen模块和多个伺服电机进行通讯案例

Profinet转CANopen智能网关:打通机器人焊接产线西门子PLC与伺服电机通讯壁垒
工业显示器在焊接机器人中的应用

人形机器人伺服电机驱动器新动力:高性能电容器的协同作用


机器人通信的贴身翻译,PROFINET转Ethercat网关的高能玩法



评论