 ChatGPT是如何用一首诗来刻画激光雷达优势
ChatGPT是如何用一首诗来刻画激光雷达优势

当近日爆火的ChatGPT遇到激光雷达会擦出怎样的火花?当全新的聊天机器人遇到科技领域会产生怎样的回答?ChatGPT是如何用一首诗来刻画激光雷达优势的,赶快往下看吧!
 图一:ChatGPT为激光雷达作诗诗中第一句:ChatGPT通过“夜半出行路遥远,激光雷达前行看”,形象地介绍了激光雷达“无惧黑夜”的优势。在完全黑暗的驾驶过程中,为智能驾驶汽车提供三维感知“视野”,为车辆获得更加全面而强大的感知能力,从而达到更加安全的目的。
图一:ChatGPT为激光雷达作诗诗中第一句:ChatGPT通过“夜半出行路遥远,激光雷达前行看”,形象地介绍了激光雷达“无惧黑夜”的优势。在完全黑暗的驾驶过程中,为智能驾驶汽车提供三维感知“视野”,为车辆获得更加全面而强大的感知能力,从而达到更加安全的目的。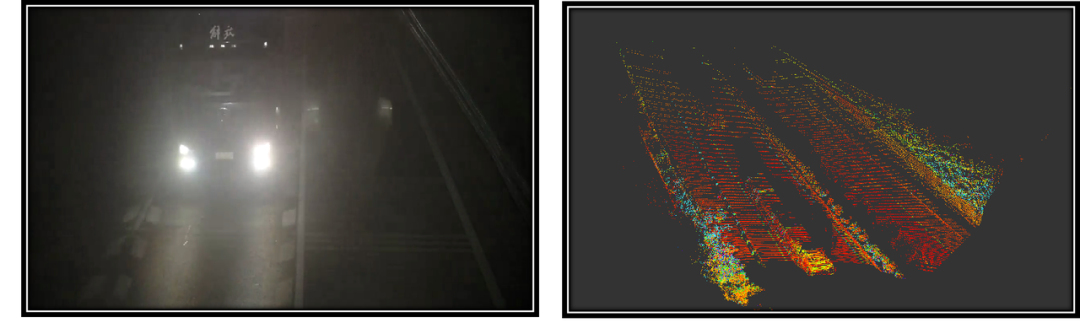
 图二:车辆在黑夜行驶图片(摄像头左 激光雷达右)诗中第三、四句:ChatGPT提到“千山万水足预示,一点一景令人扬”,“它的预知世界内,一切障碍显无穷”很好的诠释了在激光雷达对远距离目标物探测的优势,让智能汽车在行驶过程中提前“看到”潜在危险,对于一个小目标物或者一个Corner Case,都能够有很好的被检出并利于算法进行识别,在感知层面上为智能驾驶用户留出足够的观察与响应时间。
图二:车辆在黑夜行驶图片(摄像头左 激光雷达右)诗中第三、四句:ChatGPT提到“千山万水足预示,一点一景令人扬”,“它的预知世界内,一切障碍显无穷”很好的诠释了在激光雷达对远距离目标物探测的优势,让智能汽车在行驶过程中提前“看到”潜在危险,对于一个小目标物或者一个Corner Case,都能够有很好的被检出并利于算法进行识别,在感知层面上为智能驾驶用户留出足够的观察与响应时间。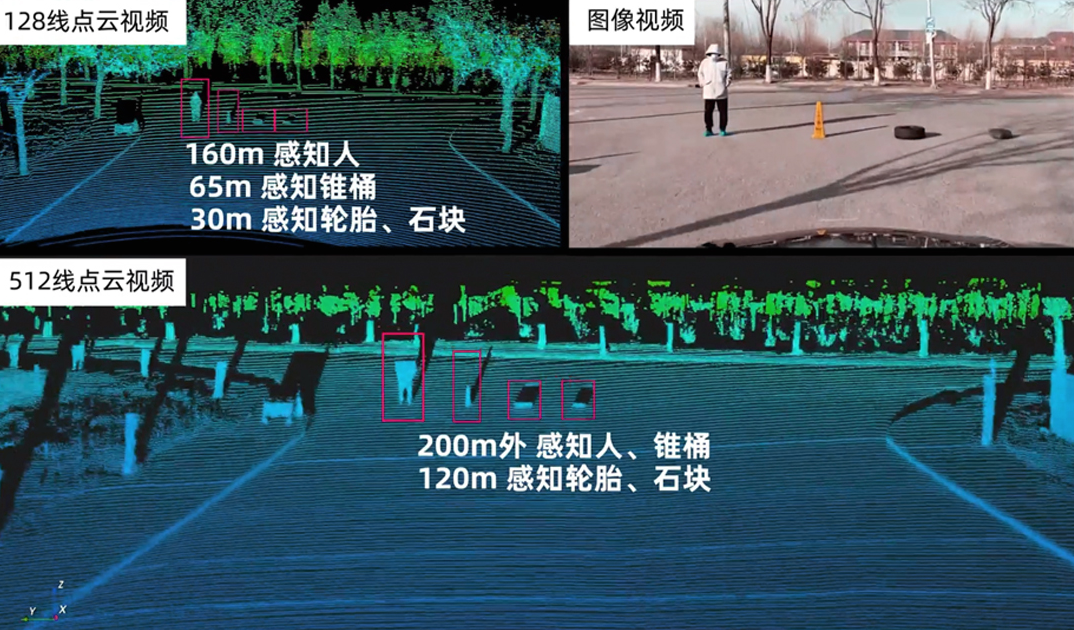 图三:北醒路测真实数据诗中最后一句:ChatGPT这样夸赞激光雷达“其精确稳如磐石,它的智慧令人钦服”。激光雷达作为ADAS(高级辅助驾驶)和AD(自动驾驶)的核心传感器,其关键优势是对关注区域内的目标物的主动的、精确的探测。
图三:北醒路测真实数据诗中最后一句:ChatGPT这样夸赞激光雷达“其精确稳如磐石,它的智慧令人钦服”。激光雷达作为ADAS(高级辅助驾驶)和AD(自动驾驶)的核心传感器,其关键优势是对关注区域内的目标物的主动的、精确的探测。
为了打造更加安全的智能驾驶能力,北醒从车企的需求出发,通过更高的分辨率来提高小目标的有效测距量程。以满足实际应用的算法感知需要对类似行人、锥桶等关键小目标期望在100m探测距离以上的需求(以最高限速120km/h计)。
此前北醒发布的AD2全新一代车规级激光雷达,拥有优异的小目标探测能力,汽车在100km/h行驶过程中,相较于128线激光雷达可以提前2秒探测到22cm(类似平放轮胎)小型障碍物,选择提前减速稳妥停下,无需采取紧急刹车的极限操作,或者在有机会安全平稳地切换到其他的行车道,绕开障碍物继续行驶,从根本上避免事故的发生。AD2在整个120°水平视场范围内各个角度与区域都具备高分辨率,且整个视角内的高分辨率是连贯且平滑的,没有重叠、交错、缝隙等现象,使得激光雷达无需左顾右盼,更加方便地兼顾更大范围内的目标检出,为降低事故发生提供了双重保护,为司机的安全保驾护航。AD2的另一个革命性突破,是实现了性能与成本的解耦合,通过自研的双轴高精扫描技术和双电机控制算法,搭配阵列收发技术,在同参数性能之下可以使用更少的收发阵列,以大幅度降低成本,在技术性能延展性方面不会大幅受到成本的约束,完美兼顾了车企对成本和性能的高标准需求。 图四:北醒自研高精2D扫描技术未来,北醒将努力让激光雷达更上一层楼,如同ChatGPT诗中所提到的“其精确稳如磐石,它的智慧令人钦服”,为驾驶的安全带来质的提升,真正让每一个人都能获得安全的智能驾驶能力。
图四:北醒自研高精2D扫描技术未来,北醒将努力让激光雷达更上一层楼,如同ChatGPT诗中所提到的“其精确稳如磐石,它的智慧令人钦服”,为驾驶的安全带来质的提升,真正让每一个人都能获得安全的智能驾驶能力。
关于北醒
北醒(北京)光子科技有限公司(Benewake (Beijing) Co., Ltd)于2015年成立于中国北京,致力于为用户提供激光雷达及解决方案,实现安全智能行驶和自动化升级。北醒通过激光雷达技术为自动驾驶及车路协同、轨道交通、民航、航运、工业传感等领域实现行业转型。截止目前,北醒已获得专利百余项,员工超过200名,在全国拥有集研发、生产、销售和工程服务全方位的业务活动。北醒自主研发的高性能激光雷达,获得了国内外500强企业的青睐,业务遍布全球90多个国家和地区,产品出口到欧美、亚太等区域。
-
激光雷达
+关注
关注
982文章
4548浏览量
197100 -
ChatGPT
+关注
关注
31文章
1600浏览量
10393
发布评论请先 登录
固态激光雷达参数以及避障视频
禾赛科技ATX激光雷达获得一汽奔腾新一代车型定点
禾赛科技位列全球激光雷达行业专利第一

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

如何为自动驾驶汽车选择一款合适的激光雷达?

禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?

华为,激光雷达第一! 车载激光雷达市场的“隐形冠军”

自动驾驶里的激光雷达有何作用?

禾赛科技再获美国Motional激光雷达订单

思岚发布首个消费级水下激光雷达品类-RPLIDAR U1

FMCW激光雷达,加速落地工业场景
SPAD席卷车载激光雷达市场
激光雷达在自动驾驶领域中的优势




评论