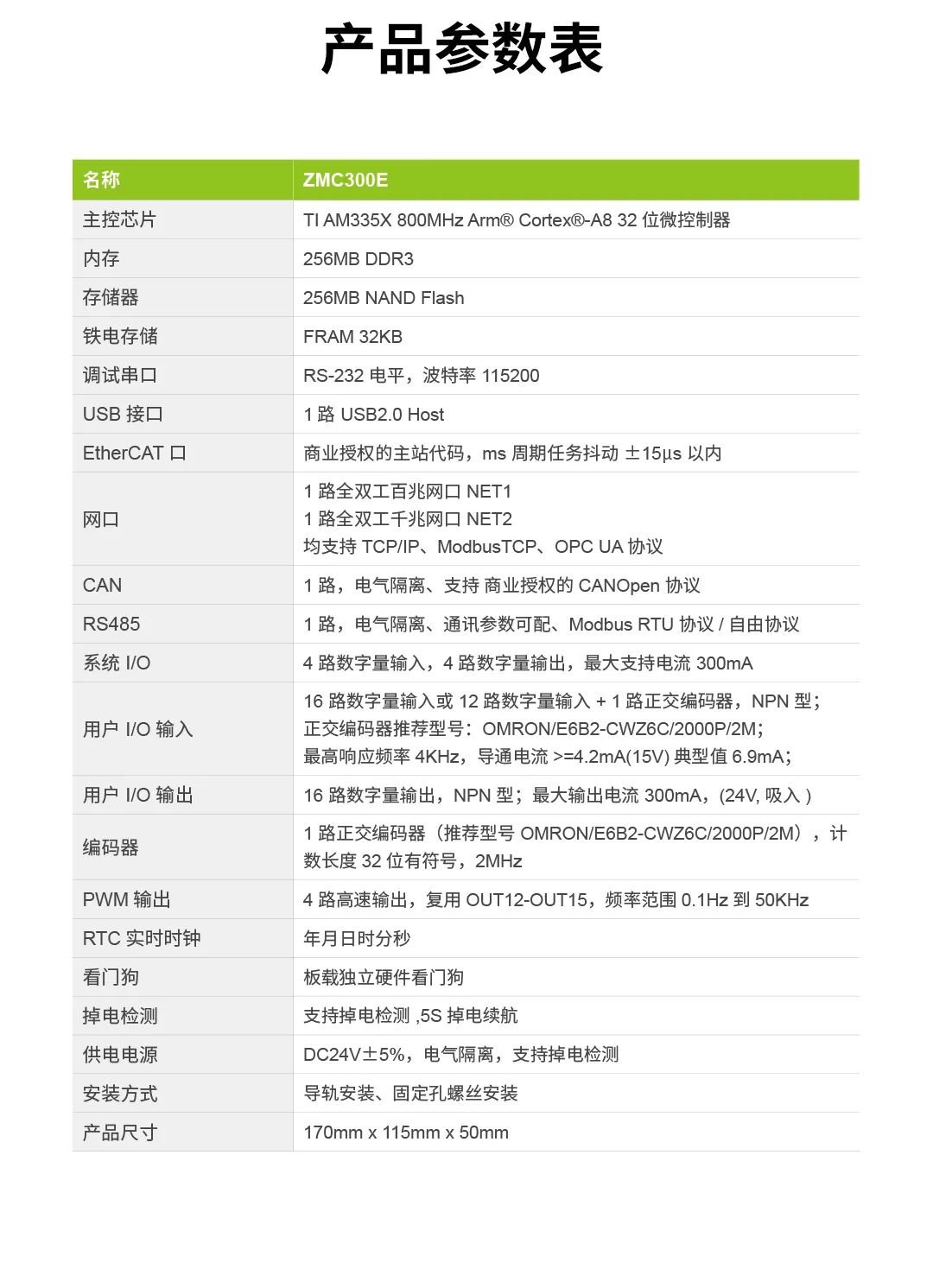
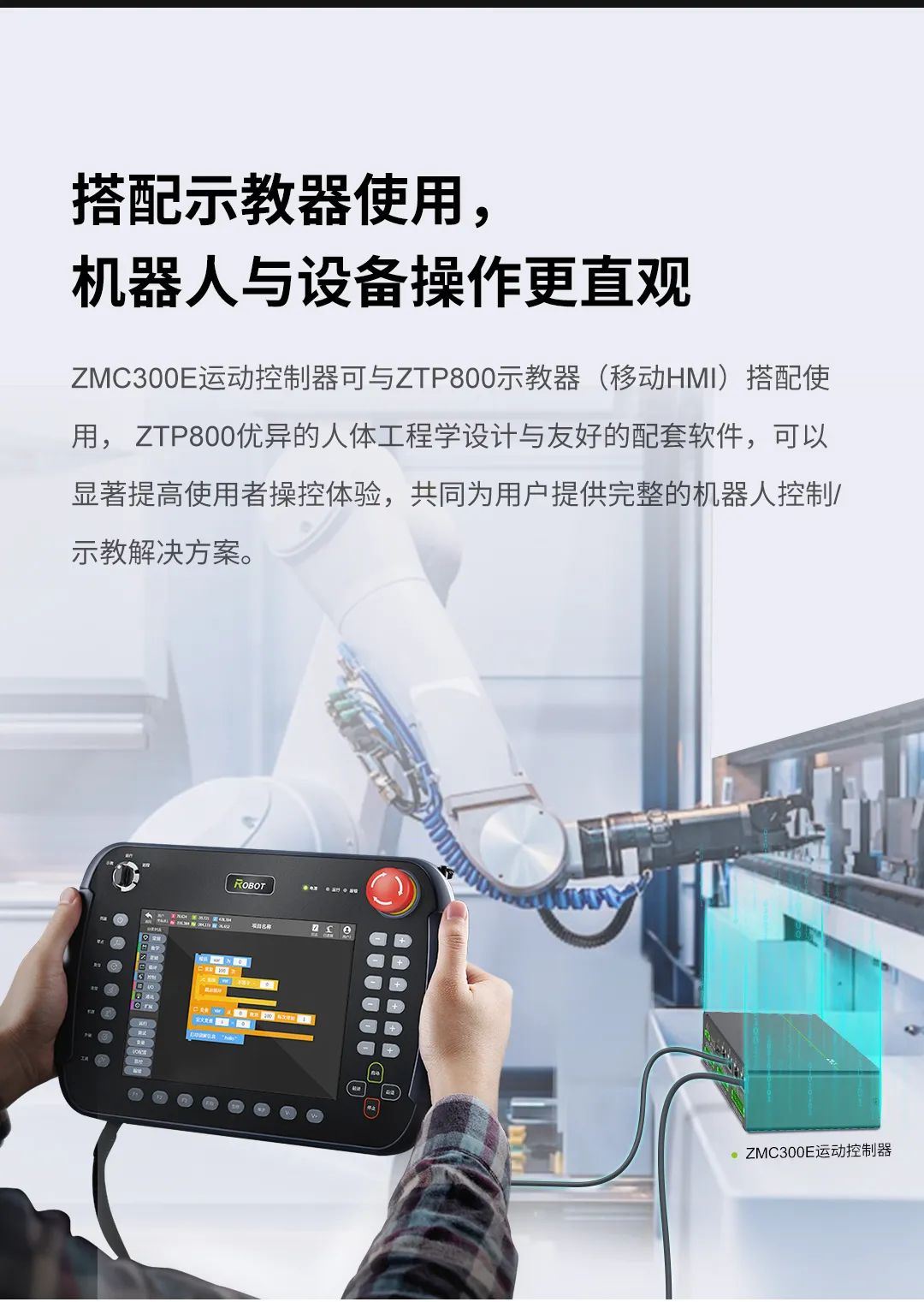
 【新品发布】ZMC300E运动控制器,为满足机器人应用控制而生
【新品发布】ZMC300E运动控制器,为满足机器人应用控制而生




声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17874浏览量
195072 -
机器人
+关注
关注
213文章
31432浏览量
223601
发布评论请先 登录
相关推荐
热点推荐
ZMC900E运动控制器单路EtherCAT主站125μs性能实测:硬核实力筑牢高精度控制基石
工业自动化高精度运动控制中,EtherCAT实时性决定设备精度与产线效率,125μs通信周期是关键指标。ZMC900E单路EtherCAT主站经8天老化测试,验证其高性能工业场景的可靠适配性。背景在

CES2026:先楫半导体隆重推出HPM5E3Y,打造机器人运动控制芯片阵容
新纪元。作为高性能微控制器产品及嵌入式解决方案提供商,上海先楫半导体科技有限公司 (先楫半导体,HPMicro) 紧跟全球科技创新浪潮,在展会现场重磅发布全新一代高性能以太网总线运动控制

具身机器人走得稳不稳?它可以说了算!
视频推荐EtherCAT总线的PDO指令是具身机器人实现高精度、高协调性运动控制的关键技术支撑,直接反馈运动状态,致远电子EtherCAT-Analyzer能精准检测主从站PDO周期,

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
的机器人控制系统,例如米尔的 MYD-LT536 开发板。
二、MYD-LT536:为机器人控制系统而
发表于 11-14 15:48
MCU微控制器,N32H47x高性能MCU机器人关节控制方案
在工业自动化领域,关节作为机器人的核心运动部件,其控制精度直接决定了整机性能。英尚微电子基于国民技术MCU微控制器N32H47x系列,推出创新机器人
深入ZMC900E:主站控制器编码器的使用与优势
视频推荐在工业自动化领域,编码器是确保设备精准运行的关键部件。本期我们将深入探讨ZMC900E主站控制器中的编码器功能。编码器编码
解锁PWM功能:ZMC900E主站控制器的高效应用指南
在当今的自动化控制领域,ZMC900E主站控制器凭借其卓越的性能和丰富的功能,成为了众多工程师和项目开发者的首选。今天,我们重点探讨一下ZMC900E主站
突破人形机器人控制器性能瓶颈:高效稳定的电容器解决方案
在人形机器人的精密世界中,每一个微小的部件都承担着重要的角色。控制器,作为机器人的“大脑”,其稳定性和可靠性对于整个系统的性能至关重要。控制器不仅需要处理复杂的算法和信号,还要精确地指

探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器
ZLG致远电子的ZMC系列EtherCAT主站控制器,凭借多元内核、丰富接口、卓越通信能力及开放开发环境,为工业自动化提供全方位解决方案,助力企业智能化升级。前言在工业自动化领域不断演进的今天,可靠
【一分钟教程】用ZMC600E实现关节机器人±180度精准转动
又是如何精准而实时的控制它们的“手脚”,从而完成各种高难度动作的?今天我们就用ZLG致远电子的ZMC600E做一个控制机器人运动的例程,实现
海默RC系列机器人控制器
,基于自主研发技术打造,致力于推动机器人核心技术的持续突破。RC系列控制器/HMControllerSeriesRC80控制器RC40控制器为

MT6701磁编芯片:开创机器人运动控制新时代
在科技的浩瀚星空中,机器人领域无疑是一颗璀璨的明星。而在机器人的关键技术中,运动控制宛如机器人的“神经系统”,直接影响着
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:
发表于 04-27 11:24
基于先进MCU的机器人运动控制系统设计:理论、实践与前沿技术
AS32A601为例,全面阐述其在机器人运动控制领域的卓越性能与广泛应用前景,旨在为机器人技术在多领域的深化发展提供有力支撑。 关键词 :M



评论