 ZMC900E运动控制器单路EtherCAT主站125μs性能实测:硬核实力筑牢高精度控制基石
ZMC900E运动控制器单路EtherCAT主站125μs性能实测:硬核实力筑牢高精度控制基石

工业自动化高精度运动控制中,EtherCAT实时性决定设备精度与产线效率,125μs通信周期是关键指标。ZMC900E单路EtherCAT主站经8天老化测试,验证其高性能工业场景的可靠适配性。
 背景
背景
在工业自动化高精度运动控制场景中,EtherCAT 总线的实时性、稳定性直接决定设备控制精度与产线运行效率,125μs(8KHz)高频通信周期更是检验控制器性能的核心指标。ZMC900E 运动控制器作为工业级控制核心,其单路 EtherCAT 主站在高频周期下的表现备受关注。本文基于 ZMC900E 单路主站 125μs 周期的8天全维度老化测试,从数据传输、设备控制、资源占用等多维度解析其性能表现,验证其在高性能工业控制场景的适配性与可靠性。 测试核心目标与环境搭建
本次测试以验证 ZMC900E 运动控制器单路 EtherCAT 主站在 125μs 高频通信周期下的稳定性、实时性、数据完整性为核心,通过8天不间断老化测试,检验主站在多从站挂载、高频数据交互、持续设备控制场景下的表现,确认其是否满足数控机床、工业机器人、精密自动化产线等高性能控制需求。

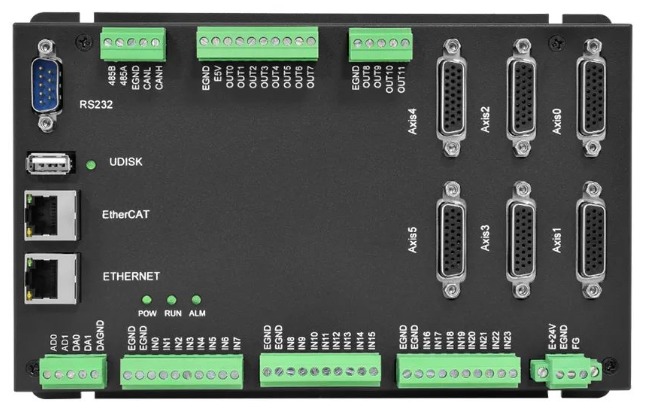
图1 接线框图
测试硬件采用 ZMC900E 控制器作为核心,单路主站挂载 28 台工业级 EtherCAT 从站设备,涵盖 DI/DO 设备(ZIOC-E1600DN、ZDM-E0016N 等)、多品牌伺服驱动器(松下、汇川 、台达等),辅以 EtherCAT 专用分析仪、24V 工业电源、工业级网线构建标准测试拓扑;软件层面依托 AWStudio 上位机完成网络配置、实时监控与数据采集,NetAnalyzer 分析仪实现 PDO 帧过滤与抖动统计,定制化测试程序支持伺服 CSP 模式运动控制、DI/DO 硬件对接读写测试,全程开启从站分布式时钟(DC)同步功能,贴合工业现场实际应用场景。

图2 NetAnalyzer分析仪工具设置
使用上位机工具连接到设备,正确扫描出28个从站设备,确认PDO数据大小,周期时间设置125us,并将支持DC模式的从站全部打开,如下图3和4所示。

图3 上位机工具配置

图4使能从站DC
上位机工具配置后相关功能后,导出网络配置eni.xml文件,最后在测试程序调用执行,程序切换状态和运行均正常,如下图所示。

图5 执行测试程序 全维度测试结果:高频下的稳定与精准
本次测试围绕数据传输完整性、PDO 帧与回调函数实时性、主从站通信状态、设备控制有效性、CPU 资源占用五大核心维度开展,历经 8 天不间断运行,各项指标均达到工业级高性能控制标准,核心表现如下:
1. 数据传输:零丢包零错包,指令传输绝对可靠
125μs 周期下,主站通信数据输出 281 字节、输入 97 字节,经上位机全程统计,总丢包数量显示为 1(系上位机显示延迟,非实际丢包),实际丢包率、错包率均为 0.00%,无帧校验错误、非字节对齐等通信异常。主站负载率仅 22.99%,带宽余量充足,可充分保障工业现场控制指令与采集数据的高速、可靠传输,从源头避免因数据丢失导致的设备控制失误。

图6 数据丢包情况
2. 实时性:微秒级抖动,满足高精度多轴同步
实时性是高频运动控制的核心要求,本次测试重点监控 PDO 帧发送周期与应用回调函数周期两大关键指标,均实现微秒级低抖动,远超工业控制常规要求:2.1 PDO 帧周期抖动经分析仪实测,帧间隔最小 118.195μs、最大 130.957μs,抖动范围仅 ±6.805μs,且绝大多数抖动分布在 512ns~2μs 区间,帧传输一致性极佳,为高频数据交互提供稳定保障。

图7 数据帧抖动情况
2.2 回调函数周期抖动
平均周期稳定在 125μs,最小 117μs、最大 133μs,抖动范围 ±8μs,稳定的回调触发周期确保伺服轨迹规划、多轴同步运动的精准执行,有效避免因周期波动导致的控制精度偏差。

图8 回调函数触发情况
3.通信状态:全程无异常,协议栈运行成熟稳定
8 天老化测试中,ZMC900E 主站与 28 台从站始终保持正常操作状态,AL/DL 寄存器状态无任何异常,未产生一条 EtherCAT 错误日志,主从站通信无中断、无卡顿。分布式时钟同步功能全程稳定生效,各从站设备时钟偏差控制在极小范围,充分验证了 ZMC900E EtherCAT 协议栈的成熟度与稳定性,可适应工业现场长时间不间断运行需求。

图9 EtherCAT通信状态情况

图10 主站错误日志情况
4.设备控制:伺服与 IO 精准响应,多设备协同高效
设备控制有效性直接反映控制器的实际应用能力,本次测试中,伺服设备与 IO 设备均实现精准、无延迟响应:

图11 I/O设备控制
4.1 伺服控制
7 台多品牌伺服驱动器在 CSP 模式下,按预定目标位置(±50000000)及速度匀速往返运动,全程无错误码,实际位置与目标位置偏差极小,运动控制流畅精准,多伺服协同运行无卡顿。

图12 伺服设备运行状态
4.2 IO 控制
DI/DO 设备硬件对接测试中,控制 DO 设备 8 路输出为高,对应 DI 设备前 8 路输入同步置位,数据交互一致性 100%,读写响应无延迟,满足工业现场开关量信号的高速采集与控制需求。
5. 资源占用:CPU 负载低,预留充足开发余量
控制器系统资源占用直接影响二次开发与多任务运行能力,125μs 高频周期下,ZMC900E 主站协议栈运行后,CPU 使用率仅 27%,无系统卡顿风险。剩余大量系统资源可供用户二次开发、多业务程序并行运行,无需担心协议栈运行占用过多资源影响控制程序执行,具备良好的扩展性与适配性。

图13 CPU使用率 测试结论与工程应用价值
本次针对 ZMC900E 运动控制器单路 EtherCAT 主站 125μs 周期的 8 天全维度老化测试,充分验证了其在高频通信、多从站挂载、长时间连续运行场景下的优异性能,核心结论如下:
- 高频通信稳定可靠:125μs(8KHz)高频周期下可实现 8 天不间断稳定运行,零丢包零错包,PDO 帧与回调函数均为微秒级低抖动,完全满足高精度、高同步的工业运动控制需求;
- 多设备兼容适配:完美兼容松下、汇川、台达等多品牌伺服驱动器及 ZIOC/ZDM 系列 IO 设备,协议兼容性强,降低工业现场设备选型与组网难度;
- 资源占用合理可控:CPU 负载率低,预留充足二次开发余量,支持用户个性化程序开发,适配复杂工业控制场景的多任务运行需求;
- 工业级耐用性优异:可适应工业现场长时间不间断运行,主从站通信全程无异常,设备控制精准有效,具备高可靠性与高耐用性。
从工程应用角度来看,ZMC900E 运动控制器单路 EtherCAT 主站的高性能表现,使其成为数控机床、工业机器人、精密自动化产线、电子制造设备等高精度运动控制场景的理想选择。125μs 高频通信能力可满足多轴高速同步、精密轨迹规划的核心需求,多品牌设备兼容性与低资源占用特性,为系统集成商提供了灵活的组网方案与开发空间,助力工业自动化产线实现更高精度、更高效率、更稳定的运行。 技术总结
EtherCAT 总线的高频稳定运行,是运动控制器硬件设计、协议栈优化、系统资源分配的综合体现。ZMC900E 运动控制器通过成熟的 EtherCAT 协议栈设计、高效的硬件资源调度、精准的时钟同步控制,实现了单路主站 125μs 高频周期下的微秒级抖动、零丢包传输与长时间稳定运行,各项性能指标均达到工业级高标准。在智能制造向精细化、高精度发展的趋势下,ZMC900E 运动控制器为工业自动化领域的高性能控制场景提供了可靠的硬件支撑,不仅能满足现有精密设备的控制需求,也为未来更高精度、更多轴的协同控制场景预留了扩展空间,助力推动智能制造技术的落地与升级。
-
运动控制器
+关注
关注
2文章
491浏览量
26139 -
工业自动化
+关注
关注
17文章
3227浏览量
70048 -
ethercat
+关注
关注
20文章
1573浏览量
46041
发布评论请先 登录
【深度解析】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用

【新品发布】ZMC600E EtherCAT主站控制器全新上市

EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制


ZMC600E运动控制器T型、S型速度规划详解
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器
ZMC900E如何实现多主站协同控制?
解锁PWM功能:ZMC900E主站控制器的高效应用指南
深入ZMC900E:主站控制器编码器的使用与优势



评论