 具身机器人走得稳不稳?它可以说了算!
具身机器人走得稳不稳?它可以说了算!

EtherCAT总线的PDO指令是具身机器人实现高精度、高协调性运动控制的关键技术支撑,直接反馈运动状态,致远电子EtherCAT-Analyzer能精准检测主从站PDO周期,确保机器人走得对走得稳!
 实测环境
实测环境
- 拓扑:ZMC600E主站连接TI双从站,模拟具身机器人主从节点状态,使用EtherCAT-Analyzer分析仪分析数据。
- pc:运行ZMC主站软件AWStudio、EtherCAT-Analyzer分析仪软件NetAnalyzer、Wireshark等。
- ZMC600E:主站,控制TI双EtherCAT从站,发布PDO指令等。
- TI从站:模拟具身机器人从站执行单元。
- EtherCAT-Analyzer:监听分析主从站通讯数据。
ZMC600E主站周期发布PDO
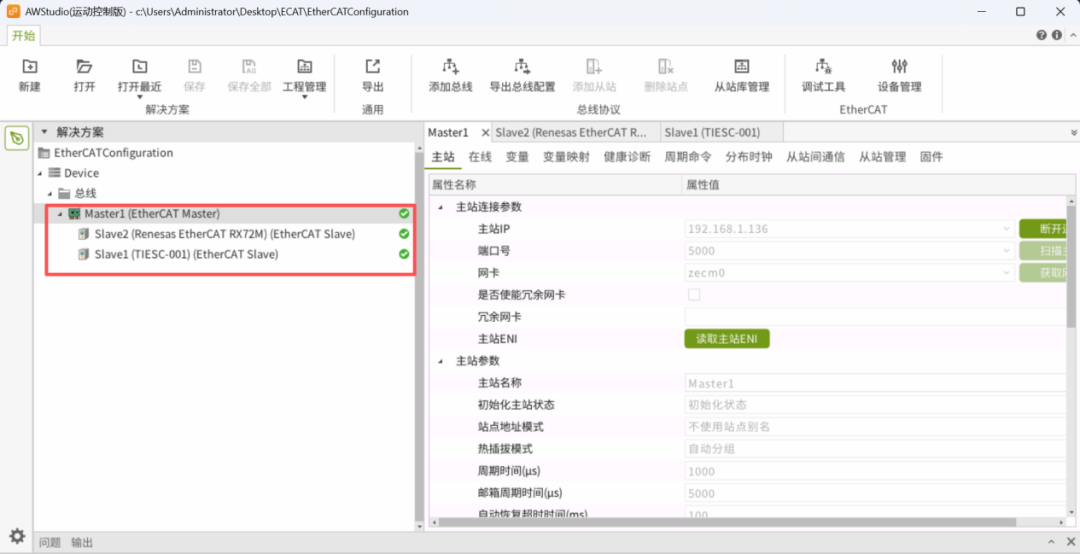
通过AWStudio主站管理软件,ZMC600E拓扑扫描连接TI双EtherCAT从站,安装ESI从站数据库,建立连接,周期输出PDO指令,从站执行单元回复。
1. ZMC600E拓扑扫描连接TI双EtherCAT从站,安装ESI从站数据库,建立连接。
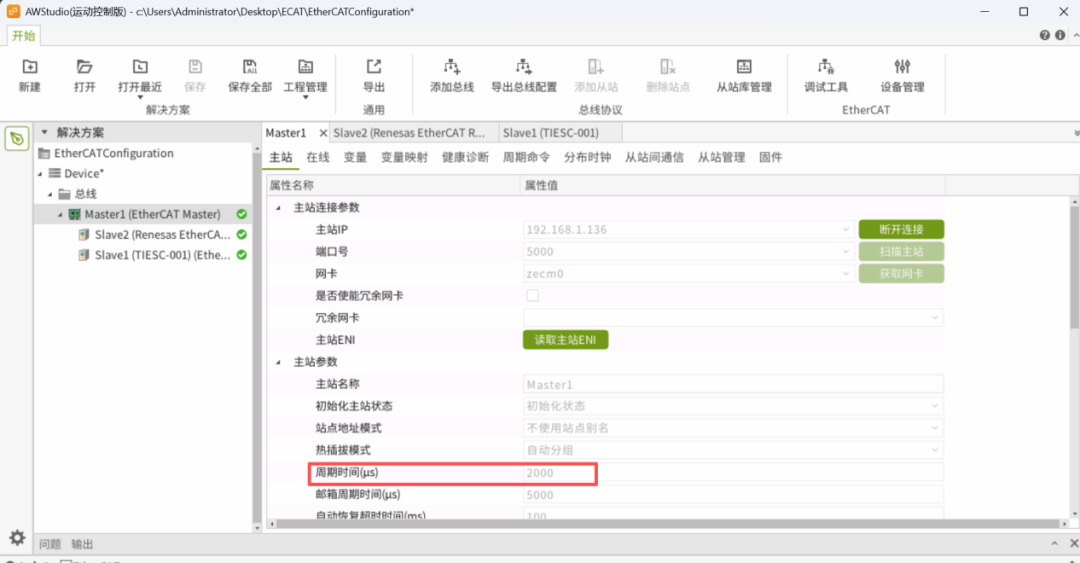
2. 主从站进入“操作状态”,2000us周期分别向Slave1 RxPD0-Map.0utputCounter输出PDO指令和Slave2 RxPDO-Map.0utput Data输出PDO指令。
2.1 操作状态

2.2 2000us周期输出RPDO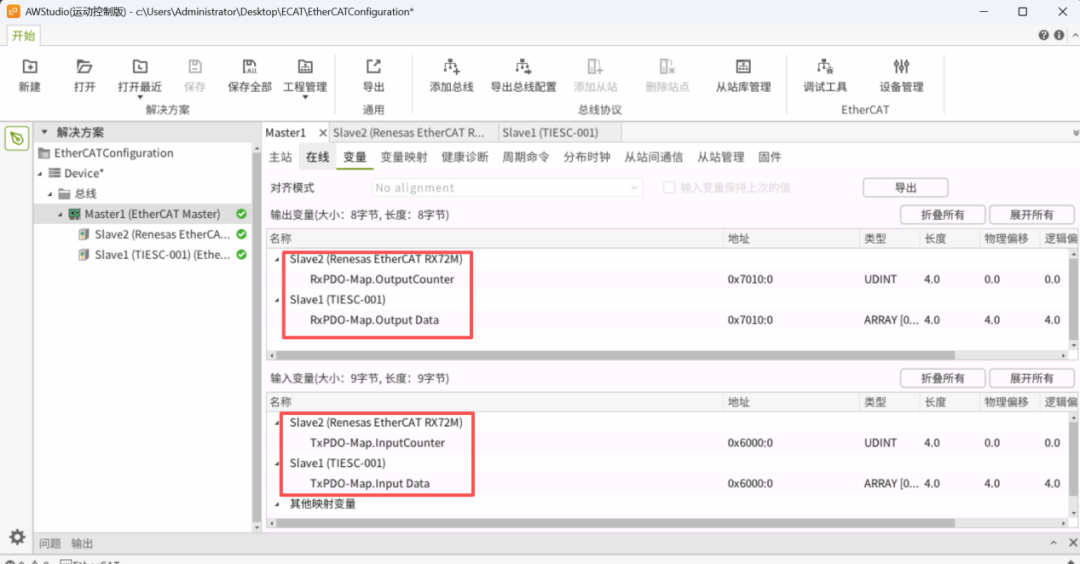
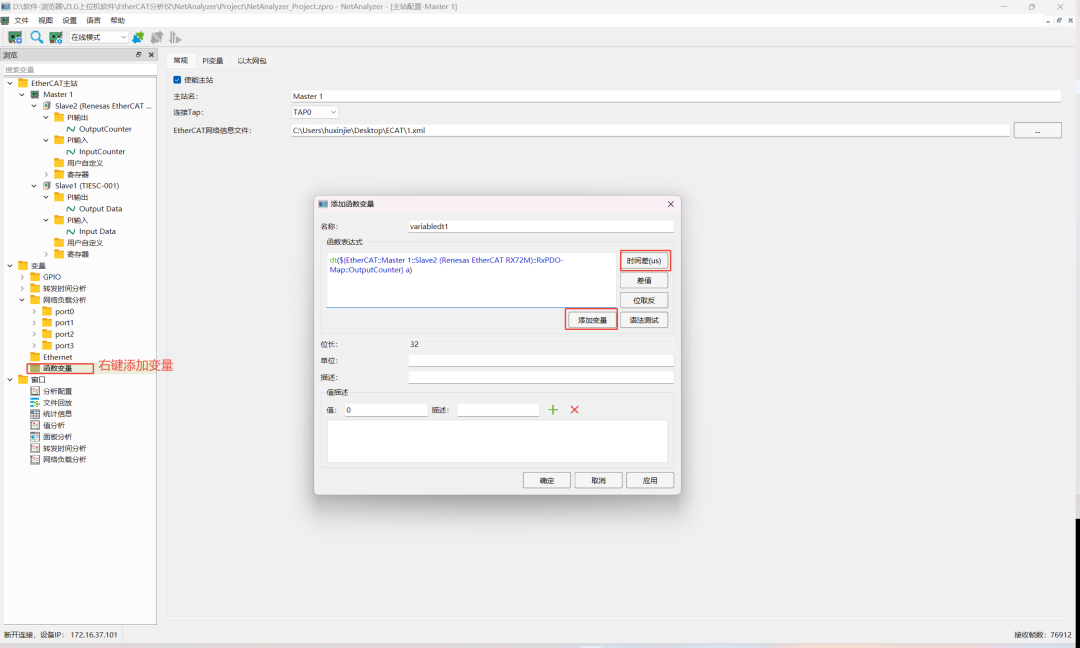
EtherCAT-Analyzer检测PDO数据和周期EtherCAT分析仪支持两种方式查看PDO周期。1. EtherCAT分析仪软件NetAnalyzer界面中新建主站,导入EtherCAT网络信息文件eni,添加“时间差”函数变量,插入EtherCAT节点下某个从站的PDO,即可在“值分析”窗口查看PDO数据和周期。1.1 新建主站,添加eni文件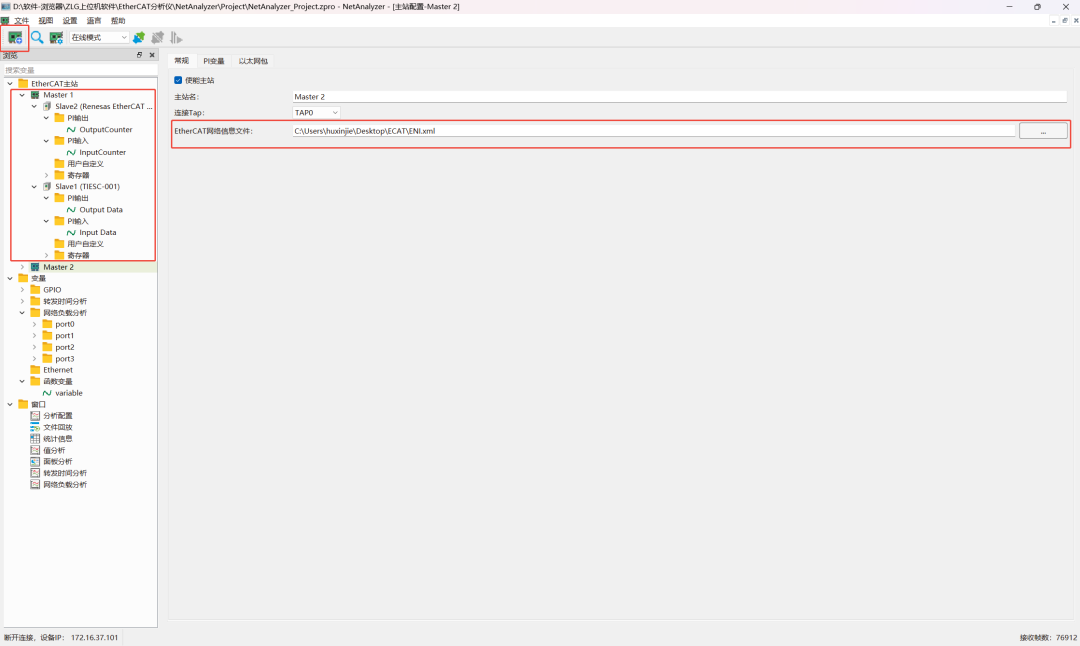 1.2 添加“时间差”函数变量,插入EtherCAT节点下某个从站的PDO
1.2 添加“时间差”函数变量,插入EtherCAT节点下某个从站的PDO
 1.3 “值分析”窗口查看PDO数据和周期
1.3 “值分析”窗口查看PDO数据和周期 2. 如果没有eni文件,可根据Wireshark抓包软件找出PDO特征数据,通过cnt字段判断TPDO/RPDO(cnt=0表示RPDO),EtherCAT-Analyzer从站分析软件NetAnalyzer新建过滤器,实现在“值分析”窗口查看PDO数据和周期。2.1 Wireshark看出PDO的length固定为72byte(含8字节时间戳,大部分主从站都用LRD/LWR/LRW指令去访问PDO数据)
2. 如果没有eni文件,可根据Wireshark抓包软件找出PDO特征数据,通过cnt字段判断TPDO/RPDO(cnt=0表示RPDO),EtherCAT-Analyzer从站分析软件NetAnalyzer新建过滤器,实现在“值分析”窗口查看PDO数据和周期。2.1 Wireshark看出PDO的length固定为72byte(含8字节时间戳,大部分主从站都用LRD/LWR/LRW指令去访问PDO数据)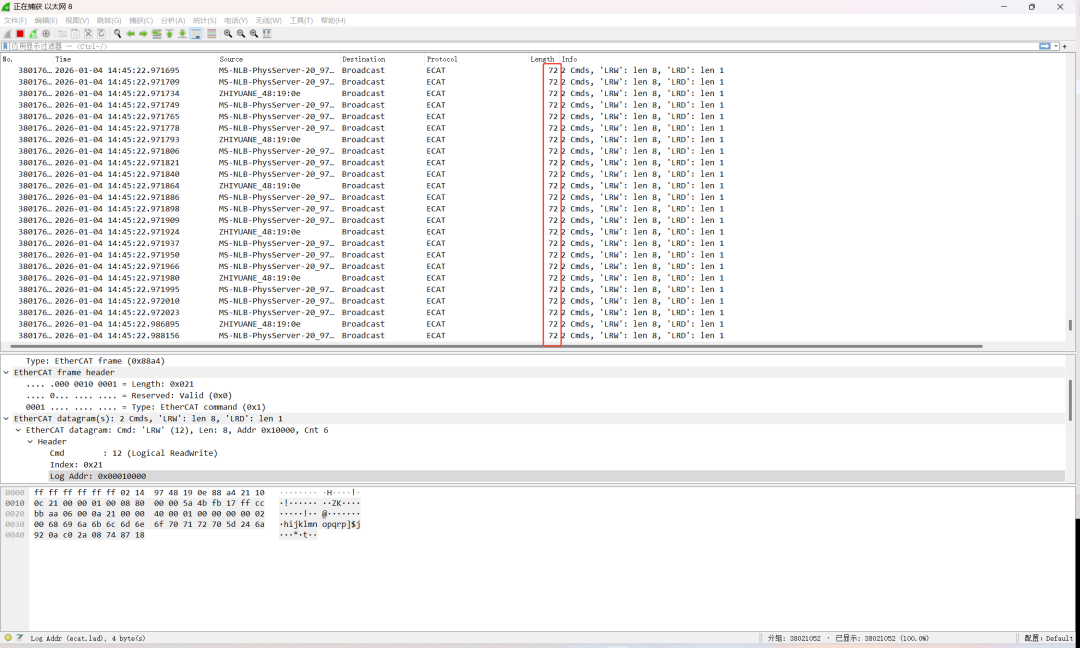 2.2 NetAnalyzer设置软件过滤器,需要添加port口,表明只采集一个方向的报文,否则会过滤出两个方向的报文,周期时间减半(length长度设置为64(8字节时间戳),EtherCAT-Analyzer的port0为主站RPDO输出端口)
2.2 NetAnalyzer设置软件过滤器,需要添加port口,表明只采集一个方向的报文,否则会过滤出两个方向的报文,周期时间减半(length长度设置为64(8字节时间戳),EtherCAT-Analyzer的port0为主站RPDO输出端口)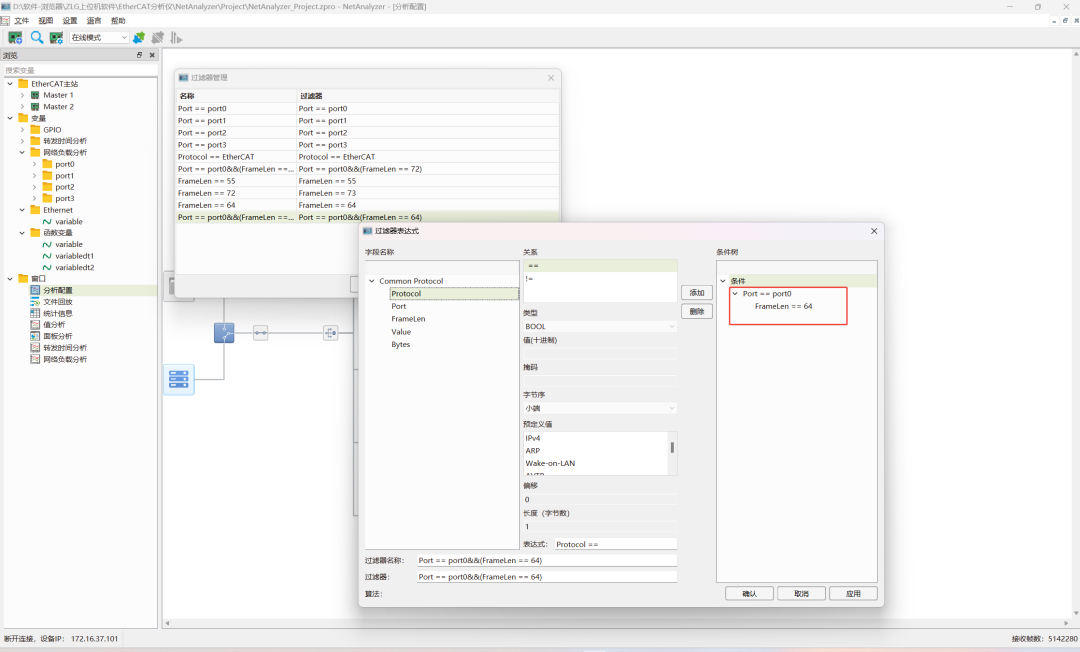 2.3 使能过滤器
2.3 使能过滤器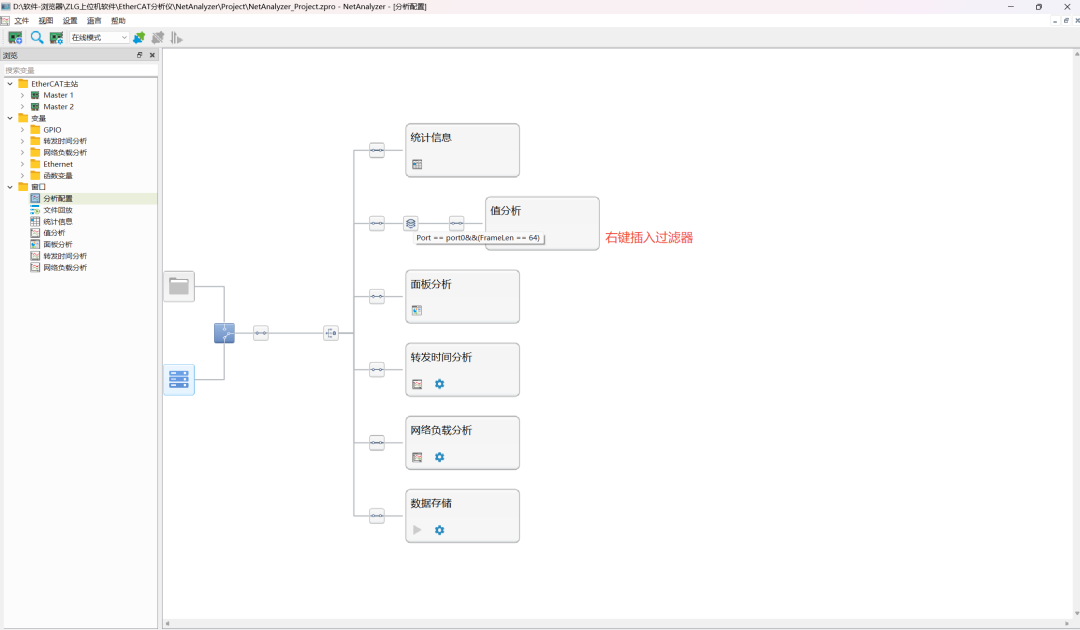 2.4 添加Ethernet变量,目前没有分析某一个值的要求,这部分内容可随便填
2.4 添加Ethernet变量,目前没有分析某一个值的要求,这部分内容可随便填 2.5 添加“时间差”函数变量,插入添加的PDO特征Ethernet变量
2.5 添加“时间差”函数变量,插入添加的PDO特征Ethernet变量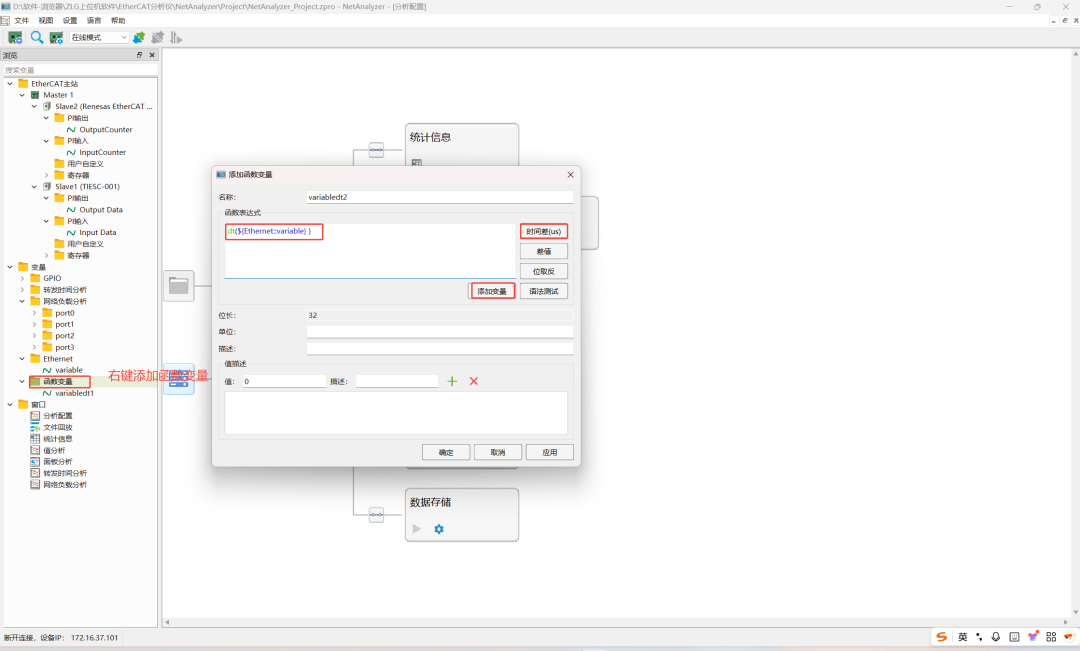 2.6 “值分析”窗口查看PDO数据和周期
2.6 “值分析”窗口查看PDO数据和周期
EtherCAT-Analyzer能够精准分析EtherCAT主从站的PDO周期,它不仅是保障系统稳定运行的关键手段,也是优化性能、诊断故障、确保安全的核心工具。
-
机器人
+关注
关注
214文章
31633浏览量
224473 -
总线
+关注
关注
10文章
3065浏览量
91966 -
ethercat
+关注
关注
20文章
1618浏览量
46342
发布评论请先 登录
名单公布!【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】+两本互为支持的书
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot
广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot

具身智能在机器人技术中的发展
解码“什么是具身智能工业机器人”
资讯速递 | 具身智能PMC(筹)发布“零成本”开源鸿蒙智能机器人系统




评论