 C-V2X仿真测试之虚拟场景设计
C-V2X仿真测试之虚拟场景设计

V2X(Vehicle-to-Everything)即车对“万物”,通过现代通信与网络技术,实现车与外界的信息交换共享(实时路况、道路信息、行人信息等一系列交通信息),从而提高驾驶安全性、降低交通拥堵、提高交通效率。
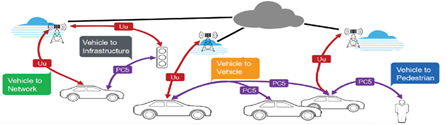
图1 V2X组织架构图
V2X主要包含V2V (Vehicle-to-Vehicle), V2I (Vehicle-to-Infrastructure), V2P (Vehicle-to-Pedestrian)和V2N (Vehicle-to-Network)。搭配V2X系统的车辆可以获取实时交通环境信息并对其分析,从而更加合理地规划行驶路径,在一定程度上辅助自动驾驶。
搭配V2X系统的车辆可以获取实时交通信息并对其分析,更加合理地规划行驶路径,在一定程度上辅助自动驾驶。
本文基于《CSAE 53-2020合作式智能运输系统 车用通信系统应用层及应用数据交互标准》对V2X虚拟仿真场景设计进行探索,设计思路如下图所示。
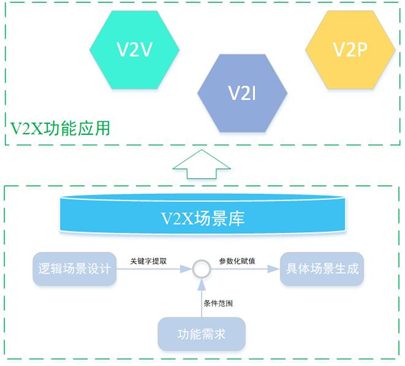
图2 V2X虚拟仿真场景设计流程
1、V2V场景设计
V2V (Vehicle-to-Vehicle)即车载单元之间通信。在进行该类功能的虚拟场景设计时,主要考虑车辆的驾驶行为及各车辆之间的相对运动关系,提取关键元素设计逻辑场景,再结合具体的功能需求对逻辑场景中的元素进行参数化赋值,生成具体的测试场景。
下面以前向碰撞预警(FCW)、交叉路口碰撞预警(ICW)为例详细介绍V2V虚拟场景设计。
1.1前向碰撞预警(FCW)
(1)功能定义
前向碰撞预警(Forward Collision Warning)是指,主车(HV)在车道上行驶,与在正前方同一车道的远车(RV)存在追尾碰撞危险时,FCW应用将对HV驾驶员进行预警,防止或减轻追尾事故带来的伤害。
(2)场景设计
根据功能定义描述可知,当主车(HV)与同车道远车(RV)之间的相对距离小于阈值时FCW功能触发。因此可设计以下4种逻辑场景:
场景一:HV以速度V0保持匀速行驶,RV在HV前方同车道距离X1处以初速度V1、减速度a减速行驶,当HV与RV之间的相对距离小于S(S
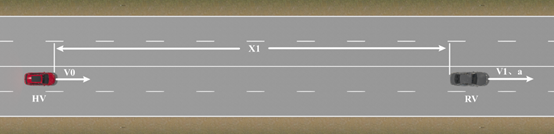
图3 FCW场景一示意图
场景二:HV以速度V0保持匀速行驶,RV在HV前方同车道距离X1处以速度V1(V1
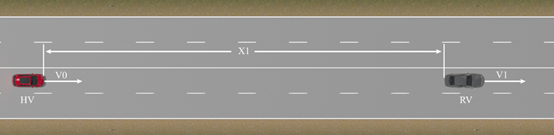
图4 FCW场景二示意图
场景三:HV以速度V0保持匀速行驶,RV在HV前方相邻相邻车道距离X1(X1<=S)处以速度V1行驶并突然变道至HV所在车道,此时FCW功能触发,FCW应用通过HMI对HV驾驶员进行预警;
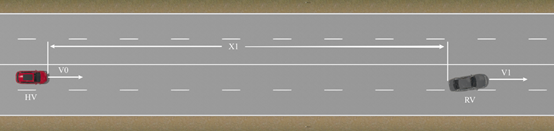
图5 FCW场景三示意图
场景四(逆向测试场景):HV以速度V0保持匀速行驶,RV在HV前方相邻车道距离X1(X1<=S)处以速度V1(V1<=V0)保持匀速行驶,FCW功能未触发;
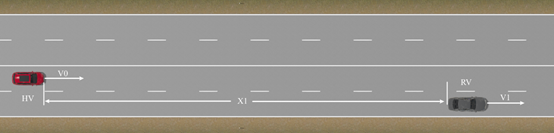
图6 FCW场景四示意图
结合需求文档,对以上逻辑场景元素HV行驶速度V0、RV行驶速度V1、RV减速度a及车道类型(直道、弯道)进行参数化赋值,生成具体的FCW虚拟测试场景。
1.2交叉路口碰撞预警ICW
(1)功能定义
交叉路口碰撞预警(Intersection Collision Warning)是指,主车(HV)驶向交叉路口,与侧向行驶的远车(RV)存在碰撞危险时,ICW应用将对HV驾驶员进行预警。
(2)场景设计
根据功能定义描述可知,HV驶向交叉路口并与任意一辆驶向同一路口的RV存在碰撞危险时(TTI及DTI小于阈值)ICW功能触发。因此可设计以下2种逻辑场景:
场景一:HV以恒定速度V0驶向前方交叉路口(角度α),RV在 HV左侧以恒定速度V1驶向路口并与HV相交于P点,HV到达P点的时间和距离分别为HV_TTI、HV_DTI ,RV到达P点的时间和距离分别为RV_TTI、RV_DTI;当以上TTI和DTI满足条件时(存在碰撞危险)ICW功能触发,ICW应用通过HMI对HV驾驶员进行预警;
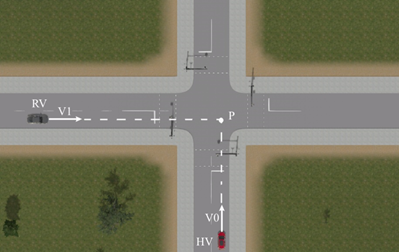
图7 ICW场景一示意图
场景二:HV以恒定速度V0驶向前方交叉路口(角度α),RV在 HV右侧以恒定速度V1驶向路口(与HV无交叉点),HV到达P点的时间和距离分别为HV_TTI、HV_DTI,RV到达P点的时间和距离分别为RV_TTI、RV_DTI;当以上TTI和DTI满足条件时(存在碰撞危险)ICW功能触发,ICW应用通过HMI对HV驾驶员进行预警;
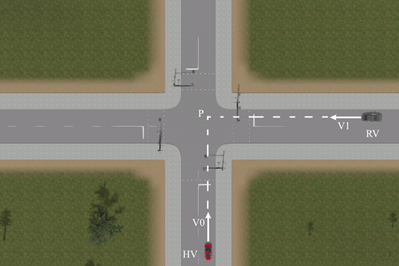
图8 ICW场景二示意图
结合需求文档,对以上逻辑场景元素HV_TTI、HV_DTI、RV_TTI、RV_DTI及交叉路口角度α进行参数化赋值,生成具体的ICW虚拟测试场景。
2、V2I场景设计
V2I (Vehicle-to- Infrastructure)即车载单元与路侧单元通信。在进行该类功能的虚拟场景设计时,主要考虑交通环境信息(交通标志、交通事件、交通灯及道路信息),提取关键元素设计逻辑场景,再结合具体的功能需求对逻辑场景中的元素进行参数化设置,生成具体的测试场景。
下面以车内标牌(IVS)、闯红灯预警(RLVW)为例详细介绍V2I虚拟场景设计。
2.1车内标牌(IVS)
(1)功能定义
车内标牌(In-Vehicle Signage)是指,当装载车载单元(OBU)的HV收到由路侧单元(RSU)发送的道路数据以及交通标牌信息,IVS应用将给予驾驶员相应的交通标牌提示,保证车辆的安全行驶。
(2)场景设计
根据功能定义描述可知,当HV驶入前方标识牌有效范围区域时,IVS功能触发。因此可设计逻辑场景:
场景一:HV以速度V0保持匀速行驶,前方有潮汐车道,当HV在标牌有效时间内驶入标牌有效区域时,IVS功能触发,IVS应用通过HMI将标牌信息显示给HV驾驶员;

图9 IVS场景一示意图
结合需求文档,对以上逻辑场景元素HV行驶速度V0、标牌类型(潮汐车道、限速等)进行参数化赋值,生成具体的IVS虚拟测试场景。
2.2闯红灯预警(RLVW)
(1)功能定义
闯红灯预警(Red Light Violation Warning)是指,主车(HV)经过有信号控制的交叉口(车道),车辆存在不按信号灯规定或指示行驶的风险时,RLVW应用对驾驶员进行预警。
(2)场景设计
根据功能定义描述可知,当HV驶向前方有信号灯控制的交叉口(车道)且存在闯红灯风险时,RLVW功能触发。因此可设计逻辑场景:
场景一:HV在左转(直行)车道上以恒定速度V0驶向有信号灯控制的交叉口,当前左转(直行)车道信号灯状态为红灯,且红灯剩余时间大于HV到达路口停止线的时间;HV存在闯红灯危险,此时RLVW功能触发,RLVW应用通过HMI对HV驾驶员进行预警;

图10 RLVW场景一示意图
结合需求文档,对以上逻辑场景元素HV行驶速度V0、HV所在车道及车道匹配的信号灯状态(灯色、时间)进行参数化赋值,生成具体的RLVW虚拟测试场景。
3、V2P场景设计
V2P (Vehicle to Pedestrians)即车载单元与行人设备通信。在进行该类功能的虚拟场景设计时,主要考虑弱势交通参与者与车辆之间的相对运动关系,提取关键元素设计逻辑场景,再结合具体的功能需求对逻辑场景中的元素进行参数化设置,生成具体的测试场景。
下面以弱势交通参与者碰撞预警(VRUCW)为例详细介绍V2P虚拟场景设计。
3.1弱势交通参与者碰撞预警(VRUCW)
(1)功能定义
弱势交通参与者碰撞预警(Vulnerable Road User Collision Warning)是指,HV在行驶中,与周边行人(P,Pedestrian;含义拓展为广义上的弱势交通参与者,包括行人、自行车、电动自行车等)存在碰撞危险时,VRUCW应用将对车辆驾驶员进行预警,也可对行人进行预警。
(2)场景设计
根据功能定义描述可知,当HV与周边行人存在碰撞危险时,VRUCW功能触发。因此可设计逻辑场景:
场景一:HV以速度V0保持匀速行驶,侧前方有行人横穿马路,行驶速度为V1;HV与P存在碰撞危险,VRUCW功能触发,VRUCW应用通过HMI对HV驾驶员进行预警;

图11 VRUCW场景一示意图
场景二:HV在倒车时,侧后方有行人横穿马路,行驶速度为V1;HV与P存在碰撞危险,VRUCW功能触发,VRUCW应用通过HMI对HV驾驶员进行预警;
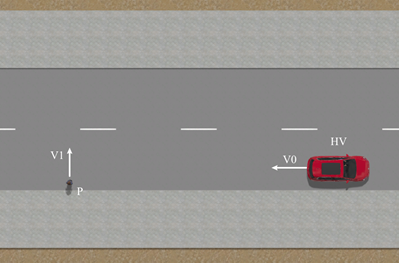
图12 VRUCW场景二示意图
场景三(逆向测试场景):HV以速度V0保持匀速行驶,侧前方有行人与HV同向行驶,行驶速度为V1;HV与P不存在碰撞危险,VRUCW功能未触发;

图13 VRUCW场景三示意图
结合需求文档,对以上逻辑场景元素HV行驶速度V0、弱势交通参与者类型P、行驶速度V1进行参数化赋值,生成具体的VRUCW虚拟测试场景。
4、总结
本文举例详细介绍了CSAE 53-2020(第一阶段)中V2V、V2I及V2P虚拟仿真场景的设计思路及方法,对于CSAE 157-2020(第二阶段)中的功能应用,场景搭建思路及方法与之类似,以协作式车辆编队管理(CPM)为例,搭建的虚拟场景如下:
视频(请联系北汇信息获取)
协作式车辆编队管理(CPM)
本文中V2X虚拟仿真场景设计是基于仿真软件DYNA4实现的,DYNA4支持场景建模、传感器建模及动力学建模等功能,大家有这方面需求的话可与我们联系。
北汇信息是德国Vector公司、德国Rohde&Schwarz(简称R&S)公司、德国IPG公司、德国PikeTec公司、美国Perforce公司等国际知名企业的官方合作伙伴,同时也是IMT-2020(5G)推进组蜂窝车联(C-V2X)工作组成员,我们致力与在V2X领域积极开展LTE-V2X和5G-V2X的测试验证技术研究等工作,积极推动中国V2X的产业落地,为客户提供V2X成套测试系统及服务。
参考文献
CSAE 53-2020合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第一阶段)
CSAE 157-2020合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)
文中部分内容参考于Vector。
-
V2X
+关注
关注
25文章
219浏览量
45136
发布评论请先 登录
深入剖析TS80C52X2:高性能8位微控制器的卓越之选
深入剖析PI7C9X2G304EL:PCI Express Gen 2 Packet Switch的卓越之选
Sim Pro 实现仿真测试场景全量构成

使用PLCSIM Advanced V8仿真测试S7-1200 G2的Modbus TCP通信

如何高效构建与测试非结构化道路场景?

9DBL02x2/9DBL04x2/9DBL06x1/9DBL08x1C:PCIe零延迟/扇出缓冲器的卓越之选
如何选择适合的智驾仿真工具进行场景生成和测试?
讲讲如何闭环自动驾驶仿真场景,从重建到可用?

在Ubuntu 虚拟机中使用verilator对蜂鸟E203内核进行仿真
5.9 GHz C-V2X 和 802.11p DSRC 高功率前端模块 skyworksinc

智驾仿真测试实战之-&quot;虚实融合:ViL功能测试&quot;

科普|V2X是什么意思?

技术预见者的实践之路:C-V2X发展五年记
《聊一聊ZXDoc》之CAN总线仿真、面板仿真

基于CANoe的V2X安全通信方案



评论