 如何高效构建与测试非结构化道路场景?
如何高效构建与测试非结构化道路场景?

01 引言
随着智能驾驶仿真测试等技术的快速发展,行业评估体系已从单一的“测试里程数”向更全面的“场景覆盖度”及“边缘场景”检验演进。在此趋势下,实车测试向仿真环境迁移已成为提升验证效率与安全的必然选择。统计数据表明,一套成熟的自动驾驶算法验证通常遵循“99.9%仿真测试+0.09%封闭场地测试+0.01%公开道路测试”的黄金比例[1]。
然而,当前市场上主流的仿真工具所构建的场景,大多集中于结构清晰、标线完整的规范化道路环境,如城市高架、笔直高速及标准停车场。这些“结构化道路”虽然是现代路网的重要组成部分,却远未涵盖真实世界路况的多样性。当智驾系统需要向更高阶的L3、L4级别迈进,或当车辆需进入矿区、乡野、山地等特殊区域时,那些缺乏清晰车道线、路面起伏不平的“非结构化道路”,便成为制约系统实际落地与可靠运行的关键瓶颈。
因此,实现高效、真实且可扩展的非结构化道路仿真能力,已成为当前智能驾驶测试验证领域的核心挑战与迫切需求。在此背景下,本文旨在系统阐述非结构化道路仿真的必要性、当前面临的技术难点及其解决方案。
02 非结构化道路测试必要性
在传统的ODD(运行设计域)定义中,非结构化道路常被归类为“特定场景”。然而在实际交通环境中,城乡结合部、复杂山路、临时施工路段以及各类园区内部道路等场景占有相当比例。
对智驾算法而言,结构化道路具备高精地图先验信息、清晰的车道线与规范交通标志,测试条件相对明确。而非结构化道路则缺乏此类结构化信息,系统必须完全依靠自身感知与决策能力:
车道标识缺失或模糊:车辆需依赖视觉、雷达等多源数据实时判断可行驶区域,无法直接依赖车道线进行跟踪。
道路几何形状复杂:与高速公路平缓线形不同,乡村或山地道路常包含急弯、连续弯道乃至之字形坡道,对车辆动力学控制与轨迹规划提出更高要求。
地形与环境因素耦合显著:在非结构化道路上,路面常存在起伏、坑洼、混合材质等情况,形成复杂的三维实体结构,影响车辆通过性与控制稳定性。
若仿真测试仅局限于理想化道路环境,则系统在真实复杂路况中可能因无法识别道路边界或应对突发颠簸而产生预期外的行为。因此,针对非结构化道路的仿真测试并非功能补充,而是实现自动驾驶系统从基础功能到鲁棒性提升的必经环节。
03 非结构化道路仿真难点
目前主流仿真地图生成多依赖于OpenDRIVE等标准格式或内部定制格式。这类格式主要针对结构化道路设计,擅长描述车道拓扑、连接关系与路口结构(左车道是谁,右车道是谁,路口组成是怎样的)。
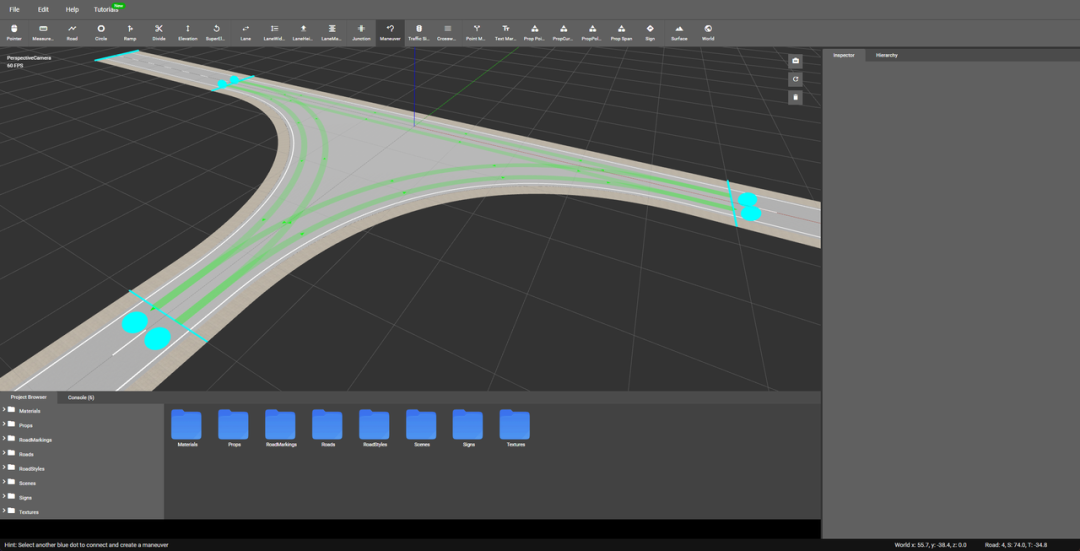
道路编辑器示例
然而,当需要描述依山而建、边缘不规则、表面存在随机破损的土路时,现有格式往往显得不足:
难点一:地形建模能力有限。传统高精地图导入仿真后多为平面投影,缺乏高程与路面形态细节,车辆动力学反馈仍基于平坦路面假设,难以真实反映坡度与起伏的影响。
难点二:场景编辑灵活性不足。若要在仿真中构建包含混合路况的极端测试场景,通常需要借助专业三维建模工具从零开始建造,此类模型往往缺失道路逻辑信息,导致难以进行场景交互测试与系统性验证。
由此形成当前仿真测试的两难局面:要么使用具有完整逻辑路网但缺乏真实地形表现的“理想道路”,要么采用外观逼真却难以嵌入测试逻辑的纯视觉场景。
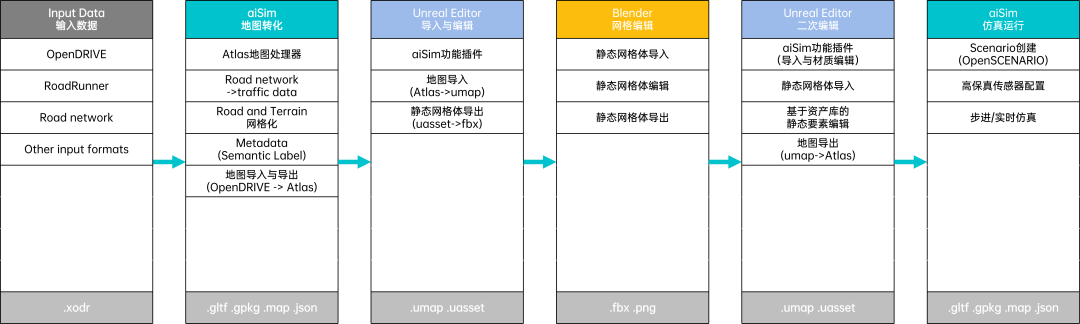
针对上述问题,aiSim通过集成外部三维编辑工具,建立了一套高效的工作流程,实现逻辑路网与高真实感地形的有机结合。其核心流程包括:OpenDRIVE导入 → Atlas地图转换 → Unreal/Blender编辑 → Atlas地图导出 → aiSim高保真仿真运行。

基础数据转换:从OpenDRIVE到Atlas
aiSim支持直接导入行业通用的OpenDRIVE格式地图,并将其转化为内置的Atlas地图格式。
Atlas格式同时保留道路网络、语义标签、交通信息与地形数据,使得原始地图具备可通过编辑工具进行地形深化处理的扩展能力。
灵活地形编辑:Unreal Editor与Blender的协同
通过aiSim插件,用户可在Unreal Editor中直接调用地图资源,并借助Blender进行网格编辑,实现对道路几何与地表形态的精细化调整:
- 大范围地形重塑:在UE或Blender中重新分配地形网格,通过拖拽、变形及参数化方式生成多样化的地势起伏。
- 路面细节刻画:使用Blender可模拟路面裂缝、隆起、车辙等局部特征,这些特征不仅体现为视觉纹理,同时可具备物理碰撞属性与材质特性。
闭环测试验证:高保真传感器与物理仿真
编辑后的非结构化道路地图可直接被导入aiSim仿真器,并结合高保真仿真传感器进行场景方针:
- 车辆动力学反馈:在地图编辑过程中定义的路面坑洼、坡度变化将直接影响车辆模型的状态输出,车轮响应、车身姿态等行为均可以得到准确模拟。
- 感知系统仿真:结合aiSim的高保真传感器模型,可复现雷达在碎石路面产生的复杂点云模式、摄像头在颠簸条件下的卷帘快门效应等图像效果。配合语义标签信息,能够为感知算法验证提供准确的基准真值。
05 结语
总而言之,aiSim可以说是为智驾测试提供了一条有效应对复杂道路环境的编辑路径。无论是乡村土路或矿山坡道,使用者无需完全依赖成本高昂的实地采集与高风险实车测试。
此外通过OpenDRIVE至Atlas的逻辑转换,结合Unreal Editor与Blender的编辑能力,即可在仿真环境中构建各类具有挑战性的非结构化道路场景,为自动驾驶算法的完善与验证提供有效支撑。
▍关于康谋科技
康谋是一家自动驾驶解决方案供应商(前身是虹科自动驾驶事业部)。
我们以数据为驱动力,提供高性能的数据采集、记录、传输方案,针对各种驾驶场景进行精准的仿真模拟,以及对大量自动驾驶数据进行高效、高质量处理。我们的一站式服务能够满足自动驾驶领域研发测试的全流程需求。
通过深入了解客户需求,结合行业最新技术和趋势,我们致力于为客户提供最适配的自动驾驶解决方案,助力客户在自动驾驶领域取得更大突破。
-
测试
+关注
关注
9文章
6505浏览量
131783 -
智能驾驶
+关注
关注
5文章
3073浏览量
51421 -
仿真测试
+关注
关注
0文章
116浏览量
11819
发布评论请先 登录
结构化布线系统有哪些难题
MaxCompute(ODPS)上处理非结构化数据的Best Practice
TrustZone结构化消息是什么?
一种结构化道路环境中的视觉导航系统详解
改进区域生长的非结构化道路识别
使用贝叶斯决策和Hough实现非结构化道路检测与障碍物识别算法
怎么样使用机器视觉技术和支持向量机实现非结构化道路的检测

如何在Pixie中收集大量非结构化数据
分布式融合存储解决方案驱动非结构化数据多模计算

CFD 设计利器:结构化和非结构化网格的组合使用

非结构化数据中台:企业AI应用安全落地的核心引擎

高保真仿真地图生成:UE+Blender协同编辑在aiSim中的实现路径!




评论