 ALIO-Hybrid Hexapod®颠覆传统六轴位移台的创新型设计“Point Precision®点精度”!
ALIO-Hybrid Hexapod®颠覆传统六轴位移台的创新型设计“Point Precision®点精度”!

当今的机器人行业受到对更小组件和零件的终极追求的驱动,这些组件和零件通常具有亚微米级的功能,更可靠、可重复和准确的制造工艺。该领域创新和组件缩小的一个重要部分是纳米级高质量运动控制解决方案。如果要讨论高水平精密运动控制,那么当今市场上大量的六足位移台设备是不容忽视的。然而,由于供应商广告和缺乏适当的标准化测试,这些系统存在很多错误信息。对于用户所追求的真正的精度有着不同的评价标准。下面我来就六轴位移台进行详细的介绍:
1
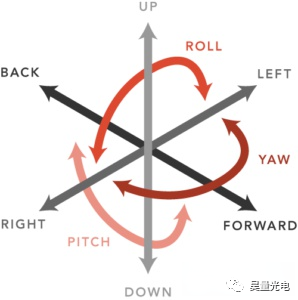
六自由度
首先我们了解下物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度 。因此,要完全确定物体的位置,就必须清楚这六个自由度。
2
ALIO-Hybrid Hexapod六轴位移台独特优势
ALIO’s Hybrid Hexapod 为 6D Motion 提供了一种革命性的方法,与传统的六足设计相比,精度高出一个数量级,行程更长,速度更快,刚度更大。

ALIO 的方法结合了精确的 XY 平台、三脚架和连续旋转的 theta 轴(而不是 6 个独立的腿),提供卓越的整体性能。这是一种颠覆行业的创新型方法,使得6自由度位移台具有更高的性能,具有更好竞争力的价格。
功能的独特优势包括:
- 亚微米级别的重复定位精度
- 在移动很远距离的过程中工具中心点“TCP” 的稳定性远远优于同类产品
- 新型的矩形棱镜运动轨迹范围(工作体积) >10倍的传统六足伞状运动轨迹的范围
| 传统六足位移台的不足 | Hybrid Hexapod 的优势 |
| -任何方向的移动都需要调动6个位移腿 | +只需要1 个轴就可以以更高的精度产生相同的移动 |
| -除了Z之外的任何移动都会使所有的腿处于张力/压缩的组合中 | +三脚架支腿始终处于压缩状态,负载居中 |
| -所有的腿运动过程中都有直接/间接的反弹 | +预加载球面轴承设计,无间隙,精度更高 |
| -运动学方程更复杂 | +运动学更简单 = 更快的处理和更好的精度 |
| -不可预测的行程限制,有限的运动轨迹范围 | +XY 载物台决定 XY 行程,三脚架决定 Z 和 pitch/roll工作体积为立方体形状,可比传统尺寸大 4-12 倍 |
| -没有直线导轨导致链接存在无效运动 | +每个链接都有线性导轨,以提高精度和可重复性 |
| -电机没有配备编码器或旋转编码器 | +三脚架的每个链接都包含线性编码器 |
| -运动轨迹不平滑存在误差 | +移动和感应外力使操作员知道有效载荷在哪里,而不仅仅是依靠计算 |
| -速度的局限 | +更高速度能力的直线电机 |
| -削减了运动路径的精度 | +由于位置的直接反馈,非常精确的运动路径 |
| -平均故障时间M TTF ~10,000 – 30,000 Hours | +平均故障时间MTTF ~200,000 – 300,000 Hours |
3
主要性能参数
| 参数指标 | 数值 | 图片 |
旋转行程(Yaw) 旋转速度 | 无限行程(360°) 180 deg./s |
|
垂直行程(Max. / Min. ) 最大线性/旋转速度: 线性分辨率: 双向重复性: 位移精度: | 200/6mm 0.5m/s, 180 deg./s < 5nm < +/- 80nm < 1.0um |
|
XY行程(Max. / Min. ) 最大线性/旋转速度: 线性分辨率: 双向重复性: 位移精度: | 无限制/60mm 0.5m/s, 180 deg./s < 5nm < +/- 80nm < 1.0um |  |

4
传统六足位移台和Hybrid Hexapod六轴位移台工作体积比较
根据六足腿的长度及其间距,传统六足的工作容积呈蘑菇状。Hybrid Hexapod 具有立方工作体积,其中存在的唯一限制是依赖于倾斜/倾斜角的 z 行程。传统六足动物已经存在这种限制。Hybrid Hexapod 的工作体积在XY平面不受三脚架支腿的限制。
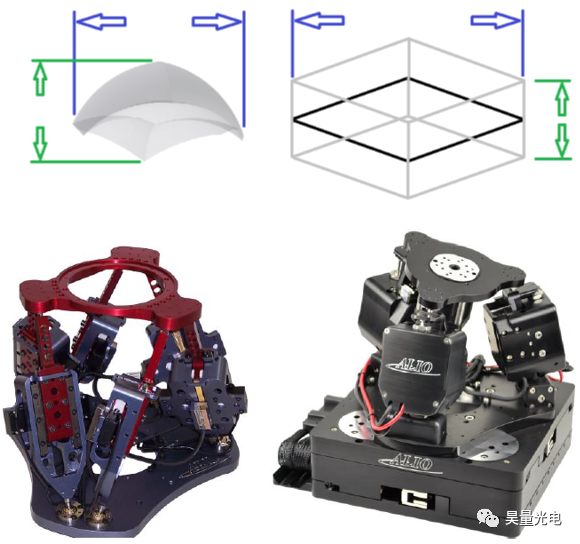
传统的六足机位移台在 XY 行程的边缘处的 Z 轴行程和角度行程受到限制。Hybrid Hexapod 不受工作空间内任何位置的 Z 行程限制。Hybrid Hexapod 的 Z 轴行程能够移动到由 XY&Z 总行程定义的工作容积的所有八个角;它不像传统的六足机器人那样在 XY 行程的边缘受到限制。
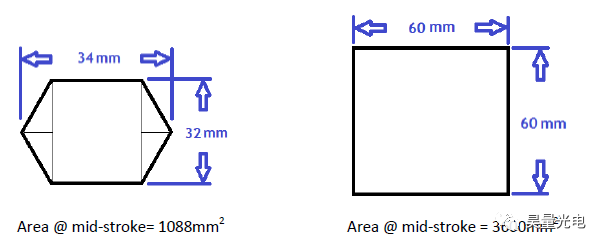
与相同尺寸的 Hybrid Hexapod 相比,传统的六足位移台和 Hybrid Hexapod 的总工作体积比为 1:4
5
当您命令单个自由度移动时,有多少个硬件轴在移动?
| 移动轴 | 传统六足位移台 | Hybrid Hexapod六轴 |
| X轴移动 | 6 | 1 |
| Y轴移动 | 6 | 1 |
| Z轴移动 | 6 | 1 |
| Theta X旋转 | 6 | 1 |
| Theta Y | 6 | 1 |
| Theta X | 6 | 1 |
6
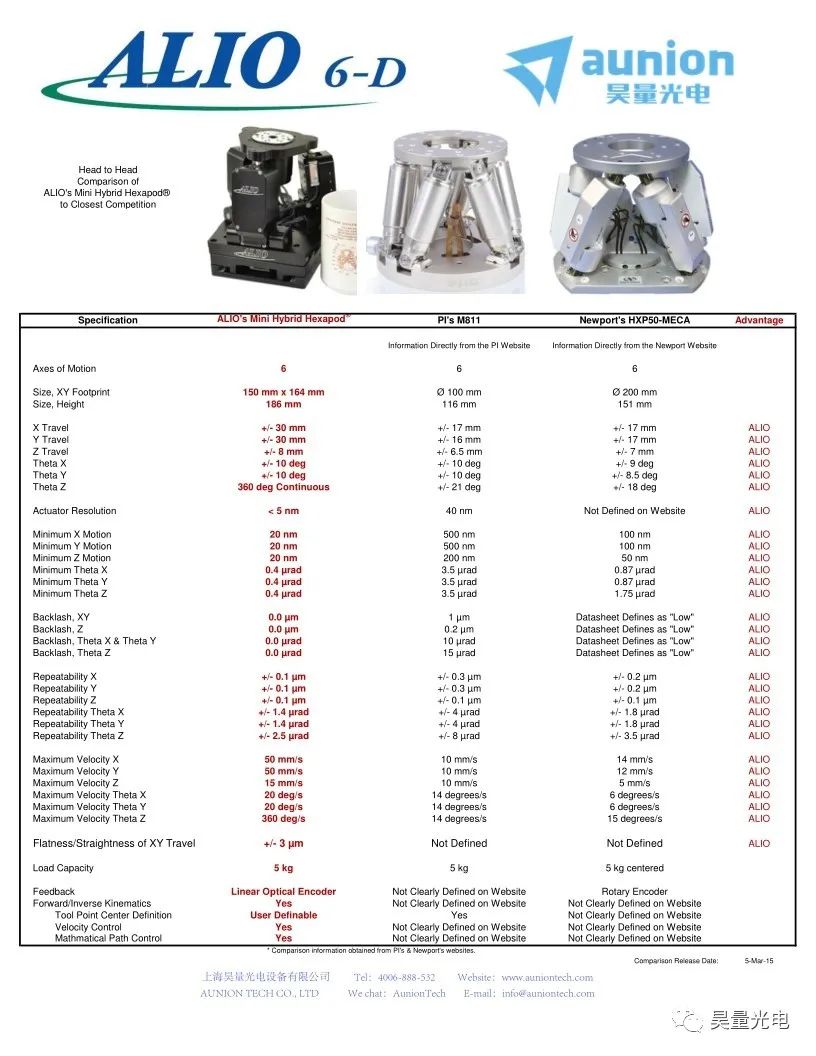
和传统六足设备同类型型号主要参数对比优势
关于生产商ALIO Industries:
ALIO Industries 成立于 2001 年,由一支由杰出工程师组成的无与伦比的团队推动,他们痴迷于纳米级运动控制、客户成功以及尽可能突破感知界限。今天,ALIO非常重视对客户的响应。作为一家公司,我们一直专注于纳米级精度,因此我们拥有声誉、知识库和稳定性,这在需要超精确和可靠的运动控制时是无法比拟的。与 ALIO 作为您的合作伙伴,您将与一个强大、完善、财务稳定、全球认可和受人尊敬的品牌合作,为各种行业领先客户提供服务。我们培养伙伴关系的基本含义,相信当知识在整个团队中公开共享时,结果总是更好。这也使我们能够创造性地为任何应用找到实用的运动控制解决方案。ALIO 的团队以诚实、正直和热情为特征。我们专注于成功,而不是为了现金流而出售解决方案。这就是性格!这就是为什么我们在纳米级运动控制解决方案领域享有较高的声誉。
上海昊量光电作为ALIO在中国大陆地区的主要代理商,为您提供专业的选型以及技术服务。对于ALIO有兴趣或者任何问题,都欢迎通过电话、电子邮件或者微信与我们联系。
关于昊量光电:
昊量光电 您的光电超市!
上海昊量光电设备有限公司致力于引进国外先进性与创新性的光电技术与可靠产品!与来自美国、欧洲、日本等众多知名光电产品制造商建立了紧密的合作关系。代理品牌均处于相关领域的发展前沿,产品包括各类激光器、光电调制器、光学测量设备、精密光学元件等,所涉足的领域涵盖了材料加工、光通讯、生物医疗、科学研究、国防及前沿的细分市场比如为量子光学、生物显微、物联传感、精密加工、先进激光制造等。
我们的技术支持团队可以为国内前沿科研与工业领域提供完整的设备安装,培训,硬件开发,软件开发,系统集成等优质服务,助力中国智造与中国创造! 为客户提供适合的产品和提供完善的服务是我们始终秉承的理念!
-
机器人
+关注
关注
214文章
31634浏览量
224522
发布评论请先 登录
探索 Precision LM4040 电压参考模块:高精度测量的理想之选
六轴驱动,如何一步到位?TMCM-6214 的多轴控制!

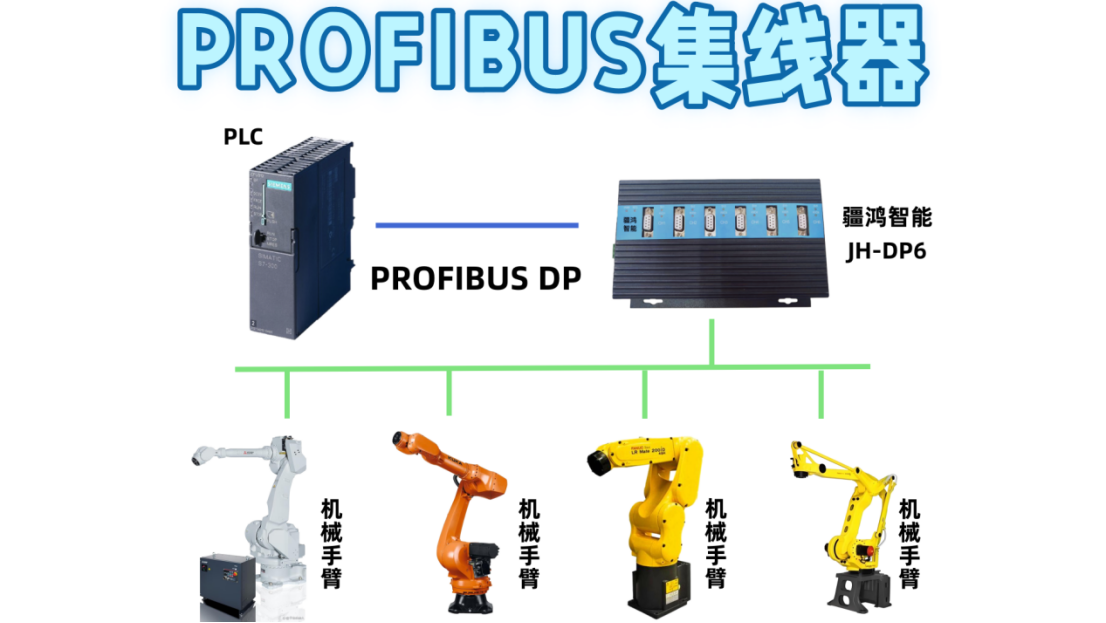
疆鸿智能PROFIBUS集线器,驱动六轴机器人高效协同,打造汽车配件智慧产线
解决传统位置检测痛点:昆泰芯KTH5701AQ3QNS高精度3D霍尔传感器的创新之道

非接触位移传感器:工业精密测量的隐形守护者

浮点指令(二:双精度)
浮点指令(一:单精度)
微米级精度,毫米级革新——重新定义精密测量的微小位移传感器
基于SoC/FPGA的云台多轴协同驱动解决方案

混合键合(Hybrid Bonding)工艺介绍
新型磁传感器技术@Melexis


微型位移传感器:精密制造与科研创新的“隐形引擎”
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品




评论