 激光雷达按探测方式分类有那些?
激光雷达按探测方式分类有那些?

按探测方式分类:
直接探测激光雷达
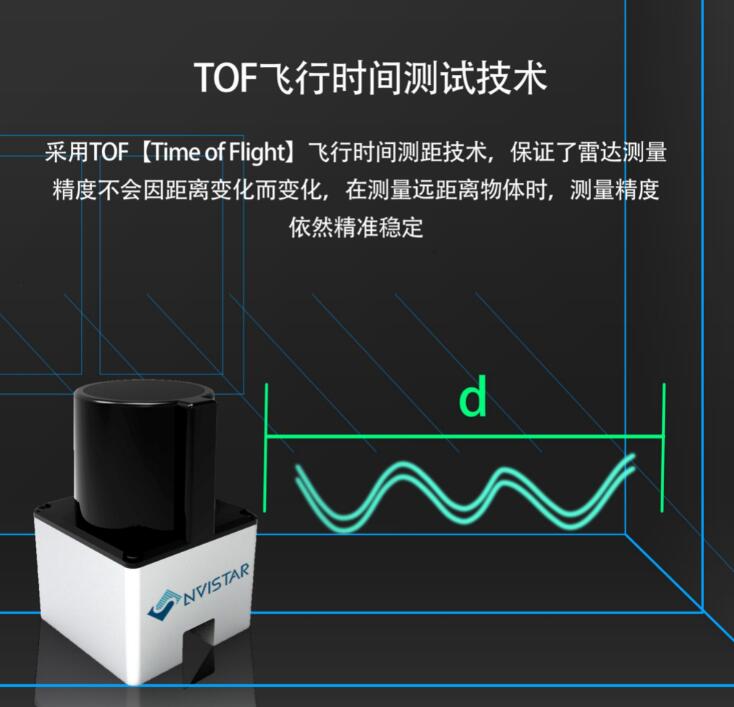
直接探测型激光雷达的基本结构与激光测距机颇为相近。工作时,由发射系统发送一个信号,经目标反射后被接收系统收集,通过测量激光信号往返传播的时间而确定目标的距离。至于目标的径向速度,则可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度。
深圳不止技术研发激光雷达VP300是不止技术推出的单线激光雷达产品。该雷达使用脉冲飞行时间法(Pulsed ToF)进行距离测量,其内部结构采用转镜式设计,即通过高速旋转的反射镜面将测距模块发射的不可见红外激光偏转到不同的角度,从而实现对同一水平面300°范围内环境轮廓的扫描测量。VP300每秒可输出 20K 点云数据,同时可满足客户最大50米测距需求;采用905nm红外激光,配合自研信号处理算法,整机防尘防水达到IP65,满足适用送餐机器人,服务机器人,清洁机器人,无人叉车,AGV小车等场景。
相干探测激光雷达
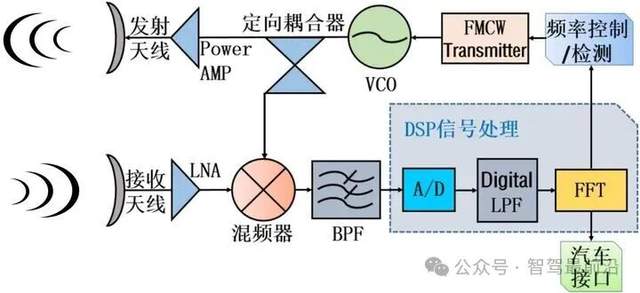
相干探测型激光雷达有单稳与双稳之分,在所谓单稳系统中,发送与接收信号共用一个光学孔径,并由发送-接收开关隔离。而双稳系统则包括两个光学孔径,分别供发送与接收信号使用,发送-接收开关自然不再需要,其余部分与单稳系统相同
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
982文章
4559浏览量
197140
发布评论请先 登录
相关推荐
热点推荐
万线激光雷达是依托什么技术实现的?
[首发于智驾最前沿微信公众号]在自动驾驶领域,当谈论激光雷达时,线束多少一直是其关键指标,从最初的16线、64线到后来的128线,线数越高,意味着扫描出的点云越密集,看得也越清楚。就在最近,速腾聚创

固态激光雷达参数以及避障视频
数量:100pcs。
注 3:激光雷达是精密设备,在使用过程中需要注意防护,在高低温或者强烈振动的使用场景中,相对误 差的参数指标会相对更大一些,有可能会超过典型值。
2.2 电气参数
2.3 接口定义
激光雷达对外
发表于 03-27 14:14
自动驾驶激光雷达会伤害人体吗?
人体造成伤害,那事实果真如此吗? 什么是激光雷达? 激光雷达作为一种主动感知传感器,它的核心工作方式是发射大量的激光脉冲,这些脉冲碰到前方的物体后会反射回来,当接收到反射信号后就可以计

雨雾天气,毫米波雷达表现为什么比激光雷达更好?
在自动驾驶领域,要让汽车自己“看懂”周围环境,必须借助激光雷达、毫米波雷达等传感器。它们虽都用于探测周围物体,但物理原理和应对恶劣天气的能力却有明显不同。
如何解决激光雷达点云中“鬼影”和“膨胀”问题?
[首发于智驾最前沿微信公众号]之前在聊激光雷达点云“鬼影”和“膨胀”的文章中( 相关阅读: 激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?),很多小伙伴都提到一个问题,那就是激光雷达点云中

如何为自动驾驶汽车选择一款合适的激光雷达?
物体离传感器多远。把很多这样的测距结果按角度组织起来,就能得到一个三维的“点云”,用来表示周围物体的形状和位置。激光雷达的主要作用就是让车知道周围有哪些东西、在什么位置、大概是什么大小。 它是怎么工作的?

ToF 技术再进化:面阵固态激光雷达在各环境中的可靠性
面阵固态激光雷达的“发家史”激光雷达通常由激光发射、激光接收、光束操纵和信息处理四大系统组成,其工作原理是向目标探测物发送

激光雷达为什么会出现串扰的问题?
[首发于智驾最前沿微信公众号]自动驾驶技术自提出以来,激光雷达就是非常重要的感知硬件,即便到现如今很多技术方案开始倾向于纯视觉时,依旧有很多的车企坚定地选择激光雷达。激光雷达常见的工作方式

自动驾驶里的激光雷达有何作用?
判断周围物体的空间位置与几何形状。假期闲叙,就和大家简单聊聊激光雷达。 激光雷达到底是什么 激光雷达通常由激光发射器、接收器(光电探测器)、

800线!禾赛发布ETX激光雷达
。 作为专为L3/L4级自动驾驶打造的旗舰产品,ETX激光雷达的核心突破在于实现了数字单光子平台技术的全栈自研。从激光发射、信号处理到单光子接收三大核心模块,再到激光器、探测器、
发表于 09-13 16:16
•2322次阅读
激光雷达在自动驾驶汽车的应用
激光雷达 (LIDAR) 是指光探测与测距技术,有时亦称为飞行时间 (ToF) 或激光扫描仪,是一种探测物体并测量其距离的检测方式。这一技术


全固态激光雷达为什么迟迟未来?其技术难点是什么?
相比,激光雷达不受光线的影响,探测距离更远、精度更高、抗干扰能力更强。 上图示例为车载激光雷达采集到的三维点云。最早应用于无人车的机械式激光雷达借助电机驱动旋转镜体,实现360度水平扫
FMCW激光雷达,加速落地工业场景
产品融合实时测速、无GPS高精度定位、全维建图、图像级分辨率及原生抗干扰能力,为智能工业与行业机器人领域注入强劲动力。 据介绍,FMCW技术应用在球形激光雷达中,有以下优势: 动静分离,决策优化:FMCW技术赋予激光雷达
SPAD席卷车载激光雷达市场
,SiPM对于目前主流200线以内的激光雷达更具优势,这是从产品定义的角度考虑。 而从行业的趋势来看,像禾赛、速腾聚创等头部厂商聚焦数字化激光雷达的路线表明,SPAD正在取代SiPM成为激光雷达的接收端传感器。 SiPM



评论