 激光雷达如何快速捕捉环境细节
激光雷达如何快速捕捉环境细节

在低速无人驾驶应用领域,激光雷达的细节捕捉需要更加精准。
近几年,特定场景的低速无人驾驶应用正在快速推进。
作为核心传感器的激光雷达,其产品成熟度对低速无人驾驶落地应用至关重要,并且相对自动驾驶车辆上所使用的雷达产品来说,对环境细节的检测要求要来的更高。
就那服务机器人市场来说,它的工作环境相对于汽车来说,要复杂许多。它需要考虑的环境因素更加多样化和复杂化,因此需要更高的精度和分辨率,要做出的应对也需要更加快速,总的来说需要激光雷达更“聪明”。
那么激光雷达如何快速捕捉环境细节?思岚推出的RPLIDAR S2就可以给出答案。
32000Hz采样频率,扫描更精准
机器人在通过激光雷达扫描测距时,越高的采样频率,即一秒内获得更多次的测距数据,可以获得更高质量更细节的点云图,帮助机器人更好的建图导航。
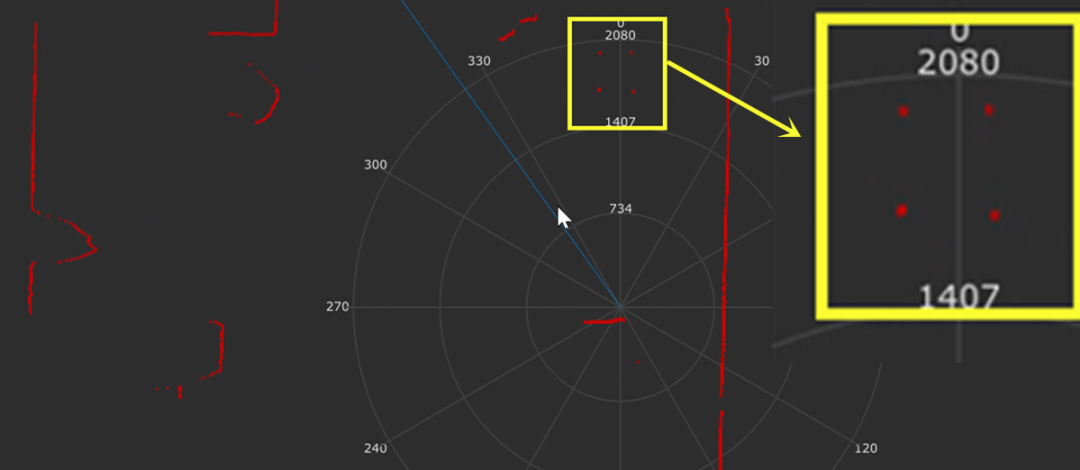
在提升了软件算法和内部硬件结构之后,RPLIDAR S2拥有32K的采样频率,单看数字大家可能没有概念,直接上对比图:
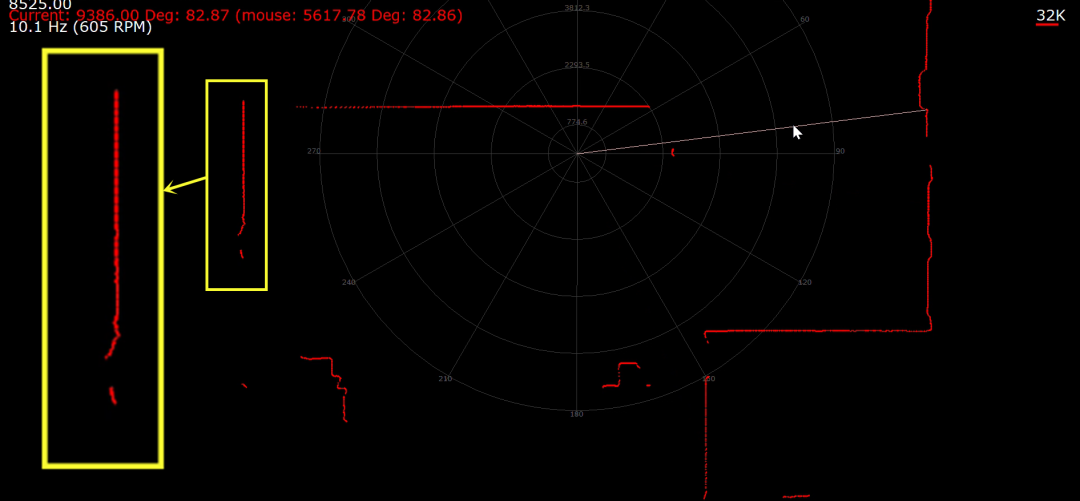
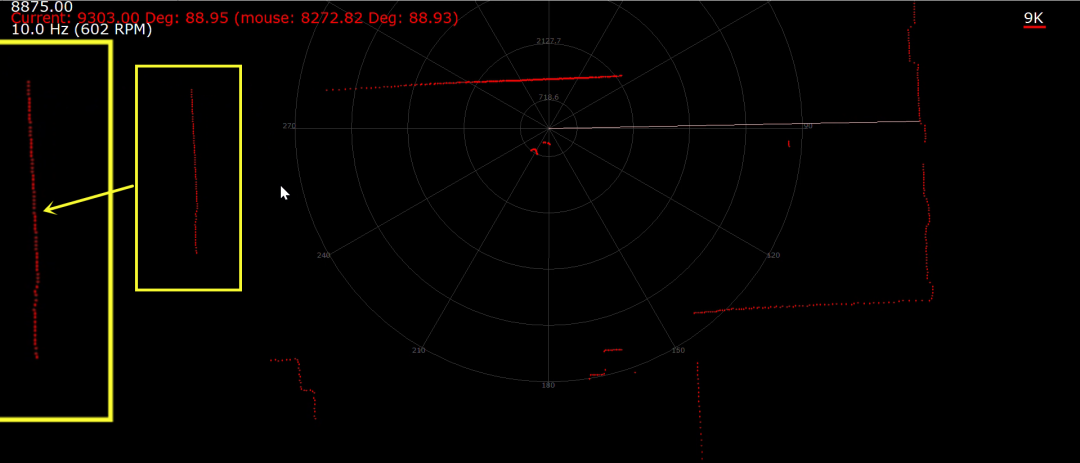
▲32k采样频率VS9.2k采样频率
对比结果显而易见,32k采样频率的点云图肉眼可见的更加清晰。而机器人在行走中,约明显密集的点云正是它可以自主避障,畅通无阻的关键。
优异的测距精度,细节跑不掉
要捕捉更多细节,就对测距精度有更高的要求。一些小物体因为体积太小而被忽略、一些反射率的物体检测不出等普通激光雷达无法解决的问题在S2这都完全不是问题!
话不多说,我们直接上图来看:
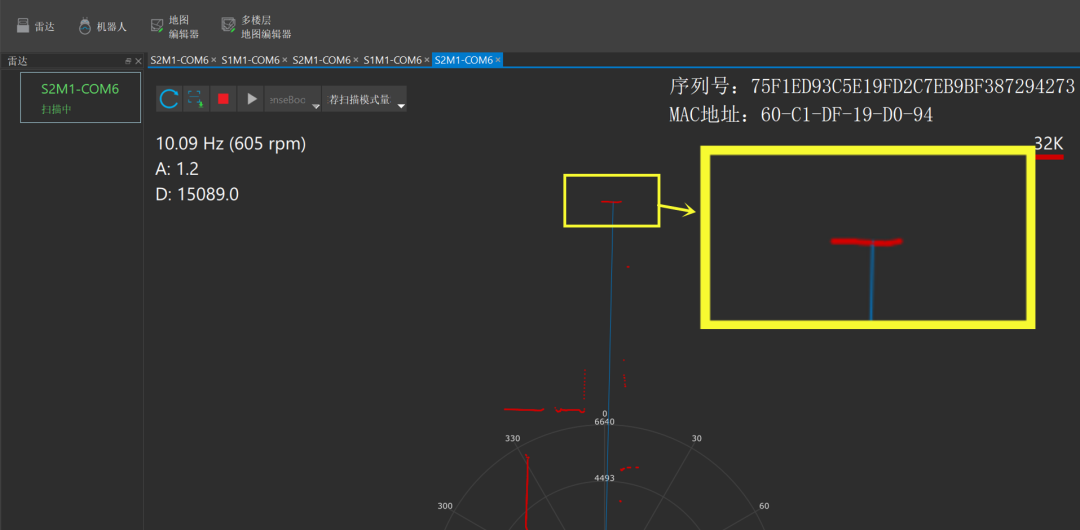
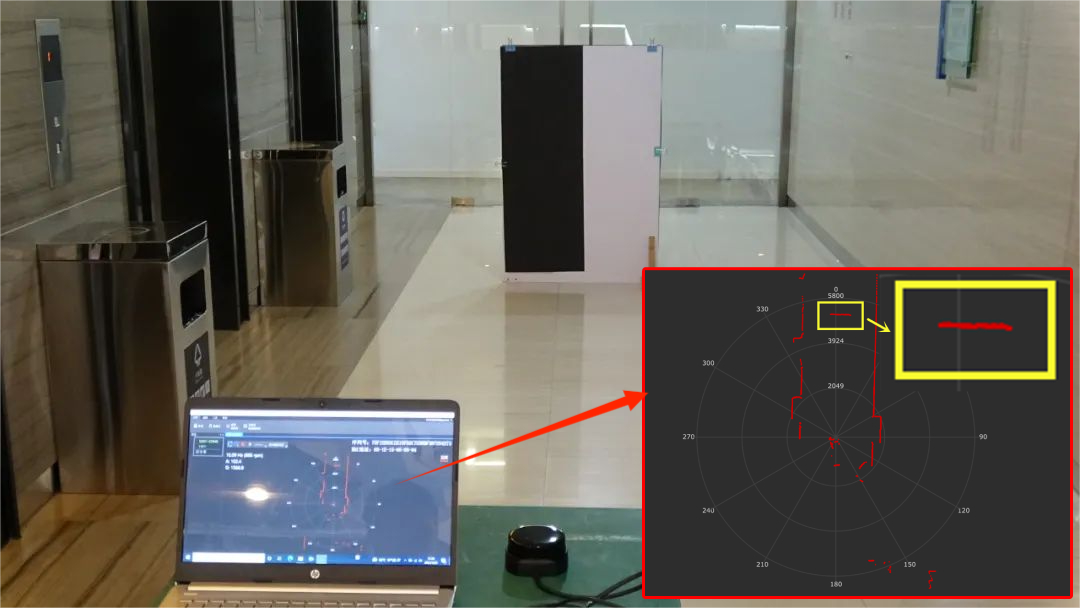
▲ S2测量15m处的黑色物体效果
▲ S2 测量黑白物体不分层
▲ S2 细小物体检出效果
不管是远距离的小物体还是难以检测的黑色物体,可以看到检测出的点云都十分明显,也就是说机器人在行走过程中完全可以检测到所处环境中的细节之处,有效避免行走过程中的碰撞。
强抗光和强防护,室内外可用
激光雷达在扫描测距时,会遇到很多的障碍,想要走出室内不但要考虑室外环境光的干扰,还要防尘防水。S2不但做到了在室外80K lux阳光下可以正常工作,防护等级也达到了IP65,因此S2不但可以用于室内服务机器人应用,也满足了室外服务机器人的使用要求。
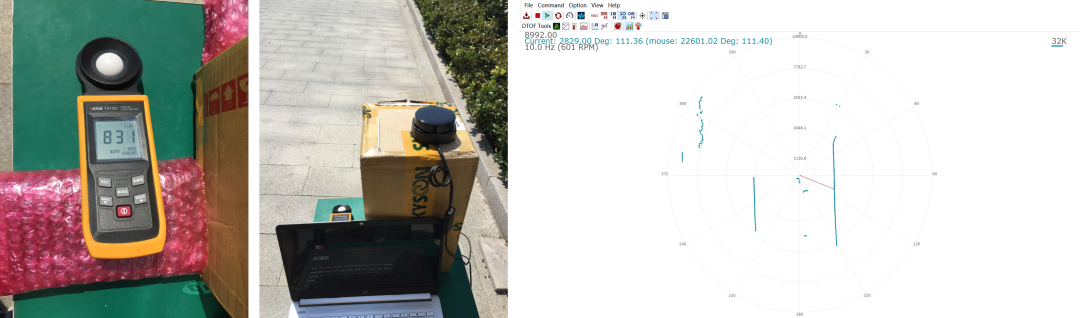
▲ S2在室外80K lux阳光下正常工作
激光雷达在服务机器人市场的应用中,不仅需要检测出更细节、更复杂的环境,防干扰要求也非常高。性能优越加上接口丰富,可快速进行二次开发,这就是行业内很多的机器人厂商愿意选择思岚的S2激光雷达的原因。
并且,正因为S2的优越性能,它的应用场景也十分广泛,不但可以用在服务机器人上,还可以应用于AGV场景,无人机,低速无人车等场景。
综上所述,RPLIDAR S2综合性能极高,而且性价比也是非常香呢!
-
机器人
+关注
关注
213文章
31432浏览量
223605 -
激光雷达
+关注
关注
982文章
4540浏览量
197069 -
无人驾驶
+关注
关注
100文章
4308浏览量
127086
原文标题:更“聪明”的激光雷达,如何快速捕捉环境细节?
文章出处:【微信号:slamtec-sh,微信公众号:思岚科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
固态激光雷达参数以及避障视频
灰尘是如何影响激光雷达识别效果的?

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?

中科亿海微SoM模组——激光雷达控制板

华为,激光雷达第一! 车载激光雷达市场的“隐形冠军”

自动驾驶激光雷达可以安装在哪些位置?

全固态激光雷达为什么迟迟未来?其技术难点是什么?
SPAD席卷车载激光雷达市场
自动驾驶激光雷达之间会相互干扰吗?
超酷的树莓派激光雷达扫描仪!

激光雷达(LiDAR)技术方案与工作原理全解析

自动驾驶激光雷达:原理、类型与应用梳理




评论