 i.MX RT1170上串行NOR Flash双程序可交替启动设计
i.MX RT1170上串行NOR Flash双程序可交替启动设计

在前一篇文章 《i.MX RT1060/1010上串行NOR Flash冗余程序启动设计》里,我详细介绍了i.MX RT10xx上的冗余程序启动设计,本质上这就是个双备份程序启动, NORFlash里存两份一样的image,物理地址靠前的image 0启动失效就继续启动后面的image 1,多一层保障。
i.MX RT1170是区别于i.MX RT10xx的第二代架构,性能/功能更加强大,其在继承 i.MX RT10xx冗余程序启动的基础上,新增了双程序可交替启动设计,今天我们就来聊聊这个话题:
一、初识双程序可交替启动
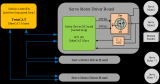
与i.MX RT10xx一样,这里要聊的还是在一片挂载在FlexSPI上的串行NOR Flash里做冗余/双程序设计,就是下图中的image L和image H,不涉及LPSPI接口Flash B里的image 2。
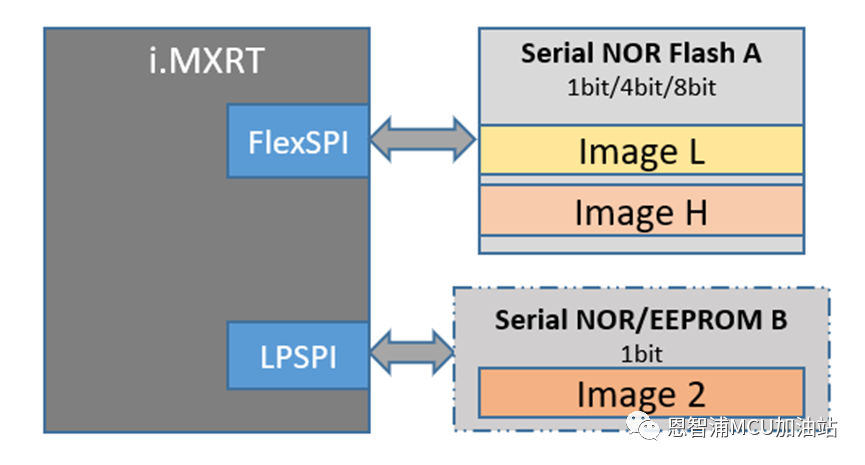
先说跟i.MX RT10xx上一样的冗余程序启动流程,i.MX RT1170上电先启动物理地址靠前的image L,如果image L被破坏了,则继续启动image H。
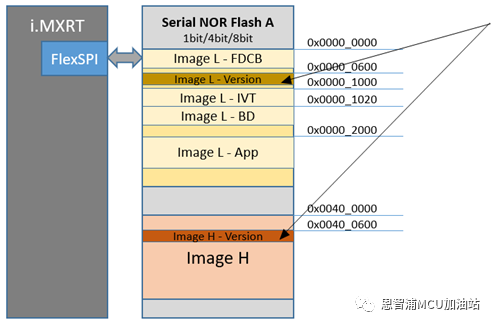
什么是双程序可交替启动呢?简单说就是物理地址靠前的image L并不总是上电首先启动的image,在i.MX RT1170上新增了如下原型的image version启动头(在固定偏移 0x600 处),芯片上电 BootROM 会尝试判断两个 image L/H 里的 version 头版本,高版本的 image 优先被启动。这种设计方便了 OTA 升级。
-
Note: 当image L/H中均不含有效version启动头时(img_ver 等于 0xFFFFFFFF,或者高低16bit不符合取反关系),双程序可交替启动特性就不生效,此时等效于冗余程序启动,image L 永远被优先启动。
{
uint16_tversion;//版本值
uint16_tinversion;//version值的取反(~version)
}img_ver_t;
二、回顾冗余程序启动
在测试双程序可交替启动新特性之前,还是先过一下冗余程序启动。按照文章《i.MX RT1060/1010上串行NOR Flash冗余程序启动设计》第2节里一模一样的方法,在恩智浦官方MIMXRT1170-EVK开发板上做测试,这个板子FlexSPI1上挂了两片Flash,默认连接的16MB QuadSPI Flash,还有一片 64MB OctalFlash(需要做板子改动才能使能)。
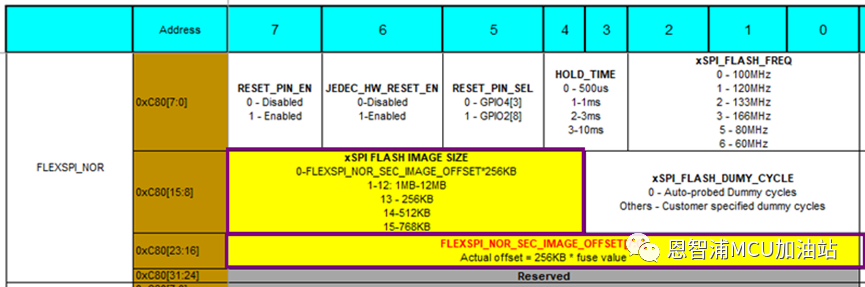
在 i.MX RT1170 fuse 里关于冗余程序启动的使能位定义与i.MX RT10xx上差不多,只不过 fuse 地址从 0x6E0 换到了0xC80。还是跟之前测试一样借助MCUBootUtility工具将 FLEXSPI_NOR_SEC_IMAGE_OFFSET 烧录为 0x10,xSPI_FLASH_IMAGE_SIZE 保持默认 0,即第二份 image 偏移地址在 Flash 0x400000(4MB)处,最大 image 长度也是4MB。
继续用SDK_2.11.0_MIMXRT1170-EVKoardsevkmimxrt1170demo_appsled_blinkycm7iarflexspi_nor_debug例程生成两个稍微不一样的 image,闪灯间隔时间一个是200ms(image L - iled_blinky_cm7_delay200ms.bin),另一个是 2s(image H - iled_blinky_cm7_delay2s.bin)。在 MCUBootUtility 工具主界面下使用 All-In-One 操作将 image L 下载进 Flash(baseaddress 设为 0x30000400),使用通用编程器界面 Write 操作将 image H 也下载进 Flash(Start 设为0x400400)。
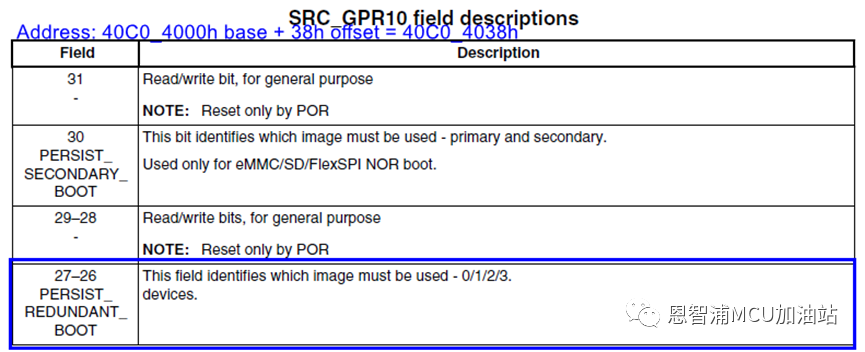
现在Flash 里有了两份 image,当第一份 image 启动失败后,i.MX RT1170 BootROM 不是立刻去执行下一份 image ,还是那个取巧的方法,在一个软复位不置位的寄存器里(SRC_GPR10)标记当前状态,然后调用 NVIC_SystemReset() 重新进入 BootROM 执行。不过此时标记位从 GPR10[30] 换到了 GPR10[27:26],虽然是 2bit 状态,但设值 1/2/3 等效于设值 1,因为对于串行 NOR Flash 最多就是两份 image。这时候如果你想挂 J-Link 改写 SRC_GPR10 去做快速验证恐怕无法如愿,原因请看《i.MX RT1170上用J-Link连接复位后PC总是停在0x223104》。
所以在i.MX RT1170上只能老老实实做破坏 image 完整性的动作来验证冗余程序启动,经实测其效果与i.MX RT10xx 是完全一致的。
三、实测双程序可交替启动
现在我们开始实测双程序可交替启动,主要的工作量就是为 image L 和 image H 添加 version 启动头,并且将它们分别下载进 Flash。因为我们想验证物理地址靠后的 image H 比 image L 优先启动(冗余程序启动做不到这点),所以需要将 image H 的 version 头版本设高一点。
3.1 为 image 添加version 启动头
还是在SDK_2.11.0_MIMXRT1170-EVKoardsevkmimxrt1170demo_appsled_blinkycm7iarflexspi_nor_debug例程基础上,首先在工程链接文件 MIMXRT1176xxxxx_cm7_flexspi_nor.icf 添加如下语句,指定 .img_ver 段的位置。
define symbol m_boot_img_ver_start = 0x30000600;
place at address mem: m_boot_img_ver_start { section .img_ver };
然后在工程随便一个源文件里添加如下常量 s_bt_img_l_ver 定义,这个 image 闪灯间隔时间是 200ms(image L -iled_blinky_cm7_delay200ms_ver0.bin),版本是 0x0000(注意编译链接工程时为防止 s_bt_img_l_ver 被优化,可以在工程选项 Linker / Input /Keep symbols 里将其添加进去)。
constimg_ver_ts_bt_img_l_ver@".img_ver"={
.version=0x0000,
.inversion=~0x0000,
};
同样的工程,再生成另一个闪灯间隔时间为 2s(image H -iled_blinky_cm7_delay2s_ver1.bin) 的 image 时使用如下常量s_bt_img_h_ver 定义,版本是 0x0001。
constimg_ver_ts_bt_img_h_ver@".img_ver"={
.version=0x0001,
.inversion=~0x0001,
};
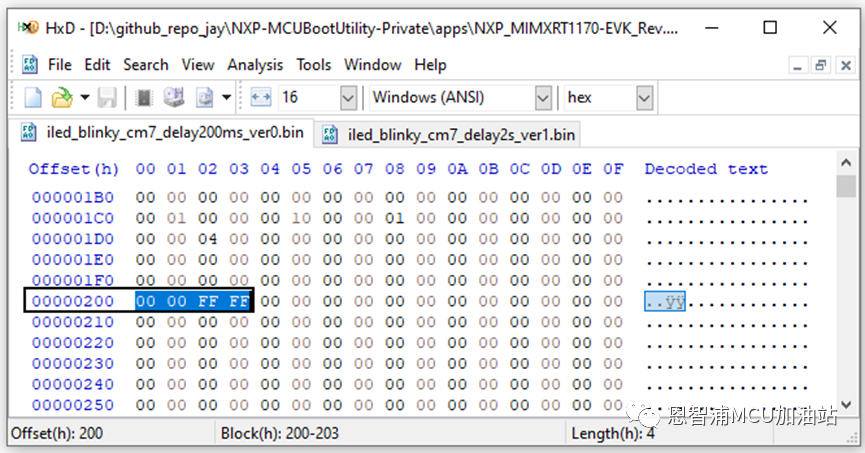
当然如果你嫌上述方法繁琐,也可以直接在最终 image binary 文件上做修改(注意 offset 位置一定要找对,i.MX RT1170 SDK XIP binary 文件起始数据对应 Flash 偏移是 0x400,因此文件中 0x200 处才对应 Flash 偏移 0x600):
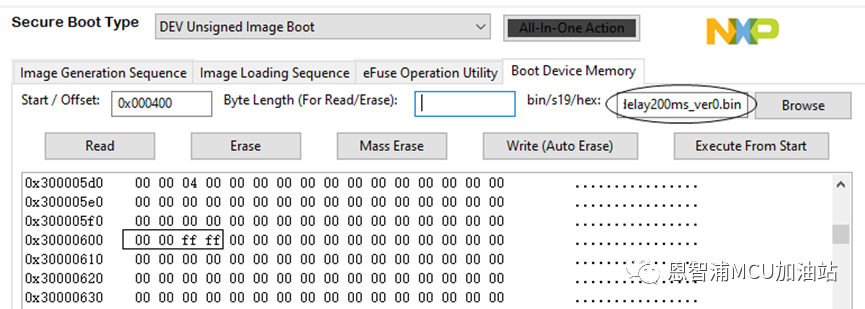
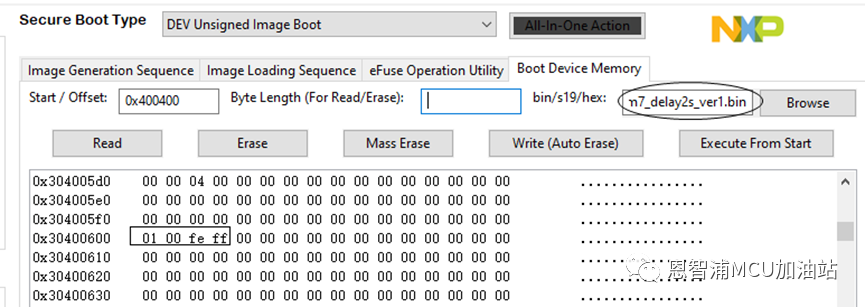
现在需要借助 MCUBootUtility 工具的通用编程器功能分别将两个含 version 头的 image L/H 下载进 Flash。这里需要注意的是此时 image L 无法再通过主界面 All-In-One 操作来下载了,因为工具 v3.4 版本及以下没有对 version 启动头做识别处理,因此会丢掉 version 头数据(这个考虑会在 v4.0 之后加入支持)。
两个 image下载完成,一切工作就结束了,这时候你调整芯片启动模式到 2'b10 - Flash boot,给板卡重新上电,应该可以看到 image H 正在执行。
3.3 BootROM中判断version的逻辑
BootROM中关于 version 启动头是否有效以及版本高低判断逻辑其实是有一点复杂的,这里把具体代码分享给大家,方便大家为 image 设置有效的 version 头以及正确使能这个双程序可交替启动特性。
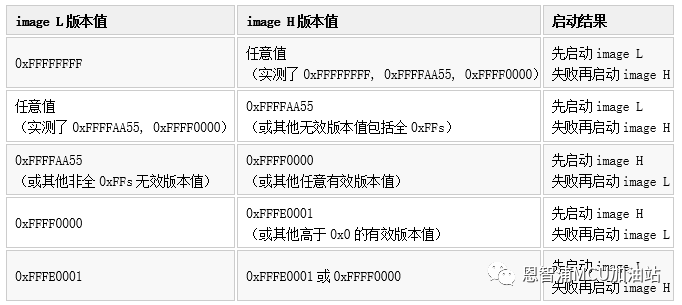
判断逻辑代码主要意思是仅当 image L 的版本不是 0xFFFFFFFF 且 image H 的版本是有效的(img_ver 高低16bit符合取反关系)情况下,如果 image L 版本无效或者 image L 版本有效但比 image H 版本低,则物理地址靠后的 image H 优先启动。除此以外其余情况,一律是物理地址靠前的 image L 优先启动。
uint32_t image_l_base = FlexSPIx_AMBA_BASE
uint32_t image_h_base = FlexSPIx_AMBA_BASE + FLEXSPI_NOR_SEC_IMAGE_OFFSET
uint32_t get_image_index(void)
{
uint32_t redundant_boot = ((SRC->GPR[9] & 0x0C000000) >> 26);
static uint32_t image_index[] = { 0, 0 };
img_ver_t image_l_version = *(img_ver_t *)(image_l_base + 0x600);
img_ver_t image_h_version = *(img_ver_t *)(image_h_base + 0x600);
if ((image_l_version.version != 0xFFFFu || image_l_version.inversion != 0xFFFFu) &&
((0xFFFFu & image_h_version.version) == (0xFFFFu ^ image_h_version.inversion)) &&
((0xFFFFu & image_l_version.version) != (0xFFFFu ^ image_l_version.inversion) || (image_l_version.version < image_h_version.version)))
{
image_index[0] = 1;
}
else
{
image_index[1] = 1;
}
return image_index[redundant_boot];
}
痞子衡在MIMXRT1170-EVK 开发板上对image 版本设置情况也做了比较全面的实测,测试结果如下:
四、一些关于image的注意事项
- 虽然文中所有的测试均是针对 XIP image,但这个冗余程序/双程序可交替启动特性对于 Non-XIP image 也同样适用。
- 如果是 XIP image,其链接地址不一定要固定在偏移 0x2000 处,因为 IVT 的存在,其是可以链接在偏移 0x2000 之后的任意位置的。
- 如果是 Non-XIP image,在 SDK 包里无法直接生成含启动头的 Non-XIP image binary,这时候可以先使用 MCUBootUtility 主界面的 All-In-One 操作下载一次 image,再通过通用编程器界面 Read 操作读回来便是含启动头的 Non-XIP image binary。
审核编辑 :李倩
-
冗余
+关注
关注
1文章
114浏览量
21374 -
串行
+关注
关注
0文章
256浏览量
35545
原文标题:i.MX RT1170上串行NOR Flash双程序可交替启动设计
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于恩智浦 RT1170 i.MX 并行 RGB 显示器示例参数
自定义 i.MX RT1176AVMA8板上的安全配置工具 UART 连接失败的原因?
如何在 i.MX RT1050 上实现两个镜像(引导加载程序应用程序)的双 HAB 身份验证?
请问如何在 i.MX RT1050 上从多个起始地址运行相同的引导加载程序?
如何制作 rt117x 闪存驱动程序?
探索i.MX RT1180:高性能处理器的技术剖析与应用指南
恩智浦i.MX RT1170 MCU如何变革两轮车骑行体验

FRDM i.MX 9平台选型指南:FRDM i.MX 9系列开发平台解析

i.MX RT1180实现EtherCAT+伺服控制的终极实践
RT1180 XMCD的特点和使用注意事项

恩智浦i.MX RT1180跨界处理器如何选型

恩智浦MCU方案 单颗i.MX RT1180实现EtherCAT+伺服控制
基于恩智浦i.MX RT芯片内部RAM运行LVGL工程

如何实现安卓与恩智浦i.MX RT1170的无线投屏与控制

i.MX RT系列中FlexSPI DQS信号引脚配置GPIO方法




评论