 PLC安全门两区域间光电-故障控制改进
PLC安全门两区域间光电-故障控制改进

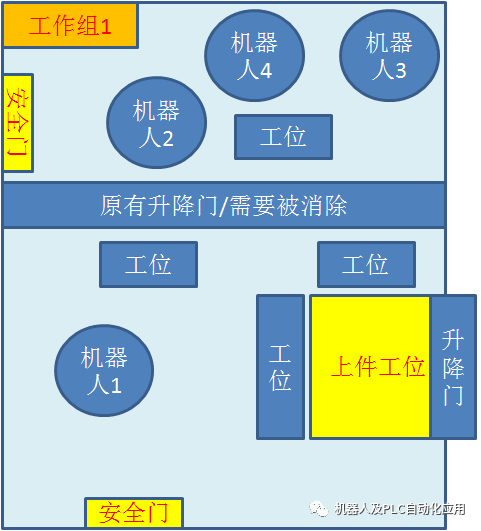
原始程序布局状态
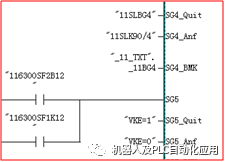
改进后的布局状态:
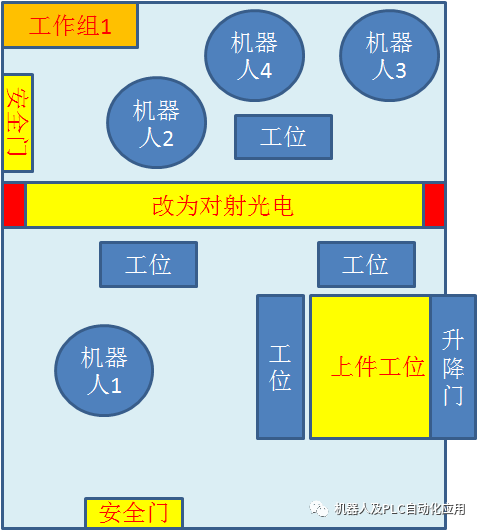
1.将机器人E14机器人安全加入光电及升降门信号.
2.机器人安全门回路加入光电和升降门信号.
3.误闯光电会引起工作组1报安全门故障.
1.将机器人E14机器人安全加入光电及升降门信号.
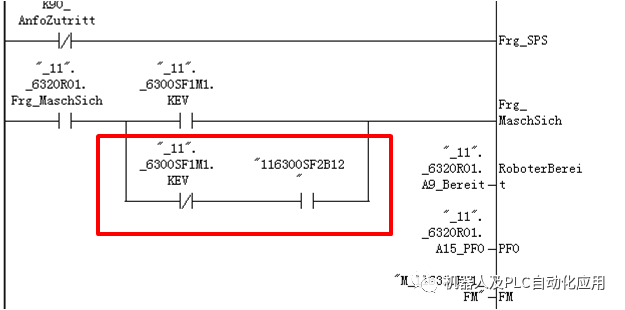
编程速度快,改动最小,影响范围小,安全系数低.
2.机器人安全门回路加入光电和升降门信号.
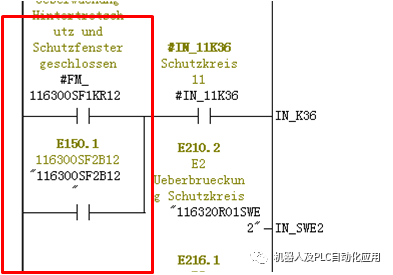
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止.
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险.
3.误闯光电会引起工作组1报安全门故障.
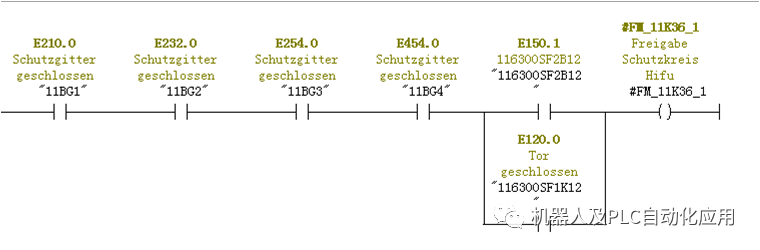
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障.
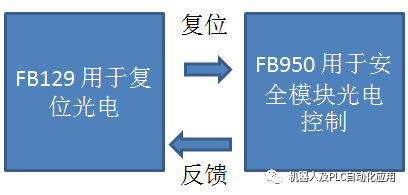
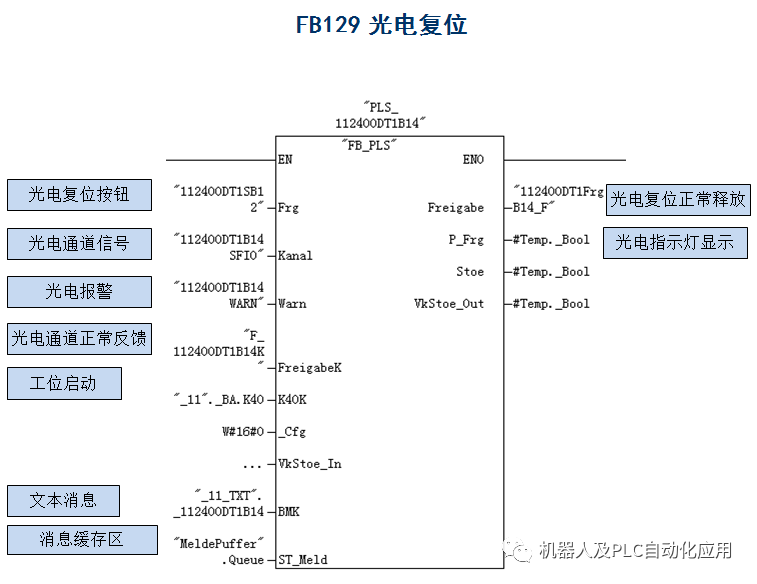
光电复位示意图:
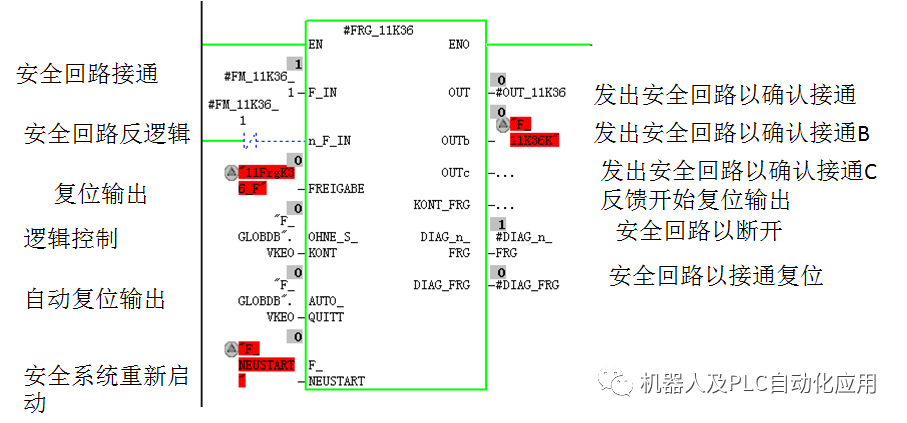
FB950接口设置
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31442浏览量
223654 -
光电
+关注
关注
8文章
860浏览量
83225 -
plc
+关注
关注
5052文章
14806浏览量
488580
原文标题:PLC安全门两区域间光电-故障控制改进
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
港口码头门机视频及PLC信号无线传输应用方案
■ 前言 门座式起重机作为港口作业流程中的核心装卸设备,其控制与监控系统的通信质量直接影响装卸效率和作业安全。工业无线通讯设备为港口装卸业务的智能化升级提供了可靠、稳定的通讯保障。 ■ 项目背景

台达 DVP 系列 PLC 借助以太网通讯处理器实现与 MCGS 触摸屏通讯的配置案例(设备检修场景)
,仅支持检修状态查看与基础启停操作。随着设备全生命周期管理要求提升,原有系统无法满足检修进度、电机电流、润滑压力、故障代码、安全门状态等参数实时上传与追溯,且台达 DVP 本体无标准以太网接口,无法接入企业设备管理平台(EAM)。整体更换

台达DVP系列PLC借助以太网通讯处理器实现与MCGS触摸屏通讯的配置案例(设备检修场景)
检修状态查看与基础启停操作。随着设备全生命周期管理要求提升,原有系统无法满足检修进度、电机电流、润滑压力、故障代码、安全门状态等参数实时上传与追溯,且台达DVP本体无标准以太网接口,无法接入企业设备管理平台(EAM)。整体更换控制

CC-Link IE转EtherNet/IP 工业 PLC 网关简化运维缩短故障排查时间
L73 PLC ,基于 EtherNet/IP 协议 。作为整线 “大脑”,负责整体生产节拍调度、AGV 调度指挥、全线安全联锁控制,以及总装工艺数据的下发与汇总。 · 分区执行单元:底盘装配、上装合装
PLC智能网关在化工安全监测的作用
低下,还存在人员进入高危区域的安全风险,一旦设备出现故障未及时发现,极易引发安全事故与经济损失。 针对化工行业的特殊需求,物通博联(WideIOT)提供

耐电弧试验仪的电气安全设计:高压隔离与故障保护电路原理
耐电弧试验仪因需产生高压环境开展检测,其电气安全设计直接关系到操作人员的人身安全与设备的稳定运行。其中,高压隔离与故障保护电路是电气安全设计的两

PLC电机远程控制物联网解决方案
目前,越来越多的控制线路都采用可编程逻辑控制器与继电器结合来实现控制和保护,能够显著降低故障率与风险。某车间现有四台电机,均由PLC+继电器
无法将 XOM 设置为非安全区域,为什么?
在 M2351 中,我将非安全边界设置为0x40000。
非安全区域应为 0x10040000 ~ 0x1007ffff。
然后,我将 XOM 设置为 0x10060000,但它失败了。
非安全区域不支持 M2351 中的 XO
发表于 08-27 07:01
汽车区域控制器方案指南
向软件定义汽车 (SDV) 的转型促使汽车制造商不断创新,在区域控制器中集成受保护的半导体开关。电子保险丝和 SmartFET 可为负载、传感器和执行器提供保护,从而提高功能安全性,更好地应对功能

PLC远程维护平台有什么优点
故障时,技术人员需要赶赴现场排查,耗时费力。而远程维护平台能让技术人员在第一时间获取故障信息,通过远程登录PLC设备,快速定位和解决问题。例如,某工厂的

详解电动汽车的区域控制架构
向软件定义汽车 (SDV) 的转型促使汽车制造商不断创新,在区域控制器中集成受保护的半导体开关。电子保险丝和 SmartFET 可为负载、传感器和执行器提供保护,从而提高功能安全性,更好地应对功能

PLC常见的故障和因素及5大排除流程图
PLC(可编程逻辑控制器)作为工业自动化控制的核心设备,其稳定运行直接关系到生产线的效率与安全。然而,在实际应用中,PLC系统难免会出现各种

PLC产品故障问题测试的四个部分
在工业自动化控制系统中,PLC(可编程逻辑控制器)作为核心控制设备,其稳定性和可靠性直接影响整个生产线的运行效率。然而,在实际应用中,PLC




评论