 液压臂的制作教程
液压臂的制作教程

步骤1:平台和底座

对于平台,我使用了圆桌杯垫因为很容易将大头钉/钉子刺入。手臂的旋转底座由锡盖制成,我在中间钻了一个孔。我使用了一个销子和一个perler珠子(perler珠子作为间隔物)将基座固定到平台上,以使其旋转。
第2步:开始武装
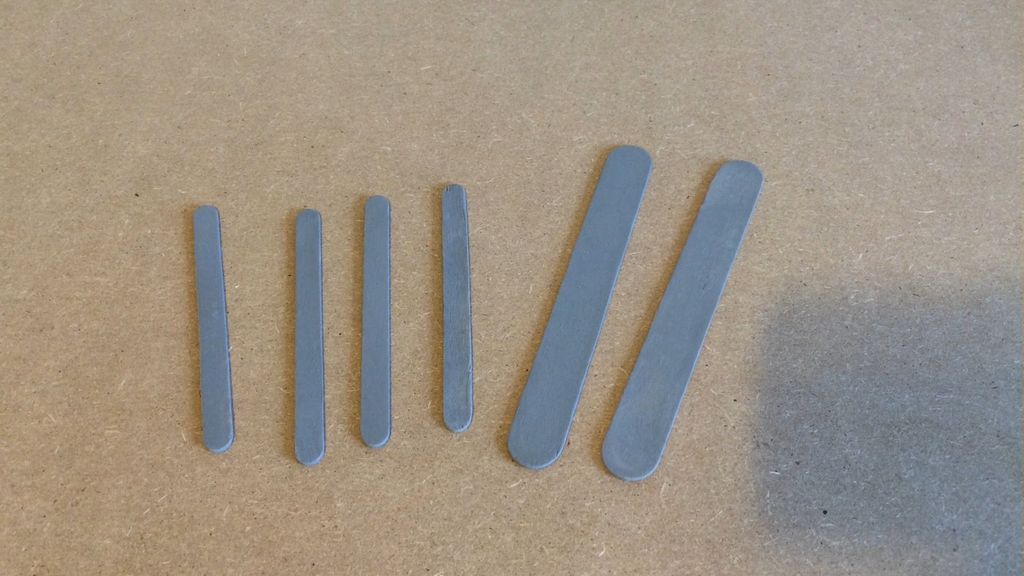


我用了两个大棒棒糖棍和四个标准尺寸的棍棒。我决定将它们涂成灰色。对于更大的冰棍,我在末端钻了两个相距1英寸的孔。孔必须足够大,以使钉子能够穿过。我还切碎了大棒的底部。或小棒子,我在末端钻了两个相距1个半英寸的孔,在另一侧钻了另一个孔。
步骤3:液压和机械臂

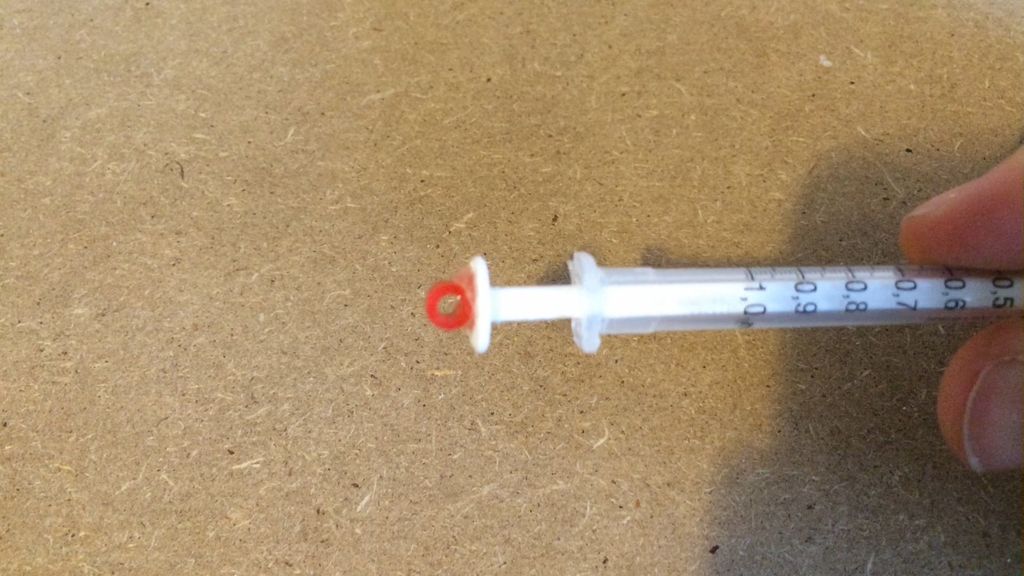

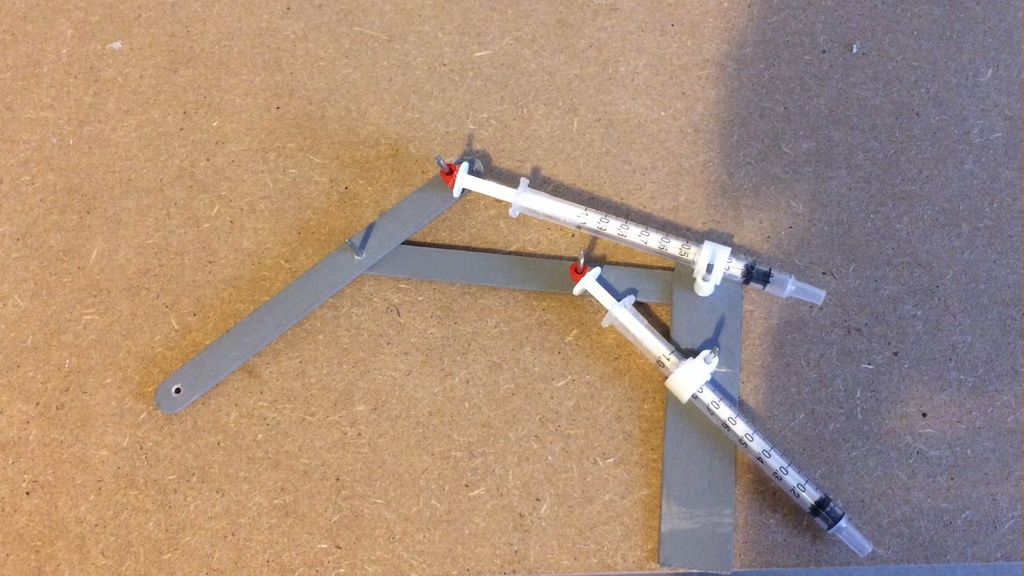

我如图所示用指甲将手臂的前半部分拼合在一起并准备了液压系统。我用小的1ml注射器作为液压装置。我将perler压条连接到每个液压装置的顶部,并将电缆整齐地连接到油管。
佩勒(Perler)压条中的插槽和整洁的电缆将使液压装置自由移动。第一个液压装置将电缆整理整齐地靠近管子的顶端,第二个液压装置将其翻转过来并粘合在底部附近。然后,如上图所示,我将液压系统放在指甲上。然后,我将另一根棒棒糖拼凑在手臂的另一半上。
步骤4:连接手臂和电磁体


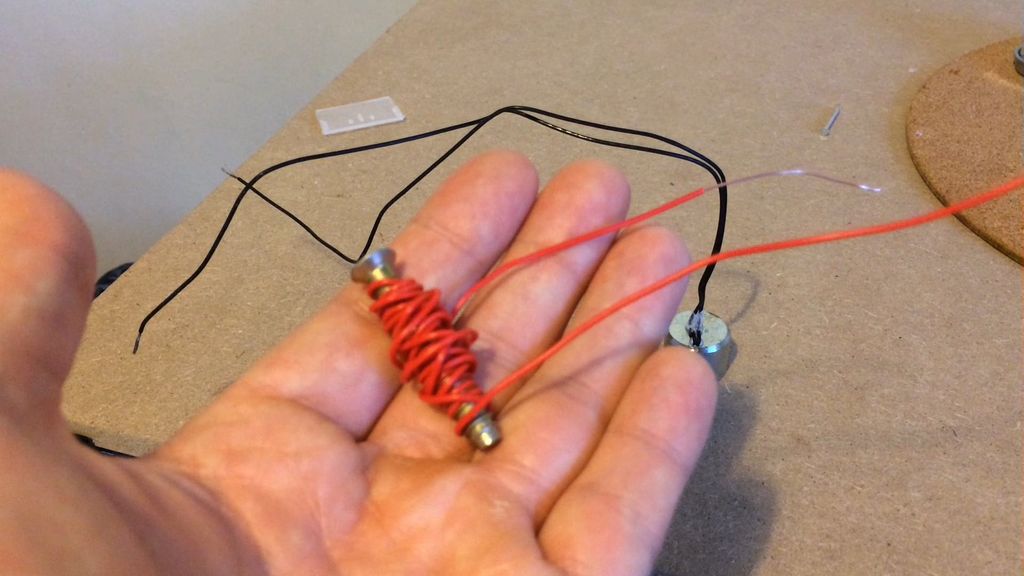

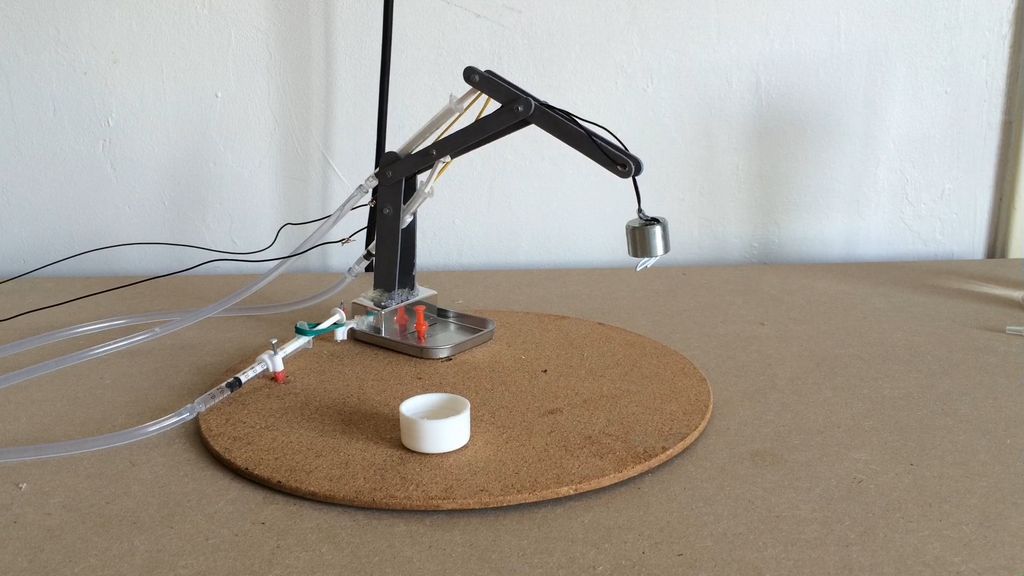
我只是使用热胶将手臂连接到旋转底座上。我使用了一个方形的须后盖,以使臂高一些,以使液压油管能够安装在臂后。对于起重设备,我认为添加电磁体会很酷,因此我从当地的电子产品商店购买了一个。可以通过在金属螺钉上绕一些线来始终制成DIY电磁体。如图所示,我将磁铁穿到手臂的末端,然后将电线塞向背面。
第5步:添加旋转液压



电线整齐到锡的边缘。我准备了另一个注射器,与其他注射器一样,使用另一个佩勒珠子作为垫片将其钉在平台上。然后,我用钉子将液压系统连接到基座上。
步骤6:完成液压系统和调整
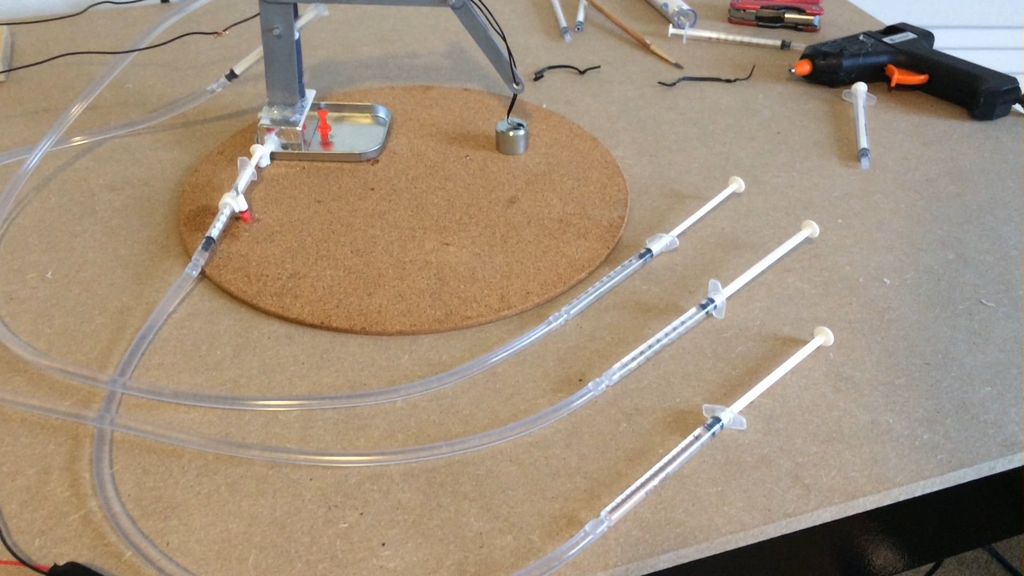


我用了3个长度为3mm的软管将臂连接到控制器注射器。用水填充管子可能非常棘手。我拉出控制器注射器的手柄,将水吸入管中,然后将手指握在注射器上,以使水留在管线中。然后,我将试管连接到手臂上,然后将手柄放回另一个注射器中。
一旦连接了所有液压系统,我就将电池和一个小开关连接到了磁铁。如图所示,我还向手臂添加了橡皮筋,以使手臂获得更好的力矩。
第7步:完成
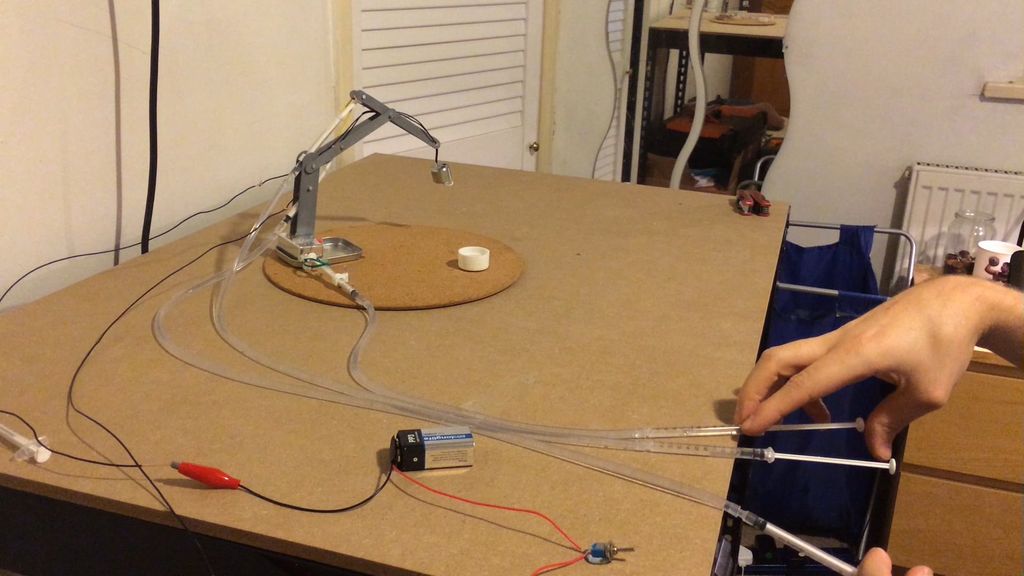
使用注射器控制手臂并打开电磁铁和关闭。很好玩!
-
液压
+关注
关注
4文章
214浏览量
21494
发布评论请先 登录

基于FM-2D氟醚橡胶改性的飞机液压油箱压力调节器失效抑制机理研究

SAE J1939转Profinet 协议转换网关实现智能液压挖掘机精准作业与节能运行

CR-2450型小型液压纽扣电池封装机

什么是 GNSS 杠杆臂,它在 GNSS/INS 传感器融合算法中起什么作用?

传统测试设备的局限与协作机械臂的破局

万米高空的温度博弈:航空高低温液压系统的生存之道

从“跟跑”到“并跑”:湖南泰德航空以创新引擎驱动液压技术国产化
协作机械臂产品介绍
求助 我需要一种可以在液压油中运行的微型步进电机
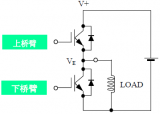
IGBT模块上桥臂驱动电路原理详解
GZCOM-NET:为机械臂测试带来高效无线解决方案!

双电机驱动数字液压阀的研发
液压缸磁致伸缩位移传感器技术解析与应用优势




评论