好的,我们来详细分析一下MEMS陀螺仪和光纤陀螺(FOG)的不同之处以及是否可以相互取代。
核心差异:工作原理完全不同
-
MEMS陀螺仪:
- 原理: 基于科里奥利效应。它使用微小的硅制(或其他材料)振动结构(音叉、振梁或谐振环)。当这个结构在平面内振动时,如果绕垂直于振动平面的轴发生旋转,科里奥利力会使结构产生另一个正交方向上的振动。检测这个感应振动的位移或电容变化,就能计算出角速度。
- 结构: 硅晶圆上利用微机电系统技术蚀刻加工的微型机械结构(传感器核心),通常与驱动和检测电路集成在同一芯片上。
- 驱动/检测: 静电驱动振动,电容或压阻检测运动。
- 核心材料: 硅、石英等。
-
光纤陀螺:
- 原理: 基于萨格纳克效应,这是狭义相对论的直接结果。将同一光源发出的光束分成两束,分别沿缠绕成线圈(几百米到几公里长)的光纤环以顺时针和逆时针方向传播。当光纤环(即载体)在垂直于环面的轴发生旋转时,两束光在光纤中传播的光程会产生微小差异(旋转越快,差异越大)。通过干涉仪测量这两束光重新汇合时的相位差(干涉条纹移动),就能精确计算出旋转角速度。
- 结构: 主要由光源(通常是超辐射发光二极管SLD或激光二极管LD)、光纤耦合器(分束/合束)、专用于旋转传感的长光纤环(通常缠绕在热膨胀系数低的线圈架上)、光电探测器以及信号处理电路组成。
- 驱动/检测: 光波传播及其干涉,光电转换。
- 核心材料: 特种光纤(如保偏光纤)、光学器件(光源、耦合器、探测器)。
关键性能对比及差异:
| 特性 | MEMS陀螺仪 | 光纤陀螺 |
|---|---|---|
| 工作原理 | 科里奥利效应 (微机械振动) | 萨格纳克效应 (光学干涉) |
| 尺寸/重量 | 极小 (毫米级芯片, 含封装) | 较大 (几厘米到十几厘米立方, 含线圈架、光源等) |
| 功耗 | 极低 (毫瓦级,甚至微瓦级) | 较高 (百毫瓦级到瓦级,主要光源耗电) |
| 成本 | 非常低 (适合大规模量产消费级器件) | 较高 (特别是中高精度等级,材料、工艺复杂) |
| 核心精度 (零偏稳定性) | 较低 -> 中等 (从1000°/h到 <1°/h 不等) | 中等 -> 极高 (从10°/h到 <0.001°/h 不等) |
| 量程 (动态范围) | 极高 (可达±2000°/s) | 中等 -> 高 (通常±1000°/s或更低) |
| 带宽 (响应速度) | 高 (可达kHz级) | 中低 (通常几十Hz到几百Hz) |
| 启动时间 | 极快 (毫秒级) | 较慢 (秒级,需光源稳定) |
| 抗冲击振动 | 较好 -> 很好 (集成式设计,现代工艺坚固) | 很好 -> 优秀 (无活动部件,全固态结构) |
| 温度敏感性 | 较高 (性能受温度影响明显,需温度补偿) | 较低 (性能稳定性好,但仍需优化设计抑制温漂) |
| 可靠性/寿命 | 良好 (运动部件微小,现代封装技术成熟) | 优秀 (无机械磨损,光纤自身寿命长) |
| 复杂性 | 低 (电子器件集成度高) | 高 (光学系统相对复杂) |
| 主要应用领域 | 消费电子(手机、游戏机)、汽车(ESP, IMU)、工业机器人(稳定平台)、无人机、中低精度惯性导航 | 战术级/导航级惯性导航(航空、航海、陆地车辆)、卫星通信天线稳定、精确制导武器、平台稳定、石油测斜 |
是否可以相互取代?
- 在低精度、低成本、小尺寸、低功耗应用中:MEMS陀螺仪是绝对的主流和首选。
- 可以取代:在这些领域,MEMS已经完全取代了大部分早期使用的低端机械陀螺和部分低端光学陀螺。光纤陀螺过高的成本、尺寸和功耗使其在这些领域没有竞争力。
- 例子: 智能手机的屏幕旋转、游戏手柄、运动手环、消费级无人机飞控、汽车电子稳定系统中的翻滚检测等。
- 在高精度导航和稳定应用中:光纤陀螺占据优势。
- 难以取代:对精度要求极高的场合(如远程飞机/船舶导航、精确打击武器、战略级平台),光纤陀螺(特别是中高精度型号)在零偏稳定性、长期稳定性等方面的优势非常显著,是当前的主流技术(取代了之前的环形激光陀螺和部分高精度机械陀螺)。
- MEMS的挑战:虽然MEMS技术在不断提高精度(已进入战术级领域),但要在零偏稳定性、标度因数线性度/稳定性、温度敏感性等关键指标上追上同等级的光纤陀螺,仍然面临材料和工艺上的巨大挑战,成本也会急剧上升。要达到导航级精度极其困难。
- 在战术级应用(中精度)中:存在竞争。
- 存在交集和竞争:对于精度要求中等的应用(如中档无人机、无人车导航、某些武器系统),战术级MEMS陀螺仪和低/中精度光纤陀螺仪形成竞争。
- 选择依据:这时需根据具体性能指标(精度、环境适应性)、成本、尺寸、功耗、供货周期等综合因素进行权衡。
- 选MEMs: 如果对成本、尺寸、功耗极其敏感,且可以接受略低的精度或通过辅助手段(如卫星导航)进行修正。
- 选FOG: 如果对精度和长期稳定性有硬性要求,或者在高低温、振动等恶劣环境下工作,即使付出更高的成本和更大功耗也值得。
结论:
MEMS陀螺仪和光纤陀螺仪是两种原理截然不同的角速率传感器。它们在性能、成本、尺寸和功耗上存在显著差异,面向的应用市场也有很大的区分:
- MEMS陀螺仪在消费电子、汽车电子以及要求尺寸小、成本低、功耗低的应用中占据主导地位,是光纤陀螺无法取代的。
- 光纤陀螺仪在中高端战术级、导航级和战略级惯性导航与稳定应用中,因其卓越的精度和稳定性,是MEMS陀螺目前难以全面取代的。
- 在战术级精度领域(中精度),两者存在竞争,选择取决于具体应用中对性能、成本、尺寸、功耗等因素的优先级。
因此,它们主要是一种互补关系而非简单的取代关系。技术的发展会模糊某些中间地带(如更高精度的MEMS进入战术级应用),但短期内各自的优势领域是相对稳定的。选择哪种技术完全取决于特定应用场景下最关键的指标要求。
MEMS陀螺仪正在取代光纤陀螺仪?
、处理与输出。 MEMS陀螺如何“感知”旋转? 别被名字迷惑!现代MEMS陀螺仪并非依靠传统陀螺的旋转飞轮。其核心原理是科里奥利力。想象一下: 芯片内部有微小的振动质量块(“驱动”方向振动)。 当整个器件发生旋转时,振动质量块会受到一个垂直方
2025-07-08 16:45:36
什么是MEMS陀螺仪?
ER-MG-056经济型MEMS陀螺仪,ER-MG-067高性能MEMS陀螺仪,导航级ER-MG2-50/100高性能寻北MEMS陀螺仪和ER-MG2-300/400高精度导航MEMS陀螺仪是我们最畅销的产品。
2023-07-07 10:16:47
光纤陀螺仪与旋转式陀螺仪的工作原理解析
光纤陀螺仪(FOGs)与常用于玩具中的旋转式陀螺仪类似,因为这两种陀螺仪都能测量物体的旋转。但这两种陀螺仪的工作机制却不同:光纤陀螺仪内部没有运动部件,而是用光进行测量。
2019-10-10 15:22:31
ADI公司新款MEMS陀螺仪的特性分析
本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。
2019-07-16 06:12:00
高精度MEMS陀螺仪或将取代光纤陀螺仪
近几年来,MEMS惯性传感器发展迅速,精度不断提高。虽然精度相比光纤陀螺、激光陀螺仍有很大差距,但是其价格低、体积小、重量轻,使MEMS惯性导航系统在惯性导航系统中发挥重要作用。
2020-07-14 15:32:55
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法。
2023-08-21 14:40:37
什么是光纤陀螺仪?陀螺仪有哪些作用?

陀螺仪是干什么用的?陀螺仪是用来感知和测量物体旋转的一个传感器。简单来说,它可以帮助设备知道自己当前的角度和运动方向。通常,我们会在智能手机、无人机、VR设备等科技产品中看到陀螺仪的身影。我第一次
2025-08-26 17:36:13
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用
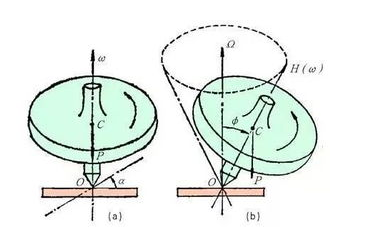
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:00
MEMS陀螺仪有哪些分类?
你是否好奇,手机里的指南针、无人机稳定的飞行姿态,甚至火箭精准的导航,背后都离不开一个微型“旋转感知器”?这就是MEMS陀螺仪!它凭借小巧身材、低廉成本和优异性能,正在取代笨重的传统陀螺仪,深入我们
2025-07-21 15:58:38
MEMS陀螺仪系统的精确导航
电子发烧友网报道(文/李宁远)现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。光纤陀螺仪FOG一度是环形激光陀螺仪RLG的低成本替代
2023-10-24 01:11:00
常见的七大陀螺仪
。基于MEMS的陀螺仪价格相比光纤或者激光陀螺便宜很多,但使用精度非常低,需要使用参考传感器进行补偿,以提高使用精度。MEMS陀螺仪采用的是依赖于相互正交的震动和转动引起的交变科里奥利力,MEMS陀螺仪
![]() wayaj
2020-09-06 07:49:27
wayaj
2020-09-06 07:49:27
MEMS陀螺仪的寻北原理是什么?精度如何?

MEMS陀螺仪的寻北技术核心原理基于地球自转特性,通过测量角速度分量解算出地理北向。随着MEMS技术的不断进步,MEMS陀螺仪性能也在不断提升,已经具备了较高的测量精度和稳定性。
2025-06-04 17:50:04
陀螺仪在钻井或测井中有何用途?

钻井与测井作业对定向和井眼轨迹控制要求较高,传统光纤陀螺仪和磁性测斜仪体积大、抗干扰能力弱、成本高。MEMS陀螺仪凭借其微型化、高可靠性和环境适应性,成为钻井、测井核心器件。
2025-06-10 17:46:08
光纤和光缆有何不同之处?
很多人会有这样的疑问,光纤和光缆有何不同之处?主要是因为光纤和光缆这两个名词容易引起混淆。在严格的定义下,光纤和光缆是两种不同的东西,然而在现实生活中,许多人仍然会混淆这两者。为了更好地理解光纤和光缆之间的区别,我们一起来看一下。
2024-01-15 17:01:40
三轴陀螺仪和六轴的区别
文章目录前言一、陀螺仪传感器陀螺仪:三轴陀螺仪和六轴的区别六轴的区别和九轴陀螺仪的区别二、实验设备1.串口6轴加速度计/陀螺仪MPU6050模块2.USB转TTL 3.3V 5V3.硬件设备准备三
![]() 唯爱萌meng
2021-08-06 08:09:57
唯爱萌meng
2021-08-06 08:09:57
MEMS陀螺仪有多精确?
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:22
MEMS陀螺仪用在哪里?
ER-MG2-50/100作为MEMS陀螺仪中的高精度陀螺仪,具有体积小、重量轻、环境适应性强、价格低廉、便于批量生产等特点,解决了第一代和第二代陀螺仪体积质量大、成本高的缺点,精度和稳定性不断提高
2023-07-10 14:13:18
振动陀螺仪传感器的工作原理

陀螺仪传感器,也称为角速率传感器或角速度传感器,是一种感测角速度的设备。陀螺仪传感器种类繁多,比较常见的有机械陀螺仪,光学陀螺仪,流体陀螺仪和振动陀螺仪。光学陀螺仪和振动陀螺仪,根据使用的内部材料
2025-06-16 16:29:36
MEMS加速度计和MEMS陀螺仪的区别
体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-04-16 15:10:42
MEMS加速度计和MEMS陀螺仪的区别是什么
体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-06-08 17:01:25
什么是陀螺仪
已经有很多大佬介绍过了MPU6050的协议、数据处理方式、滤波算法,所以这部分就不再复述了,本篇主要是针对看不懂长篇大论的小白的简易上手的方法。首先呢还是得简单介绍下什么是陀螺仪:MPU-60X0
![]() 香脆面
2022-02-10 07:24:32
香脆面
2022-02-10 07:24:32
陀螺仪传感器的分类_陀螺仪传感器有什么用
陀螺仪传感器可以全方位的感受空间上位移的变化维较少,最早应用于航空、航天和航海等领域。随着陀螺仪传感器成本的下降,现在很多智能手机都集成有陀螺仪传感器,那么陀螺仪传感器在手机里有什么作用呢?下面小编为大家详细的介绍一下。
2020-12-07 15:01:32
 工商网监
工商网监


