利用MEMS陀螺仪实现电路功能的设计是一个结合硬件电路、信号处理算法和系统集成的过程。核心在于精确检测角速度信号,将其转化为可用的电信号,并进行处理和应用。以下是关键步骤和考虑因素:
一、核心功能实现:角速度检测与转换
-
传感器选型:
- 根据应用需求(量程、带宽、噪声密度、功耗、尺寸、成本、接口类型等)选择合适的MEMS陀螺仪芯片(如ST的LSM6DS系列、Bosch Sensortec的BMG系列、TDK InvenSense的ICM系列等)。
- 关键参数关注:零偏稳定性、角速度随机游走、非线性度、温度稳定性。
-
硬件电路设计 (信号链):
- 电源: 提供极其稳定、低噪声的电源。使用LDO稳压器,并配合π型滤波电路(电容+磁珠)来滤除电源噪声。使用多个不同容值的去耦电容(如0.1uF和10uF)并联放置于芯片电源引脚附近。
- 模拟输出(较少见): 部分老款/特定用途陀螺仪仍提供模拟电压输出。
- 低通滤波 (Anti-Aliasing Filter): 在ADC前加入RC或主动滤波电路,滤除高频噪声并防止采样混叠。
- 信号调理: 可能需要放大或电平移位,以匹配ADC输入范围。
- 数字输出 (主流方式): 现代MEMS陀螺仪多直接输出数字信号(SPI或I²C接口)。
- 通信接口: 正确连接MCU/处理器的SPI或I²C引脚,注意阻抗匹配、上拉电阻(特别是I²C)。走线尽可能短直。
- 主机(MCU/Processor): 需要能够驱动所选通信接口,具备足够的处理能力进行后续计算。
-
信号采集与数字转换:
- 模拟输出: 使用一个高分辨率、低噪声的ADC将模拟电压转换为数字值。采样率需满足奈奎斯特定理(至少是信号最高频率的2倍)。
- 数字输出: 通过通信接口读取陀螺仪内部的ADC转换结果。
二、 数据处理与算法实现(关键价值所在)
读出的原始数据(通常是LSB或dps单位的数字)需要经过处理才能发挥功能:
-
校准: 消除固有误差,是保证精度的基础。
- 零偏校准: 静止时,长时间采集数据求平均值。此平均值即为零偏。后续读数减去零偏。
- 灵敏度(比例因子)校准: 通过施加已知角速度(如精密转台)进行标定。计算实际输出与标称值的比例关系。
- 交叉轴灵敏度校准: 在一个轴上施加角速度,检查其他轴的输出。建立补偿矩阵(可能需要更复杂的标定平台)。
- 温度补偿: 零偏和灵敏度通常受温度影响很大。需要建立零偏/灵敏度与温度的关系模型(查表法、多项式拟合),并用板载温度传感器读数进行实时补偿。
-
滤波: 抑制噪声,提高信噪比。
- 低通滤波: 滤除高频噪声(MEMS自身噪声、电路噪声)。常用移动平均滤波(FIR)或一阶/二阶IIR低通滤波器(如巴特沃斯滤波器)。
- 带宽与响应速度权衡: 带宽越高(低通截止频率越高),响应越快,但包含的噪声也越多;带宽越低,响应越慢,但信号更平滑。根据应用需求(如机器人控制需要快响应,姿态估计可以慢一些)调整滤波器参数。
-
姿态解算/运动跟踪(如果涉及角度/姿态):
- 单纯角速度积分:
角度 = ∫(角速度 - 零偏) dt。此方法存在积分漂移,由于零偏不完全为零或微小噪声积累,角度会随时间发散。 - 传感器融合: 克服积分漂移,常用方法是融合加速度计(提供绝对重力参考,估计倾角)和/或磁力计(提供绝对航向参考)的数据:
- 互补滤波: 简单有效。在低频段信任加速度计(或磁力计)估算的姿态,在高频段信任陀螺仪。
融合角度 = α * (陀螺仪积分角度) + (1-α) * (加速度计/磁力计估算角度)。调整权重系数α。 - 卡尔曼滤波: 更优的解决方案,融合噪声统计特性进行最优估计,可同时估算姿态角及其变化率(角速度)。需要建立系统模型和测量模型,计算量稍大。开源的Madgwick或Mahony AHRS滤波算法也被广泛使用,复杂度介于互补和卡尔曼之间。
- 互补滤波: 简单有效。在低频段信任加速度计(或磁力计)估算的姿态,在高频段信任陀螺仪。
- 单纯角速度积分:
三、实现特定电路功能的设计思路
处理后的角速度信息或解算的姿态信息可用于控制电路或实现功能:
-
姿态稳定与控制:
- 无人机/自平衡车: 检测俯仰角/滚转角的变化率或角度,闭环反馈给控制器(如PID),驱动电机/舵机保持平衡或姿态。
- 云台/相机稳定: 检测手持抖动产生的角速度,驱动伺服电机反向补偿,保持拍摄目标稳定。
- 工业机械臂: 监控关节角速度,实现精确运动控制和安全保护(限速)。
-
导航与航向参考:
- INS(惯性导航系统): 与加速度计、磁力计配合,进行航迹推算(Dead Reckoning)。短时间精度高,但位置误差随时间累积。常与GPS融合。
- AHRS(姿态航向参考系统): 提供高精度的三维姿态(俯仰角、滚转角)和航向角(偏航角)。
-
手势识别:
- 通过识别特定的角速度或姿态变化序列(如上下晃动、左右翻腕等),转化为控制指令(如切换PPT、调节音量)。需要建立手势数据库和模式识别算法(如基于阈值、模板匹配或机器学习)。
-
动作检测与交互:
- 检测突然的翻转、敲击(由角速度脉冲判断)、旋转(如游戏手柄)。
- 虚拟现实/增强现实:高精度、低延迟地追踪头部运动。
-
防抖功能:
- 智能手机/相机:检测微小晃动,触发电子防抖(EIS)算法对图像帧进行裁剪和反向移动补偿,或提供信息给镜头光学防抖(OIS)机构。
-
机械健康监测:
- 安装在旋转设备上,通过频谱分析等方法检测异常振动角速度信号,预判故障。
四、设计中的关键挑战与解决方案
- 噪声与漂移:
- 硬件: 优化电源、PCB布局(模拟/数字分离,短连接,地平面)、屏蔽。
- 软件: 精心校准(尤其温补)、有效滤波(低通带宽选择合理)。
- 零点偏移稳定性: 高精度、大温补范围的陀螺仪,严格的温补校准。
- 带宽限制: 选择高带宽器件,或优化控制/处理环路速度。高动态运动可能超出传感器带宽。
- 功耗: 针对便携设备,选择低功耗模式、优化采样率和数据处理复杂度。
- 成本: 根据性能要求选择合适的传感器等级。
- 接口与通信: 合理设计总线负载,注意速率和干扰。
五、总结
利用MEMS陀螺仪设计功能电路的核心流程为:
- 需求分析 -> 器件选型 -> 硬件设计(供电、接口、布局布线)-> 信号采集 -> 基础校准 -> 噪声滤波 -> (如需姿态)多传感器融合 -> (最终目标)功能算法实现与应用。
成功的MEMS陀螺仪应用设计高度依赖于对器件特性的深入理解、精密的校准技术、有效的信号处理算法以及针对特定应用场景的功能实现。它通常不是一个孤立的电路,而是嵌入式系统中的一个关键感知单元。
什么是MEMS陀螺仪?
Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:47
MEMS陀螺仪正在取代光纤陀螺仪?
一、微型科技巨匠:MEMS陀螺仪揭秘 何谓MEMS? MEMS(微机电系统)是融合了微电子与微机械的神奇技术。它能在指甲盖大小的硅芯片上集成复杂的传感器、执行器和处理电路,实现微观世界的数据感知
2025-07-08 16:45:36
利用陶瓷基板实现小型化MEMS陀螺仪
摘要:MEMS(微机电系统)陀螺仪在惯性导航、姿态控制和运动测量等领域中具有重要应用。然而,传统MEMS陀螺仪在尺寸和性能方面存在一定的限制。本文介绍了一种基于陶瓷基板的技术芯片实现了小型化MEMS
2023-07-10 15:03:37
MEMS陀螺仪如何实现高精度寻北?
MEMS陀螺仪的寻北功能,其核心在于精确测量地球自转角速度的分量。通过解算这些分量,即可确定地理北向。得益于MEMS技术的持续发展,此类陀螺仪在精度与稳定性方面已实现显著跃升。
2025-07-29 18:00:47
MEMS陀螺仪的工作原理及采用差分及四核的设计结构的原因
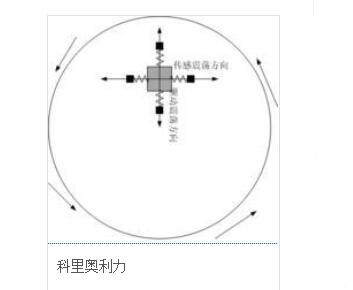
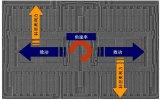
MEMS 陀螺仪的基本工作原理是通过科里奥利力来实现的,演示文稿中利用生动的动画讲述了这一原理,并介绍了为什么工业级的陀螺仪要采用差分甚至是四核的设计结构。当然,MEMS 陀螺仪的设计架构中还用到了MEMS加速度计的基本设计单元。
2019-07-31 06:18:00
MEMS陀螺仪的寻北原理是什么?精度如何?

MEMS陀螺仪的寻北技术核心原理基于地球自转特性,通过测量角速度分量解算出地理北向。随着MEMS技术的不断进步,MEMS陀螺仪性能也在不断提升,已经具备了较高的测量精度和稳定性。
2025-06-04 17:50:04
常见的七大陀螺仪
利用coriolis,将旋转物体的角速度转换成与角速度成正比直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的。MEMS陀螺仪 ●陀螺仪的发展状况 ▲不同种
![]() wayaj
2020-09-06 07:49:27
wayaj
2020-09-06 07:49:27
MEMS加速度计和MEMS陀螺仪的区别
MEMS加速度计和MEMS陀螺仪的区别 1、MEMS陀螺仪测角速度的 2、MEMS加速度是测线性加速度的 MEMS陀螺仪MEMS陀螺仪利用科里奥利力旋转物体在有径向运动时所受到的切向力。假设旋转物
2020-04-16 15:10:42
MEMS陀螺仪用在哪里?
ER-MG2-50/100作为MEMS陀螺仪中的高精度陀螺仪,具有体积小、重量轻、环境适应性强、价格低廉、便于批量生产等特点,解决了第一代和第二代陀螺仪体积质量大、成本高的缺点,精度和稳定性不断提高
2023-07-10 14:13:18
MEMS加速度计和MEMS陀螺仪的区别是什么
MEMS加速度计和MEMS陀螺仪的区别 1、MEMS陀螺仪测角速度的 2、MEMS加速度是测线性加速度的 MEMS陀螺仪MEMS陀螺仪利用科里奥利力旋转物体在有径向运动时所受到的切向力。假设旋转物
2020-06-08 17:01:25
MEMS陀螺仪系统的精确导航
,随着MEMS陀螺仪的兴起,在车辆导航、机械控制等领域,精确导航的竞争一直在对峙。 导航核心——陀螺惯性测量单元 在高精度的捷联惯导系统中,陀螺惯性测量单元是绝对的核心。很长一段时间以来,激光陀螺仪都是中高精度惯导系统
2023-10-24 01:11:00
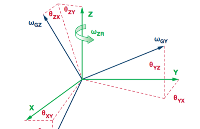
MEMS IMU/陀螺仪对准基础
(θXω, θYω, θZω) 和各陀螺仪的积分(θXG, θYG, θZG)。实例2一种地面无人驾驶车辆(UV) 利用MEMS IMU作为平台稳定控制(PSC) 系统中的反馈传感器以支持其天线。此
![]() 雪大大11
2019-10-16 08:00:00
雪大大11
2019-10-16 08:00:00
ADI公司新款MEMS陀螺仪的特性分析
本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。
2019-07-16 06:12:00
陀螺仪的应用
在消费电子领域的创新应用 陀螺仪的出现,给了消费电子很大的应用发挥空间。比如就设备输入的方式来说,在键盘、鼠标、触摸屏之后,陀螺仪又给我们带来了手势输入,由于它的高精度,甚至还可以实现电子签名;还比如
![]() wayaj
2020-09-04 07:52:53
wayaj
2020-09-04 07:52:53
Pinpoint系列MEMS陀螺仪的构造和性能
Mark Marshall博士将探讨这款MEMS陀螺仪的工作原理,并详细介绍其性能规格和Pinpoint结构,包括MEMS振动环的设计与制造。
2023-03-20 09:43:47
两款同类MEMS陀螺仪产品的性能分析
本陀螺仪演示视频介绍2个ADI MEMS陀螺仪(ADXRS800、ADXRS450)和2个同类陀螺仪产品。可以看到每个陀螺仪对施加的旋转速率所做出的响应。同时还展示了ADI公司陀螺仪出色的冲击和振动抑制性能。
2019-07-16 06:15:00
微机械陀螺仪工作原理_微机械陀螺仪的应用
微机械陀螺仪(MEMS gyroscope)的工作原理 传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。但是微机械陀螺仪的工作原理不是
2021-02-01 15:02:01

MEMS陀螺仪有多精确?
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:22
什么是陀螺仪
是世界上第一款集成 6 轴MotionTracking设备。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Proce...
![]() 香脆面
2022-02-10 07:24:32
香脆面
2022-02-10 07:24:32
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:00
单轴偏航MEMS陀螺仪的结构及原理
陀螺仪能够测量沿一个轴或几个轴运动的角速度,是补充MEMS加速计功能的理想技术。事实上,如果组合使用加速计和陀螺仪这两种传感器,系统设计人员可以跟踪并捕捉三维空间的完整运动,为最终用户提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
2019-05-20 08:49:40
MEMS陀螺仪有哪些分类?
你是否好奇,手机里的指南针、无人机稳定的飞行姿态,甚至火箭精准的导航,背后都离不开一个微型“旋转感知器”?这就是MEMS陀螺仪!它凭借小巧身材、低廉成本和优异性能,正在取代笨重的传统陀螺仪,深入我们
2025-07-21 15:58:38
 工商网监
工商网监


