三轴陀螺仪是一种用于测量物体角速度(绕X、Y、Z三个相互垂直轴旋转的速率)的传感器。它在现代科技中应用广泛(如智能手机、无人机、机器人、导航系统等),其核心原理主要基于以下物理学基础:
-
核心物理原理:科里奥利效应 (Coriolis Effect)
- 核心概念: 当一个物体在旋转参考系中进行径向运动时,它会受到一个垂直于运动方向的惯性力,称为科里奥利力。
- 在陀螺仪中的应用: 现代主流的三轴陀螺仪(尤其是MEMS微机电系统陀螺仪)利用这个效应来检测旋转。它包含一个高速振动(振荡)的质量块(称为“谐振器”或“振动质量”)。
-
工作过程(以MEMS陀螺仪为例):
- 驱动模式: 陀螺仪内部有一个可活动的高频谐振结构(通常是音叉状或梳齿状)。在静电力或压电力驱动下,这个质量块以特定的固定频率和振幅沿着一个轴线(称为驱动轴,例如X轴)进行高频往复振动(直线运动)。这是一种受控的“径向运动”。初始状态时,系统记录振动的位置或振幅基准。
- 感测模式(角速度检测):
- 当整个陀螺仪(连同其内部振动的质量块)绕测量轴(例如Z轴)发生旋转(即产生角速度)时,由于陀螺仪外壳和基座参与了旋转,而振动质量块由于惯性试图保持其原有的振动平面不变。
- 根据科里奥利效应,质量块在旋转参考系中进行的振动(驱动方向运动)会感生一个垂直于驱动方向和旋转方向的力,即科里奥利力。这个力作用于质量块上。
- 这个科里奥利力会迫使质量块在其原有驱动振动的基础上,沿着垂直于驱动轴和旋转轴的第三个轴(即感测轴,例如Y轴)产生一个微小的、同步的振动位移(运动) 。这个位移的大小与驱动方向的速度以及施加的角速度大小成正比。
- 信号检测: 通过集成在感测轴方向的电容式传感器(或其他类型的传感器,如压阻式),可以精确地检测到这个由科里奥利力引起的微小位移变化。感测电极测量振动质量块与固定电极之间电容的变化(位移导致间隙变化)。
- 角速度计算: 传感器将检测到的电容变化(代表感测方向位移)转换为电信号(通常是电压信号)。这个信号的大小与感测方向的位移成正比,而位移又与驱动速度(已知且恒定)和旋转角速度成正比。通过复杂的电路(前置放大器、解调电路、滤波器等)处理这个信号,最终输出一个与绕感测轴角速度成正比的电压信号。
-
“三轴”的实现:
- 一个典型的“三轴”陀螺仪芯片内部通常集成了三组独立的感测结构:
- 一组用于检测绕X轴的角速度(设计为驱动轴是Y,感测轴是Z)。
- 一组用于检测绕Y轴的角速度(驱动轴是Z,感测轴是X)。
- 一组用于检测绕Z轴的角速度(驱动轴是X,感测轴是Y)。
- 这三套结构在芯片内正交布置,各自工作,互不干扰,共同实现对三维空间中任意方向旋转角速度的测量。
- 一个典型的“三轴”陀螺仪芯片内部通常集成了三组独立的感测结构:
关键点总结:
- 输入: 物体的角速度(旋转速率)。
- 测量原理: 利用科里奥利效应,将旋转角速度转换为振动质量块在垂直方向上的微小位移。
- 信号转换: 通过电容式传感器(最常见)检测位移,转换为电信号。
- 输出: 与绕特定轴角速度成正比的模拟电压或数字信号(经过ADC转换)。
- 最终得到的数据: 角速度(°/s 或 rad/s) ,绕三个垂直轴(X, Y, Z)的分量。
重要说明:
- 陀螺仪输出的是角速度(旋转的快慢),直接读数不是绝对的角度(朝向)。为了得到角度(例如姿态角),需要将角速度输出对时间进行积分。积分过程会累积误差(漂移),因此实际应用中常结合加速度计(提供静止或匀速直线运动下的绝对姿态参考)和磁力计(提供绝对方位角参考)进行传感器融合(如卡尔曼滤波),以获得更稳定准确的角度信息。
- 陀螺仪本身存在误差源,包括零偏(零位误差)、噪声、灵敏度误差、轴间交叉敏感等,需要进行校准。
- MEMS陀螺仪因其体积小、成本低、功耗低、可靠性高而被广泛应用,其核心就是基于科里奥利效应的振动结构。
应用(得益于以上原理):
- 姿态稳定与控制: 无人机、平衡车、机器人、摄像机稳定云台(通过测量姿态变化速率来实时调整)。
- 导航系统(INS的一部分): 车辆、船舶、飞机(与加速度计组合,通过积分推算位置和方向,但需外部如GPS修正漂移)。
- 手势识别/人机交互: 游戏手柄、VR/AR控制器(追踪用户手部或头部转动)。
- 屏幕旋转: 智能手机自动切换横屏竖屏。
- 图像防抖: 相机/手机通过检测微小晃动来移动镜头或电子裁切补偿。
陀螺仪三轴六轴区别
陀螺仪是一种用于测量物体旋转的装置,尤其在航空航天领域和导航应用中得到广泛应用。陀螺仪根据其测量的轴数可以分为三轴陀螺仪和六轴陀螺仪。在本文中,我们将详细讨论三轴陀螺仪和六轴陀螺仪的区别。 首先
2024-01-02 14:22:10
三轴陀螺仪模块怎么使用
三轴陀螺仪模块是一种用于测量角速度和方向的传感器,可以在航空航天、汽车、无人机等领域广泛应用。本文将详细介绍三轴陀螺仪模块的原理、使用方法和注意事项。 一、原理介绍 陀螺仪原理 陀螺仪利用
2023-12-20 10:36:02
陀螺仪x和y比例是多少 陀螺仪x轴和y轴是指什么
陀螺仪是一种用于测量和感应物体旋转和转动的设备,它通常由三个轴组成:x轴、y轴和z轴。在陀螺仪中,x轴和y轴通常成对出现,关于它们的比例可以因具体应用而异。 首先,我们先了解一下陀螺仪的工作原理
2024-01-17 11:10:11
陀螺仪三轴轴承怎么安装
陀螺仪是一种用于测量旋转角度的仪器,广泛应用于无人机、机器人、汽车等领域。在安装陀螺仪的过程中,轴承起到了至关重要的作用,它能够保证陀螺仪的平稳运行和准确测量。本文将详细介绍陀螺仪三轴轴承的安装步骤
2024-01-02 14:26:45
三轴陀螺仪和六轴的区别
文章目录前言一、陀螺仪传感器陀螺仪:三轴陀螺仪和六轴的区别六轴的区别和九轴陀螺仪的区别二、实验设备1.串口6轴加速度计/陀螺仪MPU6050模块2.USB转TTL 3.3V 5V3.硬件设备准备三
![]() 唯爱萌meng
2021-08-06 08:09:57
唯爱萌meng
2021-08-06 08:09:57
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法。
2023-08-21 14:40:37
三轴陀螺仪是什么 三轴陀螺仪芯片怎么使用
三轴陀螺仪基于微机电系统(MEMS)技术或光学原理工作。它通常由三个独立的感测器组成,每个感测器测量物体围绕一个轴的旋转速度。这些感测器可以是微机电系统加速度计、角速度计或由光学器件组成的模块。
2023-07-25 12:44:31
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

在现代无人机技术中,三轴MEMS陀螺仪扮演着至关重要的角色。作为飞行控制系统的核心传感器,它通过实时测量飞行器的角速度变化,为稳定飞行提供关键数据支持。以ER-3MG-063 MEMS陀螺仪为例,让我们深入了解三轴MEMS陀螺仪核心优势和应用价值。
2025-08-07 17:37:05
常见的七大陀螺仪
。陀螺仪传感器原本是运用到直升机模型上的,已经被广泛运用于手机这类移动便携设备上(IPHONE的三轴陀螺仪技术)。 光纤陀螺仪。光纤陀螺仪是以光导纤维线圈为基础的敏感元件,由激光二极管发射出的光线朝两个方向
![]() wayaj
2020-09-06 07:49:27
wayaj
2020-09-06 07:49:27
什么是MEMS陀螺仪?
Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:47
MPU-6050模块三轴加速度+三轴陀螺仪简介
MPU-6050模块三轴加速度+三轴陀螺仪简介模块引脚说明名称接线简介MPU-6050集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,可用IIC接口连接一个
![]() sunnyking
2022-02-10 07:17:39
sunnyking
2022-02-10 07:17:39
陀螺仪的工作原理及创新应用
个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种
![]() wayaj
2020-09-09 08:48:00
wayaj
2020-09-09 08:48:00
陀螺仪的基本组成及工作原理
设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。因此
![]() 一只耳朵怪
2020-12-17 16:31:35
一只耳朵怪
2020-12-17 16:31:35
多轴陀螺仪怎么选?

在无人机、机器人、VR等智能设备中,姿态传感器是感知运动的核心。面对市场上六轴、九轴、十轴等不同配置,该如何选择?本文以海凌科HLK-AS201系列为例,为你清晰解析三者的区别与选型要点。一、六轴
2025-12-22 15:27:11
陀螺仪的作用
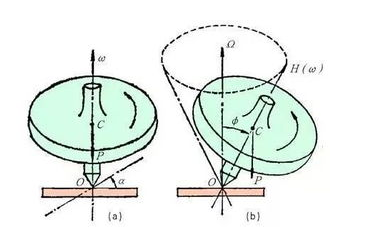
。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。 定轴性(inertia or rigidity)。当陀螺转子以高速旋转时,在没有任何外力
![]() wayaj
2020-09-03 07:29:47
wayaj
2020-09-03 07:29:47
单轴偏航MEMS陀螺仪的结构及原理
陀螺仪能够测量沿一个轴或几个轴运动的角速度,是补充MEMS加速计功能的理想技术。事实上,如果组合使用加速计和陀螺仪这两种传感器,系统设计人员可以跟踪并捕捉三维空间的完整运动,为最终用户提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
2019-05-20 08:49:40
三轴陀螺仪测量摆杆的设计
,MCU通过控制LM298N电机驱动模块来控制直流减速电机,进而控制摆杆的状态,并使用LCD显示相关参数。方案的比较与选择2.1传感器的选择 方案一:采用三轴陀螺仪测量摆杆的偏转角度。当选用三轴陀螺仪检测摆杆的偏转角度时,虽然可以计算摆杆的偏转角度,但是传感器必须要固定在摆杆上,同时需与M...
![]() 悬崖勒马2
2021-11-30 06:35:50
悬崖勒马2
2021-11-30 06:35:50
三轴寻北MEMS陀螺仪

2024-12-30 13:45:20
爱普生(EPSON)陀螺仪传感器的特点和应用领域介绍

爱普生陀螺仪传感器从用途上分为常规用途和汽车用陀螺仪传感器和惯性测量单元(IMU)。以检测轴数量来分,可以分为单轴陀螺仪、三轴陀螺仪、六轴陀螺仪(三个方向角度+三个方向的加速度);常规单轴陀螺仪
2024-07-03 10:16:44
陀螺仪姿态矫正问题
的载体坐标系的风速风向转换到参考坐标中,但是我现在只有x、y轴二维平面的数据,没有测Z轴方向的风速数据,转换矩阵是三维的姿态角矩阵,请问在转换的时候是直接令Z轴方向的速度等于0计算吗?
![]() QIANRUSHIZHANG
2019-05-31 04:36:04
QIANRUSHIZHANG
2019-05-31 04:36:04
陀螺仪定轴性原理 陀螺仪xyz三个轴怎么定义的
陀螺仪的定轴性原理是基于物体的角动量守恒定律。根据角动量守恒定律,当一个物体不受外力或外力矩的作用时,其角动量将保持不变。
2023-07-26 15:01:01
MEMS IMU/陀螺仪对准基础
误差。公式5、公式6和公式7显示了对准误差对各陀螺仪绕全局坐标系中指定轴旋转的响应的影响。在这些公式中,对准角度误差的余弦引入一个比例误差。图5. 正交三轴陀螺仪的对准误差对准误差还会对各轴产生跨轴
![]() 雪大大11
2019-10-16 08:00:00
雪大大11
2019-10-16 08:00:00
陀螺仪三轴角速度转姿态角速度
陀螺仪是一种用于测量物体的角速度的仪器,可以通过测量物体绕三个轴(如x、y和z轴)的旋转速度来确定物体的姿态角速度。在本文中,我们将详细介绍陀螺仪三轴角速度转姿态角速度的原理和应用。 陀螺仪
2024-01-02 14:24:24
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:00
digilent三轴数字陀螺仪介绍

PmodGYRO是一个基于STL3G4200D的三轴陀螺仪。通过SPI或I2C与芯片通信,用户可以配置该模块,使其在高达800HZ的输出率下报告高达2000dps分辨率的角动量。
2019-11-29 15:37:09
陀螺仪的应用
`陀螺仪在航天航空中的应用 陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。 陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感
![]() wayaj
2020-09-04 07:52:53
wayaj
2020-09-04 07:52:53
光纤陀螺仪与旋转式陀螺仪的工作原理解析
光纤陀螺仪(FOGs)与常用于玩具中的旋转式陀螺仪类似,因为这两种陀螺仪都能测量物体的旋转。但这两种陀螺仪的工作机制却不同:光纤陀螺仪内部没有运动部件,而是用光进行测量。
2019-10-10 15:22:31
九轴传感器之陀螺仪
上海润欣科技股份有限公司创研社接上一篇“九轴传感器之加速度计”,本篇主要讲述九轴姿态传感器中的陀螺仪部分。陀螺仪传感器可以让物体在运动过程中感知其水平、垂直、俯仰、航向和角速度等信息。关于三轴陀螺仪
2019-09-26 18:55:34
 工商网监
工商网监


