好的,MEMS陀螺仪(微机电系统陀螺仪)是一种利用微加工技术在硅基片上制造的微型角速度传感器。其工作原理主要基于科里奥利效应 (Coriolis Effect)。
MEMS陀螺仪的核心工作原理:科里奥利效应
- 振动质量块 (Proof Mass / Resonating Mass): MEMS陀螺仪内部有一个或多个微小的可移动质量块(通常由硅制成)。
- 驱动模式 (Drive Mode / Primary Mode): 这个质量块被施加一个特定频率(谐振频率)的驱动力,使其在一个特定方向上(驱动轴,或称为“敏感”方向)持续、稳定地做高频往复振动(通常是线性的正弦或余弦振动)。这种持续振动就是陀螺仪的“参照运动”。
- 施加角速度 (Input Rotation): 当整个陀螺仪芯片(即承载质量块的基底)绕垂直于驱动轴的另一个轴(称为“感测轴”或“输出轴”)旋转时,就会发生关键的一步。
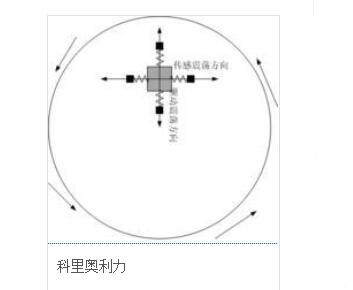
- 科里奥利力产生 (Coriolis Force): 根据物理学的科里奥利效应:
- 当一个物体在一个旋转参考系中做径向运动(指向或背离旋转中心的运动)时,会感受到一个垂直于运动方向和旋转轴方向的惯性力——科里奥利力。
- 在陀螺仪中,振动质量块的驱动方向运动(线性振动)可以被分解为不断地靠近和远离旋转中心(即旋转的轴心)的分量。
- 因此,当基底旋转时,质量块的驱动振动分量就构成了这种“径向运动”,从而在垂直于驱动轴和旋转轴(感测轴)的方向上产生一个科里奥利力。
- 感测模式 (Sense Mode / Secondary Mode): 这个科里奥利力会迫使质量块在感测轴的方向上产生微小的位移或振动。这个感测方向上的运动是与输入的角速度成正比的。
- 位移检测与信号转换: 感测方向上产生的微小位移会被检测到(通常通过电容检测法:感测轴方向上的电极和质量块形成变化的电容器,位移引起电容变化)。这个电容变化被转换成电信号。
- 信号处理: 产生的微弱电信号会被放大、滤波、解调(通常驱动和感测信号频率相同,但存在相位差)。最终处理后的电信号电压大小与输入的角速度大小成正比,信号极性指示旋转方向。
总结关键点: MEMS陀螺仪不直接测量旋转角度,而是通过测量因旋转而产生的科里奥利力所引起的微小振动位移来间接测量旋转角速度 (度/秒 或 弧度/秒)。
MEMS陀螺仪的主要应用
得益于其小型化、低成本、低功耗、易于集成的优势,MEMS陀螺仪在现代电子设备中应用极其广泛:
- 消费电子:
- 智能手机/平板电脑: 屏幕旋转(横屏/竖屏自动切换)、手势识别、游戏控制、相机光学防抖 (OIS)、室内导航(与加速度计、磁力计融合)。
- 可穿戴设备: 智能手表/手环的活动跟踪(计步、运动类型识别)、姿势监测。
- 游戏控制器: 体感控制,如游戏手柄、VR/AR头显的位置和方向跟踪。
- 无人机/航模: 核心飞控传感器,用于姿态稳定(横滚、俯仰、偏航控制)、导航。
- 汽车电子:
- 电子稳定控制系统: 检测车辆的横摆角速度(是否甩尾或转向不足),是ESP、ESC等系统的核心传感器。
- 导航系统 (INS/GPS融合): 在隧道或GPS信号弱的地方提供连续的航向和姿态信息。
- 高级驾驶辅助系统: 车道保持辅助 (LKA)、自适应巡航控制 (ACC)、自动泊车等都需要车辆姿态和转弯信息。
- 安全气囊控制: 某些高级气囊系统通过角速度判断碰撞类型(如侧翻)。
- 车载娱乐系统: 控制菜单或特定功能(如某些车型的手势控制)。
- 工业自动化与机器人:
- 机器人平台导航与定位: AGV(自动导引车)、AMR(自主移动机器人)、无人机等都需要精确的姿态和航向信息。
- 平台稳定与控制: 工业机械臂的运动控制、稳定平台(如摄像头稳定云台、天线稳定平台)的姿态反馈。
- 振动监测与分析: 有时用于检测设备的异常旋转振动。
- 航空航天与国防:
- 惯性导航系统: 中低精度平台的重要组成部分,用于导弹制导、飞机姿态参考、卫星姿态控制等(通常需要与其他高精度传感器融合)。
- 稳定与指向系统: 光电吊舱、瞄准具的稳定。
- 医疗设备:
- 手术机器人: 末端执行器的精细运动跟踪。
- 假肢与康复设备: 动作检测和控制。
- 生物医学监测: 研究身体运动。
- 药物输送设备: 例如智能吸入器或注射器的定位和触发。
MEMS陀螺仪精度与挑战
- MEMS陀螺仪的精度范围很广,从消费级的低精度(如手机中的几度/秒的零偏)到工业级和战术级的高精度(如0.1度/小时或更高零偏稳定性)。
- 主要挑战包括克服温度漂移、振动敏感性、零偏稳定性等影响精度的因素。高精度应用需要通过复杂的算法(如传感器融合、卡尔曼滤波)来校正误差,通常需要与加速度计、磁力计甚至卫星导航信号组合使用(构成惯性测量单元 - IMU 或 惯性导航系统 - INS)。
总而言之,MEMS陀螺仪是感知角速度的核心微传感器,其基于科里奥利效应的独特工作原理使得它能够在微小尺寸上实现重要功能,从而在现代科技的无数领域中发挥着不可或缺的作用。
MEMS陀螺仪的工作原理及采用差分及四核的设计结构的原因
MEMS 陀螺仪的基本工作原理是通过科里奥利力来实现的,演示文稿中利用生动的动画讲述了这一原理,并介绍了为什么工业级的陀螺仪要采用差分甚至是四核的设计结构。当然,MEMS 陀螺仪的设计架构中还用到了MEMS加速度计的基本设计单元。
2019-07-31 06:18:00
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:00
什么是MEMS陀螺仪?
Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:47
微机械陀螺仪工作原理_微机械陀螺仪的应用
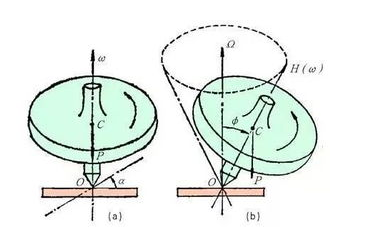
微机械陀螺仪(MEMS gyroscope)的工作原理 传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。但是微机械陀螺仪的工作原理不是
2021-02-01 15:02:01
陀螺仪的工作原理及创新应用
`先来看一段视频,俄罗斯教授演示陀螺仪稳定器的工作原理: ●陀螺仪的名字由来陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先
![]() wayaj
2020-09-09 08:48:00
wayaj
2020-09-09 08:48:00
Pinpoint系列MEMS陀螺仪的构造和性能
Mark Marshall博士将探讨这款MEMS陀螺仪的工作原理,并详细介绍其性能规格和Pinpoint结构,包括MEMS振动环的设计与制造。
2023-03-20 09:43:47
MEMS陀螺仪正在取代光纤陀螺仪?
、处理与输出。 MEMS陀螺如何“感知”旋转? 别被名字迷惑!现代MEMS陀螺仪并非依靠传统陀螺的旋转飞轮。其核心原理是科里奥利力。想象一下: 芯片内部有微小的振动质量块(“驱动”方向振动)。 当整个器件发生旋转时,振动质量块会受到一个垂直方
2025-07-08 16:45:36
陀螺仪的基本组成及工作原理
(是指力矩马达、信号传感器等)。 陀螺仪的工作原理 陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,物体会感受到一个垂直
![]() 一只耳朵怪
2020-12-17 16:31:35
一只耳朵怪
2020-12-17 16:31:35
光纤陀螺仪与旋转式陀螺仪的工作原理解析
光纤陀螺仪(FOGs)与常用于玩具中的旋转式陀螺仪类似,因为这两种陀螺仪都能测量物体的旋转。但这两种陀螺仪的工作机制却不同:光纤陀螺仪内部没有运动部件,而是用光进行测量。
2019-10-10 15:22:31
陀螺仪工作原理以及不同种类陀螺仪之间的差异
文件第四步 编译并下载,观察实验现象【思考题】1、选择题2、简答题【实验目的】熟悉陀螺仪工作原理,了解不同种类陀螺仪之间的差异;熟悉MPU6050的输出形式,熟悉MPU6050的通信方法;掌握S...
![]() caokyo
2021-08-06 06:08:22
caokyo
2021-08-06 06:08:22

陀螺仪的种类有哪些?
对于角速度传感器,很多人可能会比较陌生,不过,如果说起陀螺仪,大家还是比较熟悉的。陀螺仪,是一种用来测量角速度的装置。根据不同的工作原理,陀螺仪有哪些类型呢?
![]() h1654155957.9663
2019-09-12 09:05:05
h1654155957.9663
2019-09-12 09:05:05
MEMS陀螺仪的寻北原理是什么?精度如何?

MEMS陀螺仪的寻北技术核心原理基于地球自转特性,通过测量角速度分量解算出地理北向。随着MEMS技术的不断进步,MEMS陀螺仪性能也在不断提升,已经具备了较高的测量精度和稳定性。
2025-06-04 17:50:04
陀螺仪传感器工作原理
陀螺仪传感器是一种广泛应用于航空、航天、导航和自动化控制系统中的重要传感器。它的主要作用是测量并感知物体的角速度。本文将详细介绍陀螺仪传感器的工作原理。 陀螺仪传感器的工作原理基于陀螺效应,也称为
2024-01-02 14:45:42
MEMS陀螺仪有多精确?
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:22
陀螺仪是什么?陀螺仪工作原理

因为ST选用了音叉方法设计陀螺仪,其差分特性使系统本身对作用在传感器上的无用线性加速度和杂乱振动的敏感度低于市场上现有的其它类型陀螺仪。当这些无用的信号被施加到陀螺仪,两个质点就会沿相同方向位移,在一个差分测量后,最终的电容变化将视为无效。
2023-10-08 16:49:56
MEMS陀螺仪有哪些分类?
你是否好奇,手机里的指南针、无人机稳定的飞行姿态,甚至火箭精准的导航,背后都离不开一个微型“旋转感知器”?这就是MEMS陀螺仪!它凭借小巧身材、低廉成本和优异性能,正在取代笨重的传统陀螺仪,深入我们
2025-07-21 15:58:38
MEMS陀螺仪用在哪里?
ER-MG2-50/100作为MEMS陀螺仪中的高精度陀螺仪,具有体积小、重量轻、环境适应性强、价格低廉、便于批量生产等特点,解决了第一代和第二代陀螺仪体积质量大、成本高的缺点,精度和稳定性不断提高
2023-07-10 14:13:18
MEMS加速度计和MEMS陀螺仪的区别
体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-04-16 15:10:42
振动陀螺仪传感器的工作原理

陀螺仪传感器,也称为角速率传感器或角速度传感器,是一种感测角速度的设备。陀螺仪传感器种类繁多,比较常见的有机械陀螺仪,光学陀螺仪,流体陀螺仪和振动陀螺仪。光学陀螺仪和振动陀螺仪,根据使用的内部材料
2025-06-16 16:29:36
MEMS加速度计和MEMS陀螺仪的区别是什么
体有径向速度Vr,那么将会产生切向科里奥利加速度。 MEMS加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。 现在一般
2020-06-08 17:01:25
 工商网监
工商网监


